
- 1成佩涛——iPviking:在线黑客攻击可视化地图
- 2C#中HttpWebRequest、WebClient、HttpClient的使用详解
- 3HBase的安装_csdnhbase数据库的安装
- 4AI绘画Stable Diffusion神级插件!sd-forge-layerdiffuse_layerdiffuse stable diffusion
- 5微生物群落构建(community assembly)_tnst 群落
- 6最全个人MBTI性格分析和五大性格特质_善于总结内省mbti,2024年最新字节跳动面试真题_最好的性格mbti
- 7git push后的撤销操作_git push倒回
- 8自定义View学习总结_自定义view的三个方法
- 9django DRF增删改查
- 10Redis数据迁移-RedisShake_redis shake
【Spark精讲】一文搞懂Spark分区器Partitioner_spark 分区器
赞
踩
Spark RDD的宽依赖中存在Shuffle过程,Spark的Shuffle过程同MapReduce,也依赖于Partitioner数据分区器,Partitioner类的代码依赖结构主要如下所示:
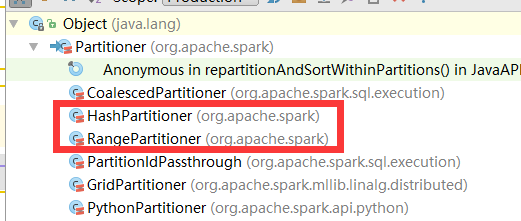
主要是HashPartitioner和RangePartitioner两个类,分别用于根据RDD中key的hashcode值进行分区以及根据范围进行数据分区
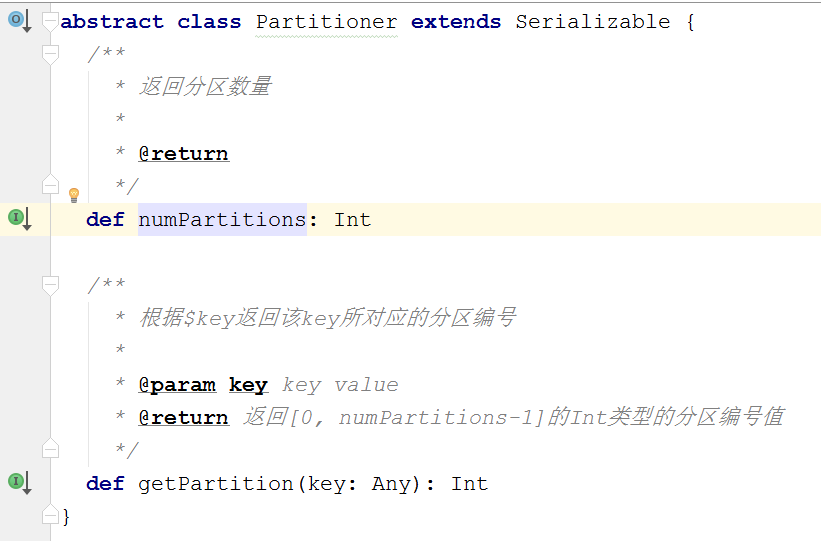
一、Partitioner
Spark中数据分区的主要工具类(数据分区类),主要用于Spark底层RDD的数据重分布的情况中,主要方法两个,如下:
二、HashPartitioner
Spark中非常重要的一个分区器,也是默认分区器,默认用于90%以上的RDD相关API上;功能:依据RDD中key值的hashCode的值将数据取模后得到该key值对应的下一个RDD的分区id值,支持key值为null的情况,当key为null的时候,返回0;该分区器基本上适合所有RDD数据类型的数据进行分区操作;但是需要注意的是,由于JAVA中数组的hashCode是基于数组对象本身的,不是基于数组内容的,所以如果RDD的key是数组类型,那么可能导致数据内容一致的数据key没法分配到同一个RDD分区中,这个时候最好自定义数据分区器,采用数组内容进行分区或者将数组的内容转换为集合。HashPartitioner代码说明如下:

三、RangePartitioner
SparkCore中除了HashPartitioner分区器外,另外一个比较重要的已经实现的分区器,主要用于RDD的数据排序相关API中,比如sortByKey底层使用的数据分区器就是RangePartitioner分区器;该分区器的实现方式主要是通过两个步骤来实现的,第一步:先重整个RDD中抽取出样本数据,将样本数据排序,计算出每个分区的最大key值,形成一个Array[KEY]类型的数组变量rangeBounds;第二步:判断key在rangeBounds中所处的范围,给出该key值在下一个RDD中的分区id下标;该分区器要求RDD中的KEY类型必须是可以排序的,代码说明如下:
-
- class RangePartitioner[K: Ordering : ClassTag, V](
- partitions: Int,
- rdd: RDD[_ <: Product2[K, V]],
- private var ascending: Boolean = true)
- extends Partitioner {
-
- // We allow partitions = 0, which happens when sorting an empty RDD under the default settings.
