
- 1unity 背包选中_Unity UGUI背包系统(五) 之 物品浮动提示框实现
- 2Unity打包后的各种数据库问题_unity发布读取不到数据库文件怎么办
- 3云技术,智能家居与嵌入式——前景好的产业
- 4linux安装Cassandra数据库_linux安装cassandra csdn
- 5android 设置 屏幕旋转 不重启应用_三星折叠屏|保持屏幕状态
- 6软件测试面试题(二)_购物车白盒测试
- 7【线性代数基础】
- 8Pytorch 训练与测试时爆显存(out of memory)的一个解决方案_pytorch 缓存
- 9机器学习笔记(9)——随机森林算法(RandomForest,RF)_随机森林特征向量
- 10【OpenCV】第十二章: 图像轮廓_contours, _ = cv2.findcontours(binary,cv2.retr_tre
STM32设置为I2C从机模式(HAL库版本)_stm32l0 hal 模拟i2c从机接收
赞
踩
STM32设置为I2C从机模式(HAL库版本)
前言
我之前出过一篇关于STM32设置为I2C从机的博客,现在应粉丝要求,出一篇HAL库版本的I2C从机编程。
基于官方库版本的可以看下我之前发的文章:STM32设置为I2C从机模式
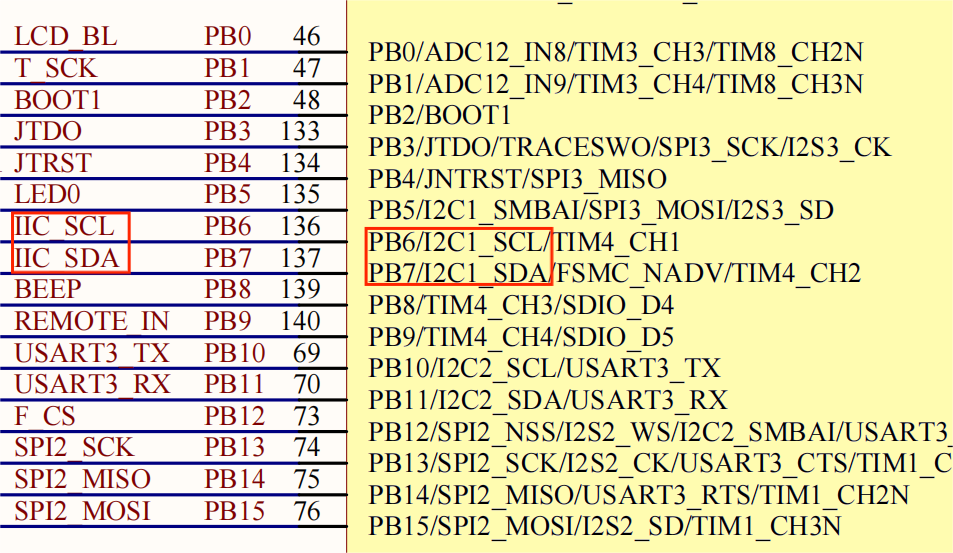
1 硬件连接
测试芯片:STM32F103RCT6
测试方法:用一个USB转I2C的工具接到STM32的I2C引脚上,通过上位机工具进行读写操作。如果没有这个工具,也可以用另外一组I2C作为主机或者其他设备测试通讯,同时也可以借助示波器或者逻辑分析仪来辅助调试。
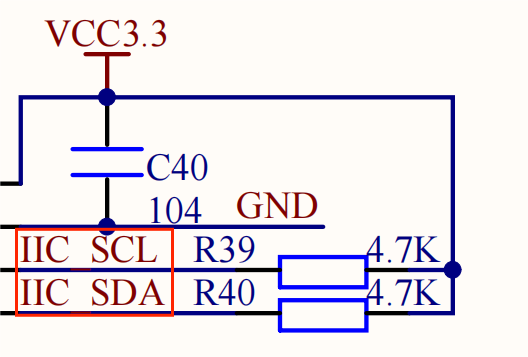
硬件连接:
STM32这边使用硬件I2C1(PB6、PB7),并外接上拉电阻。
本次测试中使用的USB转I2C的工具如下图所示:

2 软件编程
2.1 步骤分解
1、初始化I2C配置
注:除了最后的HAL_I2C_EnableListen_IT()函数,其他代码都可以用STM32CubeMX自动生成
