
- 1SpringCloud Alibaba【Nacos集群搭建(Windows+Linux)&Ribbon负载均衡】_windows本地可以连接linux的nacos吗
- 2DWS(GaussDB) 通信原理&问题排查笔记_为什么gaussdb不限制连接数
- 3Windows使用Telnet连接Linux服务器初探(待实践)
- 4Windows 10 安装 ADB (Android Debug Bridge,Android 调试桥)_windows adb
- 5【鸿蒙OS开发入门】16 - 重头搭建Ubuntu新环境编译OpenHarmony 3.0 LTS_harmony os 3.0 lts hb set [ohos info] env: ‘gencon
- 6Qt designer界面和所有组件功能的详细介绍(全!!!)_qt designer 的功能键如何找到,功能触发如何设置
- 7Huawei Cloud EulerOS 安装 MySQL8.0_huawei cloud euleros 安装mysql
- 8华为eNSP入门实验,Vlan配置,路由配置,用户模式,链路聚合
- 9Git实战(四)| Git分支管理实操,搞定在线合并和本地合并_git move or comit them before merge
- 10JavaScript 快速入门手册_js手册
对机械臂的轨迹规划以及加减速的学习_机械臂轨迹规划算法
赞
踩
对机械臂的轨迹规划以及加减速的学习
目录
1.轨迹规划
在机器人学中,轨迹是描述了操作臂在多维空间中的期望运动。
什么是轨迹规划呢?轨迹是指每个自由度的位置、速度、加速度的时间历程。这个问题包括如何通过人机交互制定通过空间的一条轨迹或路径。
在这里我们不要求用户写出复杂的时间和空间的函数来指定机器人任务,反而要使他们简单描述机器人的期望轨迹,之后由系统完成详细的计算。

在轨迹规划中,我们要找出各段的运动轨迹,从而控制我们的{T}坐标沿着我们所预定的轨迹行进,所以我们需要描述这个轨迹。
当我们将规划好的轨迹放在计算机中进行描述时,我们需要研究通过内部表达式来计算轨迹的问题。在很多情况下,我们要计算位置、速度、加速度的轨迹函数。因为这些轨迹点是由路径更新速率下进行计算的,在经典的操作臂系统中,路径更新速率在60Hz~2000Hz之间。

在大多数情况下,将操作臂的运动看作工具坐标系{T}相对于固定坐标系{S}的运动。用这种方法描述路径和生成路径会带来很多好处。当按照工具坐标系相对于固定坐标系的运动来指定路径时,它的内涵是将运动的描述与任何具体的机器人、末端执行器或工件相分离。这样就可以完成通用化的描述它可以应用到不同对象上面。在轨迹规划中,它的基本问题就是将操作臂从初始位置移动到某个最终期望位置。一般而言,运动包括工具相对于工作台的姿态变化和位置变化。
但是我们在进行运动时不能简单的指定最终的期望位形,有时我们还要在路径描述中加入一系列的期望中间点,这些点实际上都是确定工具相对于工作台的位置和姿态的坐标系。在很多时候,我们也期望要求操作臂的运动是平滑的,因为一些笨拙,急速的运动会加剧机构的磨损,所以我们要给他一些时间速度等的限定条件。
面对一个二自由度的机械臂,我们知道我们需要了解它实时的位置、速度、加速度,所以我们在这里需要讨论对关节空间的规划方法。我们可以应用逆运动学来求解出轨迹中各点对应的期望关节角,这样我们就得到了经过各中间点并且止于目标点的n个关节的平滑函数。所以说应用关节空间规划方法可以获得各中间点的期望位置和状态。

在进行关节空间的规划时,我们要研究用关节转角的函数来描述轨迹(在空间和时间)的轨迹生成方法。
在很多时候我们会使用三次多项式来描述一个机械臂的位置移动。由于我们需要确定一条光滑的运动曲线来确定运动,我们需要对其施加四个约束条件,分别是初始点和末端点的值需要知道,因为我们要保证关节速度连续,所以需要其速度也应该为零。
我们发现次数至少为三次的多项式才能满足四个约束条件,所以他们可以唯一确定一个三次多项式。

