
热门标签
热门文章
- 1正则表达式的编译---compile()函数_cocos 正则表达式
- 2Docker笔记3 | 在Ubuntu下安装Docker_docker下载 ubuntu
- 3怎么关闭电脑开机自动启动的程序_电脑开机黑屏启动不了怎么办?几招助你轻松解决...
- 4Linux:系统安全及应用
- 5chroma 向量库使用;查询、更新与插入_chroma如何更新库
- 6浅谈 HTTP协议(url/请求/响应/get/post)_post url上参数叫什么协议
- 7【数据结构】顺序表和链表_链式列表和顺序表
- 8身份认证技术
- 9FlinkDataStream-Source_flink datastreamsource
- 10Linux系统基础命令 用户名 内核版本 修改网卡IP配置_route-ens33
当前位置: article > 正文
Dijkstra算法求最短路_叙述求解最短路的dijkstra算法基本过程
作者:不正经 | 2024-06-13 05:34:53
赞
踩
叙述求解最短路的dijkstra算法基本过程
一.算法描述
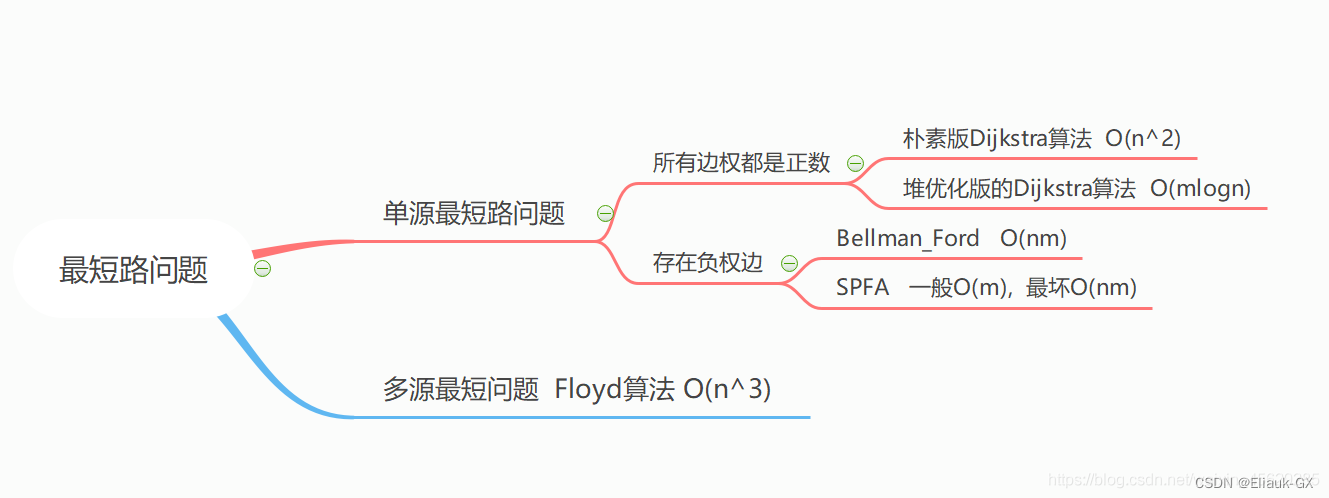
Dijkstra算法的流程如下:
1.初始化dist[1] = 0,其余节点的dist值为无穷大。
2.找出一个未被标记的、dist[x]最小的节点x,然后标记节点x。
3.扫描节点x的所有出边(x,y,z),若dist[y] > dist[x] + z,则使用dist[x] + z更新dist[y]。
4.重复上述2~3两个步骤,直到所有的节点都被标记。
Dijkstra算法基于贪心思想,它只适用于所有边的长度都是非负整数的图。当边长都是负数时,全局的最小值不可能在被其他节点更新,故在第一步中选出的节点x必然满足:dist[x]已经是起点到x的最短路径。我们不断选择全局最小值进行标记和扩展,最终得到起点1到每个节点的最短路径长度。
二.算法应用
例:对于如下有向图求1 号点到 4 号点的最短距离
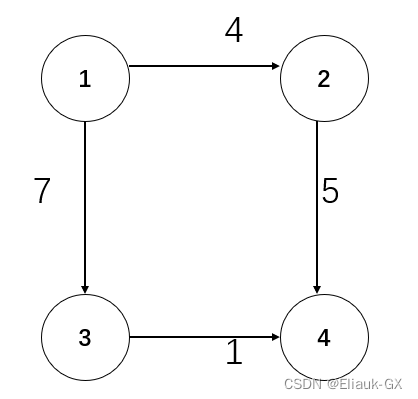
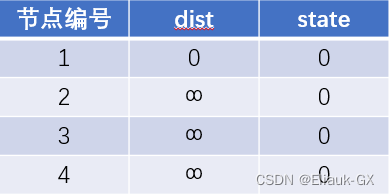
(1).初始状态原点到1号的距离为0,因此dist[1] = 0
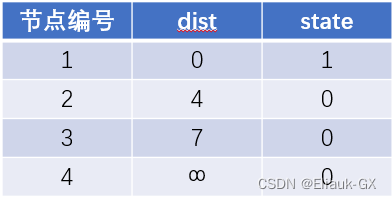
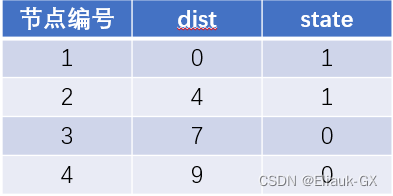
(2).遍历dist数组找到当前距离原点最近的点i并将该点进行标记,用找到的点i更新i能到的所有点的距离j,如果 dist[j] 大于 dist[i] 加上 i -> j 的距离,即 dist[j] > dist[i] + w[i][j](w[i][j] 为 i -> j 的距离) ,则更新 dist[j] = dist[i] + w[i][j]
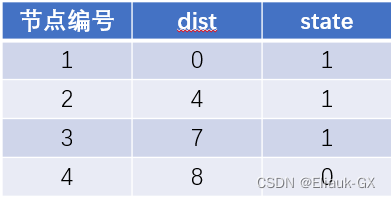
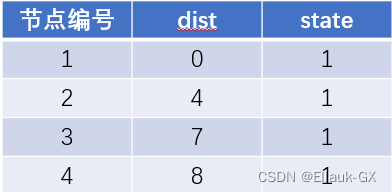
(3).重复步骤(2),直到所有的点都被标记为1
三.代码示例
#include <iostream> #include <cstring> #include <algorithm> using namespace std; const int N = 510; int g[N][N], dist[N]; int n, m; bool st[N]; int dijkstra() { dist[1] = 0; for(int i = 0; i < n; i++) { int t = -1; //找到未标记节点中dist最小的 for(int j = 1; j <= n; j++) if(!st[j] && (t == -1 || dist[j] < dist[t])) t = j; st[t] = true; //用全局最小的值点t更新其他点 for(int j = 1; j <= n; j++) dist[j] = min(dist[j], dist[t] + g[t][j]); } if(dist[n] == 0x3f3f3f3f) return -1; return dist[n]; } int main() { memset(dist, 0x3f, sizeof dist); //构建邻接矩阵 memset(g, 0x3f, sizeof g); cin >> n >> m; for(int i = 0; i < m; i++) { int x, y, z; cin >> x >> y >> z; g[x][y] = min(g[x][y], z); } //求单源最短路径 dijkstra(); for(int i = 1; i <= n; i++) printf("%d\n", dist[i]); return 0; }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
四.算法改进
Dijkstra算法的时间复杂度为O(n^2),主要的瓶颈在于第一步的寻找全局最小值的过程。可以用二叉堆(C++ STL priority_queue)对dist数组进行维护,用O(longn)的时间获取最小值并从堆中删除。用O(longn)的时间执行一条边的扩展和更新,最终可在O(mlongn)的时间内实现Dijkstra算法。
堆优化版的Dijkstra算法
#include <iostream> #include <cstring> #include <algorithm> #include <queue> #include <vector> #define x first #define y second using namespace std; const int N = 2e5 + 10; typedef pair<int, int> PII; int n, m; int h[N], e[N], ne[N], w[N], idx; //邻接表 int dist[N]; bool st[N]; //标记数组 //构建邻接表 void add(int a, int b,int c) { e[idx] = b, ne[idx] = h[a], w[idx] = c, h[a] = idx++; } int dijkstra() { memset(dist, 0x3f, sizeof dist); dist[1] = 0; //pair的第一维为当前节点到原点的最短距离,第二维为节点编号 priority_queue<PII, vector<PII>, greater<PII>> heap; heap.push({dist[1], 1}); while(heap.size()) { //取出堆顶 auto k = heap.top(); heap.pop(); int ver = k.y, distance = k.x; if(st[ver]) continue; st[ver] = true; //扫描所有出边 for(int i = h[ver]; i != -1; i = ne[i]) { int j = e[i]; if(dist[j] > distance + w[i]) { //更新,把新的二元组插入堆 dist[j] = distance + w[i]; heap.push({dist[j], j}); } } } if(dist[n] == 0x3f3f3f3f) return -1; return dist[n]; } int main() { cin >> n >> m; memset(h, -1, sizeof h); //构建邻接表 for(int i = 0; i < m; i++) { int a, b, c; cin >> a >> b >> c; add(a, b, c); } cout << dijkstra(); return 0; } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/不正经/article/detail/711101
推荐阅读
相关标签

