
热门标签
热门文章
- 1Java面向对象——图书管理系统(小白也能看的懂!)_java图书馆管理系统面向对象
- 2OpenSSL SSL_connect: Connection was reset in connection to github.com:443
- 3ChatGPT免费 | 8个免费使用GPT-4的方法_chatgpt4 免费csdn
- 4计算机视觉:使用opencv实现车牌识别_opencv车牌识别
- 5MYSQL关闭SSL的方法分享
- 6数素数个数 1-PTA_素数是指除了1和本身之外没有因子的正整数(比如,11是素数,15不是素数,2是素数,1不
- 7计算机毕业设计 jsp校园OTO超市系统ssm 毕设
- 8【git】 ssh拉代码,为何出现timeout链接超时?_git ssl connection timeout
- 9sqoop 从 MySQL 导入数据到 hdfs 中_sqoop从关系型数据库mysql导入数据到hdfs时,默认的字段分隔符是()
- 10pelco协议及其实现的简单认识_c#派尔高
当前位置: article > 正文
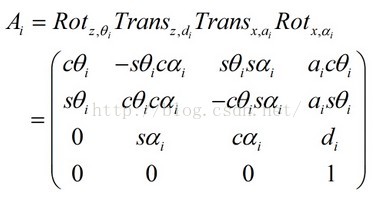
DH参数法建立机器人的运动学正解_dh法建立机器人运动学方程
作者:不正经 | 2024-05-07 19:29:01
赞
踩
dh法建立机器人运动学方程
DH参数法建立机器人的运动学正解
推荐阅读
相关标签