参考代码:
static void MX_I2C1_Init(void) { hi2c1.Instance = I2C1; // 配置I2C1 hi2c1.Init.ClockSpeed = 100000; // 时钟频率:100k hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2; // 占空比:1/2 hi2c1.Init.OwnAddress1 = 0x80; // 本机地址:0x80(若作为从设备则是从机地址) hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT; // 地址模式:7位 hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE; // 禁止双地址 hi2c1.Init.OwnAddress2 = 0; // 第二地址 hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE; // 禁止广播 hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE; // 禁止时钟拉伸 if (HAL_I2C_Init(&hi2c1) != HAL_OK) // I2C1初始化 { Error_Handler(); } HAL_I2C_EnableListen_IT(&hi2c1); // 使能I2C1的侦听中断 }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
2、初始化I2C引脚和中断
参考代码:
注:这个代码可以用STM32CubeMX自动生成
void HAL_I2C_MspInit(I2C_HandleTypeDef* hi2c) { GPIO_InitTypeDef GPIO_InitStruct = {0}; if(hi2c->Instance==I2C1) { // 配置GPIO __HAL_RCC_GPIOB_CLK_ENABLE(); GPIO_InitStruct.Pin = GPIO_PIN_6|GPIO_PIN_7; GPIO_InitStruct.Mode = GPIO_MODE_AF_OD; GPIO_InitStruct.Pull = GPIO_NOPULL; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH; GPIO_InitStruct.Alternate = GPIO_AF4_I2C1; HAL_GPIO_Init(GPIOB, &GPIO_InitStruct); // 配置I2C中断 /* Peripheral clock enable */ __HAL_RCC_I2C1_CLK_ENABLE(); /* I2C1 interrupt Init */ HAL_NVIC_SetPriority(I2C1_EV_IRQn, 0, 0); // 事件中断(必须有) HAL_NVIC_EnableIRQ(I2C1_EV_IRQn); HAL_NVIC_SetPriority(I2C1_ER_IRQn, 0, 0); // 错误中断(非必须) HAL_NVIC_EnableIRQ(I2C1_ER_IRQn); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
3、配置I2C中断服务函数
参考代码:
注:这个代码可以用STM32CubeMX自动生成
// I2C1事件中断服务函数(必须有)
void I2C1_EV_IRQHandler(void)
{
HAL_I2C_EV_IRQHandler(&hi2c1);
}
// I2C1错误中断服务函数(非必须)
void I2C1_ER_IRQHandler(void)
{
HAL_I2C_ER_IRQHandler(&hi2c1);
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
4、配置I2C从机回调处理函数
参考代码:
