
热门标签
热门文章
- 1[论文总结] 智慧农业论文摘要阅读概览_derivation and validation of a total fruit and veg
- 2想找一个一起自学java的朋友_JAVA自学的朋友看过来
- 3arc engine 地图整饰的思路与流程_private void addlegend(ipagelayout pagelayout)
- 4从筛选简历和面试流程讲起,再给培训班出身的程序员一些建议
- 5重磅!Stable Diffusion 3 发布,AI模型百花争鸣!
- 6哈希,LeetCode 2007. 从双倍数组中还原原数组
- 7FreeSWITCH 1.10.10 简单图形化界面12 - 注册IMS_代拨号码
- 8华为OD机试 - 火星文计算(Python)_华为od机试真题python实现【火星文计算
- 9低代码数据可视化GoView项目的初体验
- 10【MySQL】Docker运行以及用户操作_docker 指定用户运行mysq
当前位置: article > 正文
【STM32+HAL】姿态传感器陀螺仪MPU6050模块_stm32 hal mpu6050
作者:不正经 | 2024-04-22 06:10:46
赞
踩
stm32 hal mpu6050
一、准备工作
有关OLED屏初始化的问题,详见【STM32+HAL】OLED显示初始化配置
二、所用工具
1、芯片:STM32F10C8T6
2、CUBEMX配置软件
3、 6 轴运动处理组件MPU6050
三、实现功能
OLED屏显示姿态角
四、HAL配置步骤
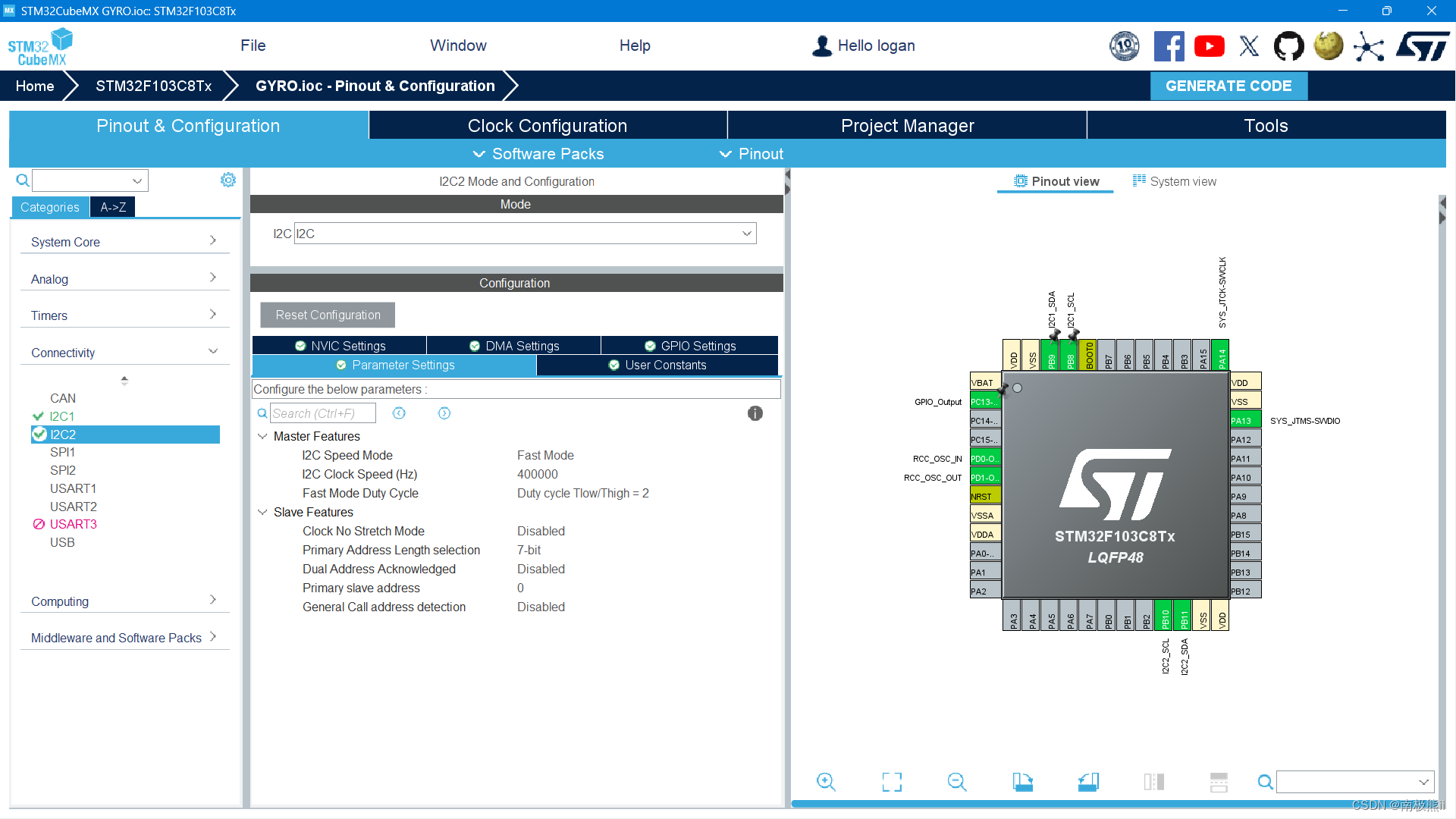
1、开启I2C1进行MPU6050通信

2、开启I2C2进行OLED屏配置
3、开启定时器1
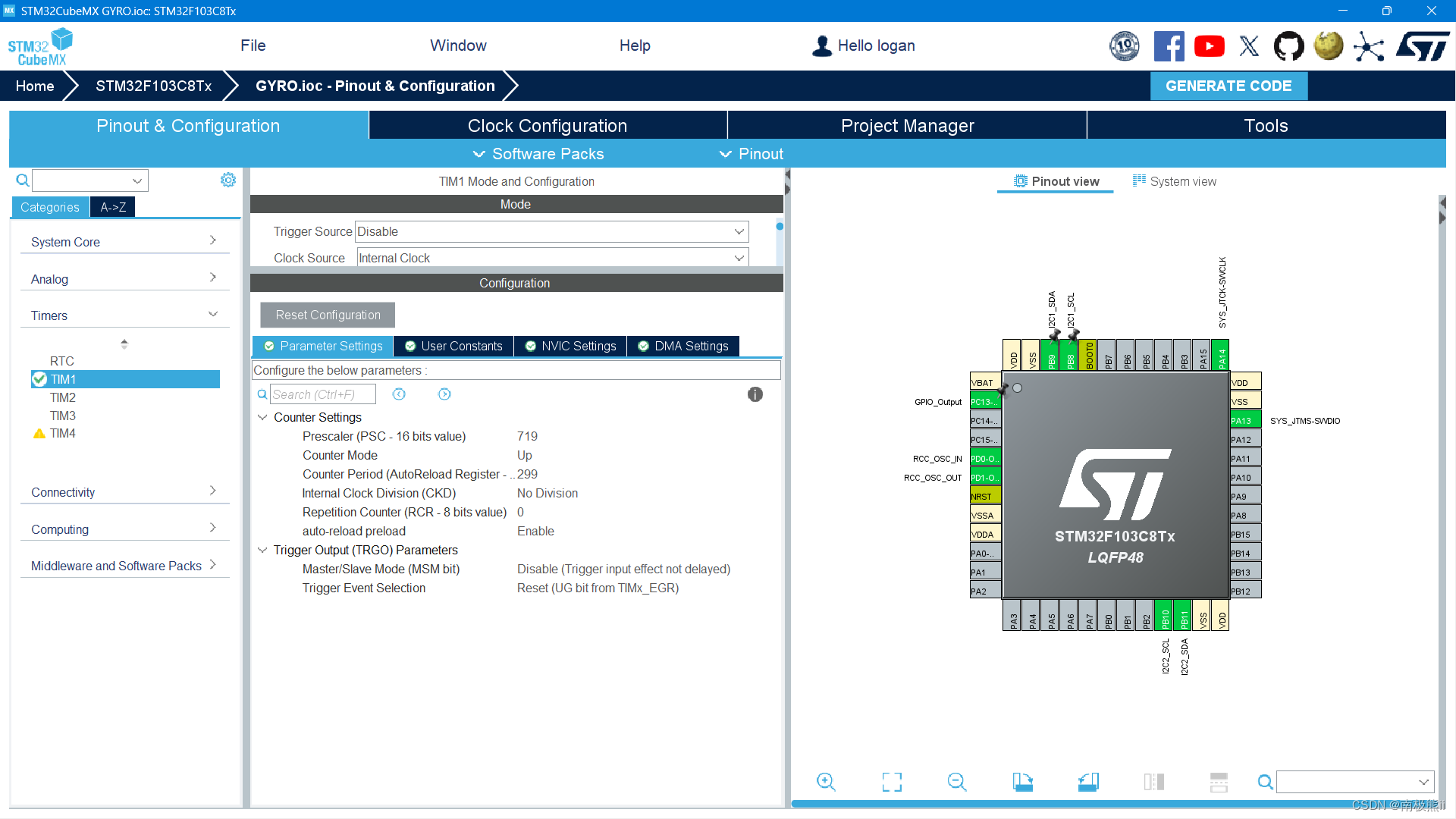
至此,CUBEMX配置完成
五、巨人之肩
实际原理与代码讲解见:
基于STM32的四旋翼无人机项目(二):MPU6050姿态解算(含上位机3D姿态显示教学)
六、源码提供
推荐阅读
相关标签