- require(partitions >= 0, s"Number of partitions cannot be negative but found $partitions.")
-
- // 获取RDD中key类型数据的排序器
- private var ordering = implicitly[Ordering[K]]
-
- // An array of upper bounds for the first (partitions - 1) partitions
- private var rangeBounds: Array[K] = {
- if (partitions <= 1) {
- // 如果给定的分区数是一个的情况下,直接返回一个空的集合,表示数据不进行分区
- Array.empty
- } else {
- // This is the sample size we need to have roughly balanced output partitions, capped at 1M.
- // 给定总的数据抽样大小,最多1M的数据量(10^6),最少20倍的RDD分区数量,也就是每个RDD分区至少抽取20条数据
- val sampleSize = math.min(20.0 * partitions, 1e6)
- // Assume the input partitions are roughly balanced and over-sample a little bit.
- // 计算每个分区抽取的数据量大小, 假设输入数据每个分区分布的比较均匀
- // 对于超大数据集(分区数超过5万的)乘以3会让数据稍微增大一点,对于分区数低于5万的数据集,每个分区抽取数据量为60条也不算多
- val sampleSizePerPartition = math.ceil(3.0 * sampleSize / rdd.partitions.size).toInt
- // 从rdd中抽取数据,返回值:(总rdd数据量, Array[分区id,当前分区的数据量,当前分区抽取的数据])
- val (numItems, sketched) = RangePartitioner.sketch(rdd.map(_._1), sampleSizePerPartition)
- if (numItems == 0L) {
- // 如果总的数据量为0(RDD为空),那么直接返回一个空的数组
- Array.empty
- } else {
- // If a partition contains much more than the average number of items, we re-sample from it
- // to ensure that enough items are collected from that partition.
- // 计算总样本数量和总记录数的占比,占比最大为1.0
- val fraction = math.min(sampleSize / math.max(numItems, 1L), 1.0)
- // 保存样本数据的集合buffer
- val candidates = ArrayBuffer.empty[(K, Float)]
- // 保存数据分布不均衡的分区id(数据量超过fraction比率的分区)
- val imbalancedPartitions = mutable.Set.empty[Int]
- // 计算抽取出来的样本数据
- sketched.foreach { case (idx, n, sample) =>
- if (fraction * n > sampleSizePerPartition) {
- // 如果fraction乘以当前分区中的数据量大于之前计算的每个分区的抽象数据大小,那么表示当前分区抽取的数据太少了,该分区数据分布不均衡,需要重新抽取
- imbalancedPartitions += idx
- } else {
- // 当前分区不属于数据分布不均衡的分区,计算占比权重,并添加到candidates集合中
- // The weight is 1 over the sampling probability.
- val weight = (n.toDouble / sample.size).toFloat
- for (key <- sample) {
- candidates += ((key, weight))
- }
- }
- }
-
- // 对于数据分布不均衡的RDD分区,重新进行数据抽样
- if (imbalancedPartitions.nonEmpty) {
- // Re-sample imbalanced partitions with the desired sampling probability.