static uint8_t ram[256]; // 模拟I2C从机数据寄存器(主机读写的数据都放在这块内存) uint8_t offset; // 从机寄存器当前偏移地址 static uint8_t first_byte_state = 1; // 是否收到第1个字节,也就是偏移地址(0:已收到,1:没有收到) // 侦听完成回调函数(完成一次完整的i2c通信以后会进入该函数) void HAL_I2C_ListenCpltCallback(I2C_HandleTypeDef *hi2c) { // 完成一次通信,清除状态 first_byte_state = 1; offset = 0; HAL_I2C_EnableListen_IT(hi2c); // slave is ready again } // I2C设备地址回调函数(地址匹配上以后会进入该函数) void HAL_I2C_AddrCallback(I2C_HandleTypeDef *hi2c, uint8_t TransferDirection, uint16_t AddrMatchCode) { if(TransferDirection == I2C_DIRECTION_TRANSMIT) {// 主机发送,从机接收 if(first_byte_state) {// 准备接收第1个字节数据 HAL_I2C_Slave_Seq_Receive_IT(hi2c, &offset, 1, I2C_NEXT_FRAME); // 每次第1个数据均为偏移地址 } } else {// 主机接收,从机发送 HAL_I2C_Slave_Seq_Transmit_IT(hi2c, &ram[offset], 1, I2C_NEXT_FRAME); // 打开中断并把ram[]里面对应的数据发送给主机 } } // I2C数据接收回调函数(在I2C完成一次接收时会关闭中断并调用该函数,因此在处理完成后需要手动重新打开中断) void HAL_I2C_SlaveRxCpltCallback(I2C_HandleTypeDef *hi2c) { if(first_byte_state) {// 收到的第1个字节数据(偏移地址) first_byte_state = 0; } else {// 收到的第N个字节数据 offset++; // 每收到一个数据,偏移+1 } // 打开I2C中断接收,下一个收到的数据将存放到ram[offset] HAL_I2C_Slave_Seq_Receive_IT(hi2c, &ram[offset], sizeof(ram), I2C_NEXT_FRAME); // 接收数据存到ram[]里面对应的位置 } // I2C数据发送回调函数(在I2C完成一次发送后会关闭中断并调用该函数,因此在处理完成后需要手动重新打开中断) void HAL_I2C_SlaveTxCpltCallback(I2C_HandleTypeDef *hi2c) { offset++; // 每发送一个数据,偏移+1 HAL_I2C_Slave_Seq_Transmit_IT(hi2c, &ram[offset], sizeof(ram), I2C_NEXT_FRAME); // 打开中断并把ram[]里面对应的数据发送给主机 }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
2.2 测试用例
1、测试方法
使用USB转I2C的工具接入到MCU的I2C上面,然后使用上位机工具进行读写操作,最后通过串口把I2C通讯过程中的几个重要节点打印出来,验证结果是否正确。
2、测试程序
其实和上面讲解的代码是一样的,只是初始化时先把ram[]赋初值。
参考测试代码:
#include "stm32f1xx_hal.h" static uint8_t ram[256]; // 模拟I2C从机数据寄存器(主机读写的数据都放在这块内存) uint8_t offset; // 从机寄存器当前偏移地址 static uint8_t first_byte_state = 1; // 是否收到第1个字节,也就是偏移地址(0:已收到,1:没有收到) // 侦听完成回调函数(完成一次完整的i2c通信以后会进入该函数) void HAL_I2C_ListenCpltCallback(I2C_HandleTypeDef *hi2c) { // 完成一次通信,清除状态 first_byte_state = 1; offset = 0; HAL_I2C_EnableListen_IT(hi2c); // slave is ready again } // I2C设备地址回调函数(地址匹配上以后会进入该函数) void HAL_I2C_AddrCallback(I2C_HandleTypeDef *hi2c, uint8_t TransferDirection, uint16_t AddrMatchCode) { if(TransferDirection == I2C_DIRECTION_TRANSMIT) {// 主机发送,从机接收 if(first_byte_state) {// 准备接收第1个字节数据 HAL_I2C_Slave_Seq_Receive_IT(hi2c, &offset, 1, I2C_NEXT_FRAME); // 每次第1个数据均为偏移地址 } } else {// 主机接收,从机发送 HAL_I2C_Slave_Seq_Transmit_IT(hi2c, &ram[offset], 1, I2C_NEXT_FRAME); // 打开中断并把ram[]里面对应的数据发送给主机 } } // I2C数据接收回调函数(在I2C完成一次接收时会关闭中断并调用该函数,因此在处理完成后需要手动重新打开中断) void HAL_I2C_SlaveRxCpltCallback(I2C_HandleTypeDef *hi2c) { if(first_byte_state) {// 收到的第1个字节数据(偏移地址) first_byte_state = 0; } else {// 收到的第N个字节数据 offset++; // 每收到一个数据,偏移+1 } // 打开I2C中断接收,下一个收到的数据将存放到ram[offset] HAL_I2C_Slave_Seq_Receive_IT(hi2c, &ram[offset], sizeof(ram), I2C_NEXT_FRAME); // 接收数据存到ram[]里面对应的位置 } // I2C数据发送回调函数(在I2C完成一次发送后会关闭中断并调用该函数,因此在处理完成后需要手动重新打开中断) void HAL_I2C_SlaveTxCpltCallback(I2C_HandleTypeDef *hi2c) { offset++; // 每发送一个数据,偏移+1 HAL_I2C_Slave_Seq_Transmit_IT(hi2c, &ram[offset], sizeof(ram), I2C_NEXT_FRAME); // 打开中断并把ram[]里面对应的数据发送给主机 } // 测试用例:初始化把ram设置为从0到255的数 void i2c_test(void) { for (uint16_t i = 0; i < 256; i++) { ram[i] = i; } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
3 运行测试
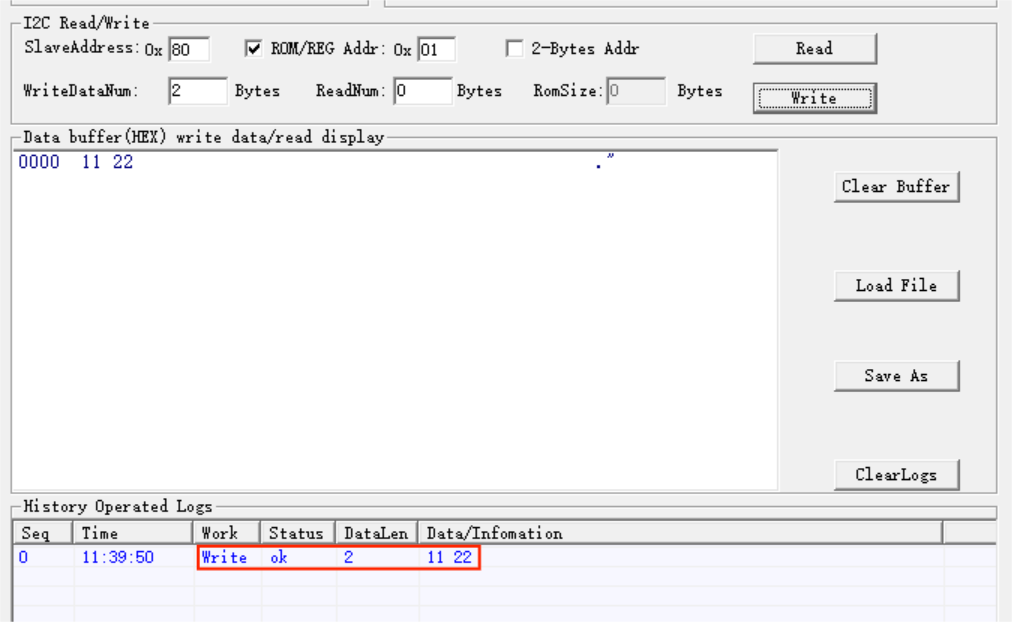
3.1 I2C连续写入
通过上位机工具写入:
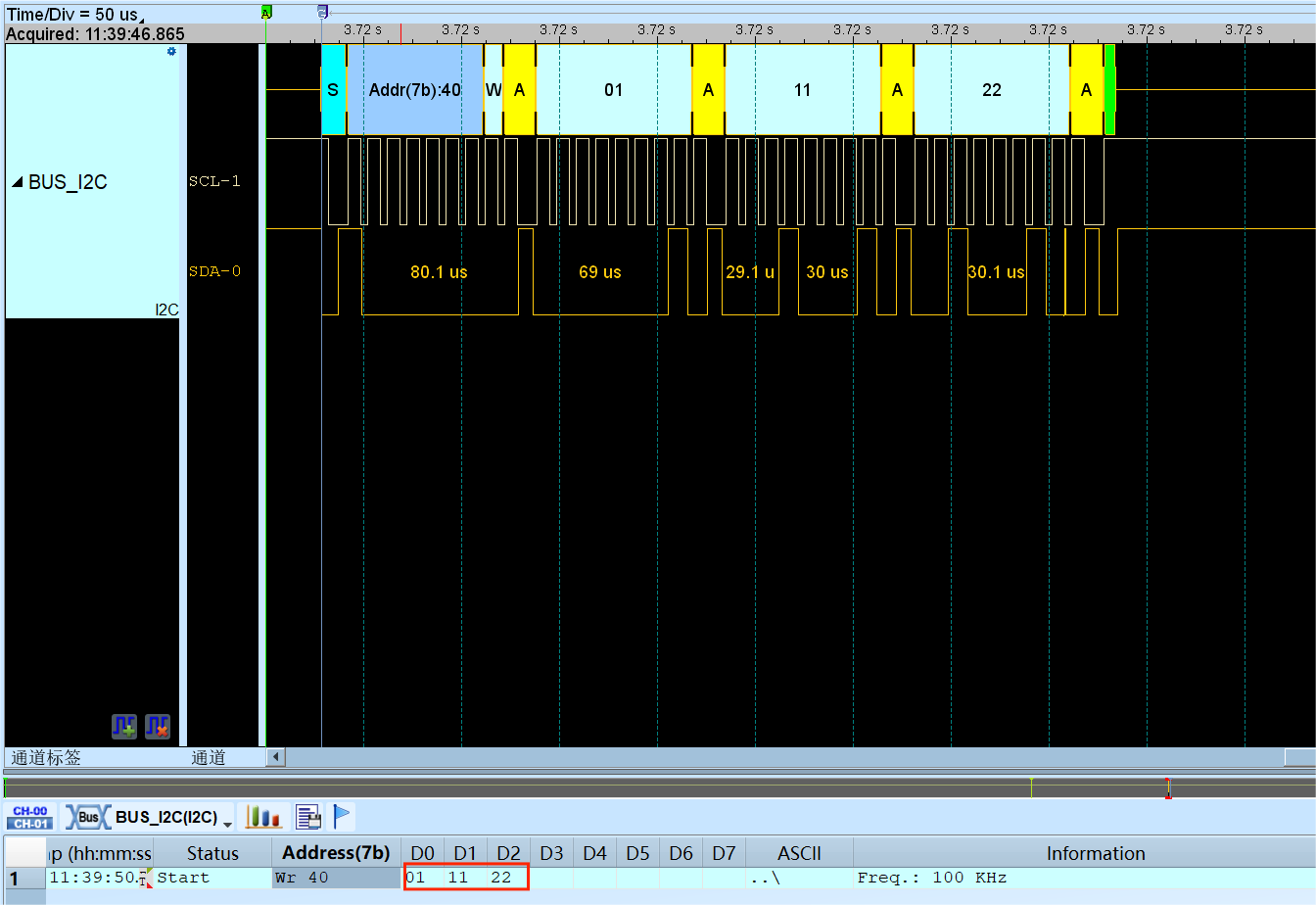
通过逻辑分析仪抓取波形:
3.2 I2C连续读取
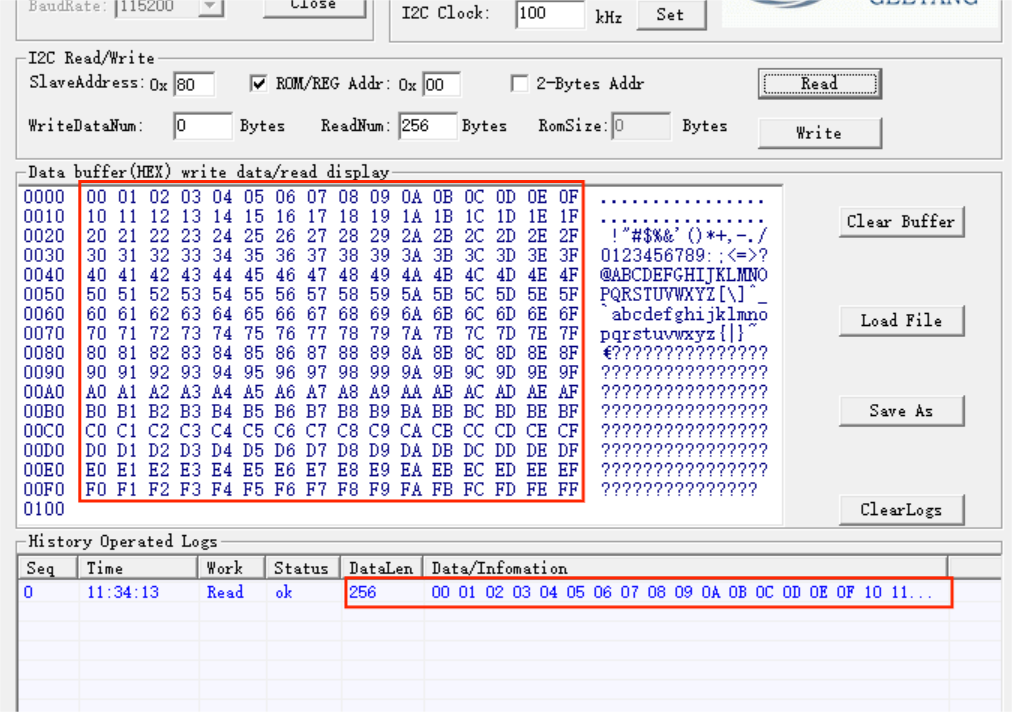
通过上位机工具连续读取256字节:
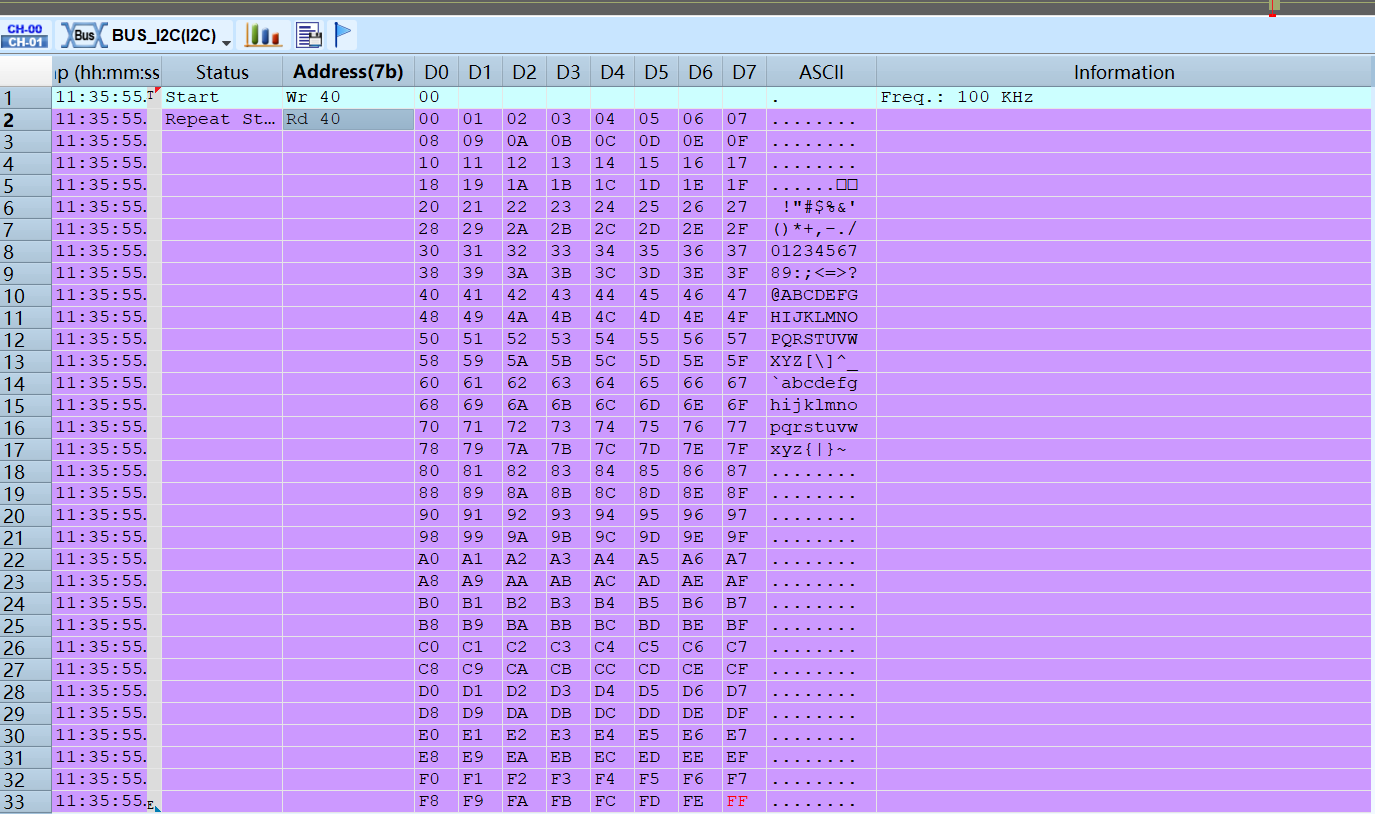
通过逻辑分析仪抓取波形:

3.3 I2C单次读写测试
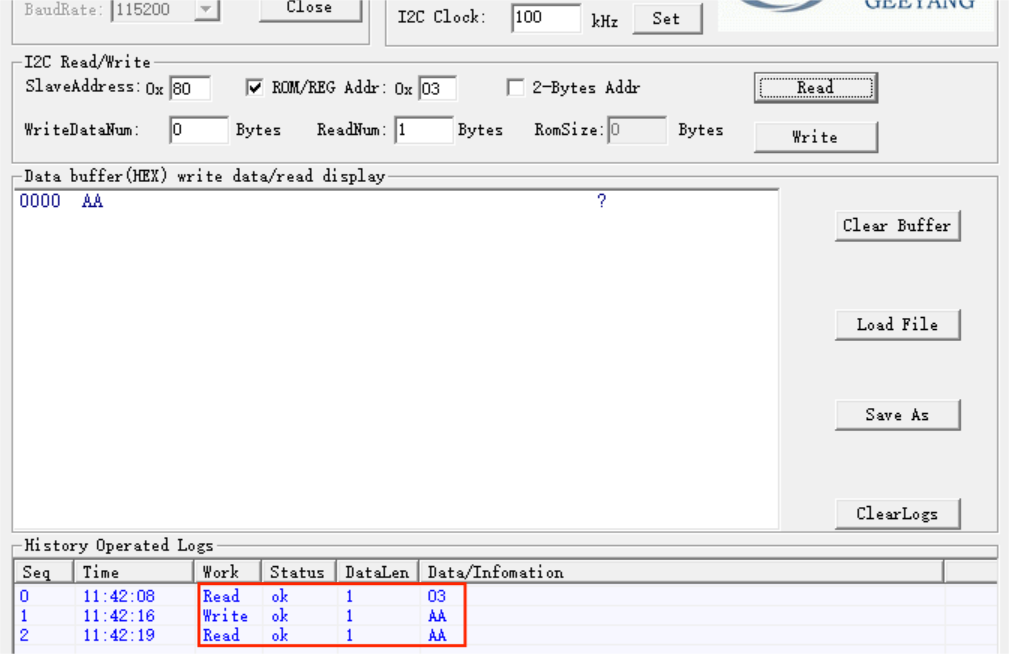
通过上位机工具读取原值,再写入新值,最后再读取新值:
通过逻辑分析仪抓取波形:

4 总结
通过上位机工具的测试以及逻辑分析仪的解析,STM32的硬件I2C从机通信正常且稳定,读写速度测试了100k和400k,没有发现问题,至此测试完成。
好了,关于STM32如何设置从机模式就介绍到这里,如果你们有什么问题,欢迎评论区留言。
需要完整源码工程的同学可以自行下载:源码下载地址
如果这篇文章能够帮到你,就…懂的。