在关节坐标系下的轨迹规划。
步骤:
1.定义{T}相对于{G}的初始点,中间点以及末端点。
2.将他们用6个参数方式来表达
3.进行机器人逆运动学,将手臂端点状态转化到关节上
4.对于所有的关节进行规划
5.进行机器人正运动学,将关节状态下的姿态转移到手臂末端点的状态,检查末端点在笛卡尔坐标系下的可行性。
具有中间点的路径的三次多项式
通常,一旦具有了中间点,我们需要不停歇地经过每一个中间点。而每个中间点是用工具坐标系相对于固定坐标系的期望位置和姿态来确定的,我们需要算出每个中间件点的关节角,之后将这些平滑连接。




多段三次多项式
如果在每个中间点处都有期望的关节速度,那么可以简单的将上式应用到每个曲线段来求出所需要的三次多项式,但是我们如何选择速度呢?
1.直接定义
但是它不论在笛卡尔坐标系还是在关节坐标系都不建议,因为过于复杂尤其轨迹落在奇点时。
2.自动生成
如果速度在ti前后变号,选择速度为0。如果速度在ti前后同号,选择平均的速度。
用这两个方式,不同区段的三次多项式可以分开求解。
规划速度时加速度也是连续的,但是不同区段的三次多项式需要整合在一起,一并求解。
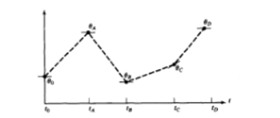
但是一般的轨迹中不一定只有一个点而是有N+1个点,分别是
N=1——初始点。
N=n-1——中间点。
N=n+1——末端点。
这样我们就会存在n个区段,由于每个区段我们可以用一个三次多项式表示出来,这样我们会出现4n个未知数需要进行求解。
由于我们知道每段开始与结束的位置,由于有N段这样我们列出2N个方程式;由于在此其中有n-1个中间点,我们还可以得出2*(n-1)个速度&加速度方程,这样就差两个方程式就可以求解这些数值。这俩个需要有这样:
1.自然状态下:初末两点的加速度均为零
2.设定初末速度为u与v
3.如果是周期运动,我们可以将初末速度一样,初末加速度一样。
法一:在用三次多项式在笛卡尔坐标系下进行轨迹规划。
1.求出几个自由度关节的三次多项式,找出所有的未知数。
2.对所有的未知数进行求解。
3.对所有的轨迹自由度进行规划。
4.进行逆运动学,找出各个关节的对应的轨迹。
5.将关节角带入手臂进行模拟。
法二:以三次多项式在关节坐标系下进行轨迹规划。
1.进行机器人逆运动学,求出初始点,中间点,末端点的角度。
2.求出在各个角度下的三次多项式。
3.对所有的自由度关节进行轨迹规划。
4.将关节角带入手臂进行模拟操作,确认是否一样。
如果我们要求更高的控制,需要对位置,速度,加速度都必须规划时,我们会使用五次多项式,它有6个未知数,其计算步骤和以前的一样。
之后我们进行使用抛物线混合线性函数
因为在许多类型任务下必须使用直线轨迹,但是如果轨迹中八廓多个直线轨迹,线段间的转折点速度不会连续。
我们一般会设置初末点的速度为0,但是在图像上如果单纯只有直线,则是不可能发生的,因为若只有直线,那么转折点的加速度将是无限大的。所以我们需要修正它。
解决方式:将直线段两端修正为二次方程式,使得速度曲线更加平滑。



于是我们可以对加速度进行状态讨论,当加速度为最小加速度时,t_b=t_f/2=t_h,此时无直线段,只有两个曲线段,同时两个曲线段长度相等。对于速度来说,速度是比原本无规划直接直线相连的速度的两倍。如果加速度小于最小加速度,他就会导致加速不足,无法达到正常的位置或速度不为0。

多段的抛物线混合线性函数
设定:中间有n个点。
方法:将每一个区段
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