- // 获取数据分布不均衡的RDD分区,并构成RDD
- val imbalanced = new PartitionPruningRDD(rdd.map(_._1), imbalancedPartitions.contains)
- // 随机种子
- val seed = byteswap32(-rdd.id - 1)
- // 利用rdd的sample抽样函数API进行数据抽样
- val reSampled = imbalanced.sample(withReplacement = false, fraction, seed).collect()
- val weight = (1.0 / fraction).toFloat
- candidates ++= reSampled.map(x => (x, weight))
- }
-
- // 将最终的抽样数据计算出rangeBounds出来
- RangePartitioner.determineBounds(candidates, partitions)
- }
- }
- }
-
- // 下一个RDD的分区数量是rangeBounds数组中元素数量+ 1个
- def numPartitions: Int = rangeBounds.length + 1
-
- // 二分查找器,内部使用java中的Arrays类提供的二分查找方法
- private var binarySearch: ((Array[K], K) => Int) = CollectionsUtils.makeBinarySearch[K]
-
- // 根据RDD的key值返回对应的分区id。从0开始
- def getPartition(key: Any): Int = {
- // 强制转换key类型为RDD中原本的数据类型
- val k = key.asInstanceOf[K]
- var partition = 0
- if (rangeBounds.length <= 128) {
- // If we have less than 128 partitions naive search
- // 如果分区数据小于等于128个,那么直接本地循环寻找当前k所属的分区下标
- while (partition < rangeBounds.length && ordering.gt(k, rangeBounds(partition))) {
- partition += 1
- }
- } else {
- // Determine which binary search method to use only once.
- // 如果分区数量大于128个,那么使用二分查找方法寻找对应k所属的下标;
- // 但是如果k在rangeBounds中没有出现,实质上返回的是一个负数(范围)或者是一个超过rangeBounds大小的数(最后一个分区,比所有数据都大)
- partition = binarySearch(rangeBounds, k)
- // binarySearch either returns the match location or -[insertion point]-1
- if (partition < 0) {
- partition = -partition - 1
- }
- if (partition > rangeBounds.length) {
- partition = rangeBounds.length
- }
- }
-
- // 根据数据排序是升序还是降序进行数据的排列,默认为升序
- if (ascending) {
- partition
- } else {
- rangeBounds.length - partition
- }
- }
其实RangePartitioner的重点是在于构建rangeBounds数组对象,主要步骤是:
1. 如果分区数量小于2或者rdd中不存在数据的情况下,直接返回一个空的数组,不需要计算range的边界;如果分区数据大于1的情况下,而且rdd中有数据的情况下,才需要计算数组对象
2. 计算总体的数据抽样大小sampleSize,计算规则是:至少每个分区抽取20个数据或者最多1M的数据量
3. 根据sampleSize和分区数量计算每个分区的数据抽样样本数量sampleSizePrePartition
4. 调用RangePartitioner的sketch函数进行数据抽样,计算出每个分区的样本
5. 计算样本的整体占比以及数据量过多的数据分区,防止数据倾斜
6. 对于数据量比较多的RDD分区调用RDD的sample函数API重新进行数据抽取
7. 将最终的样本数据通过RangePartitoner的determineBounds函数进行数据排序分配,计算出rangeBounds
RangePartitioner的sketch函数的作用是对RDD中的数据按照需要的样本数据量进行数据抽取,主要调用SamplingUtils类的reservoirSampleAndCount方法对每个分区进行数据抽取,抽取后计算出整体所有分区的数据量大小;reservoirSampleAndCount方法的抽取方式是先从迭代器中获取样本数量个数据(顺序获取), 然后对剩余的数据进行判断,替换之前的样本数据,最终达到数据抽样的效果
RangePartitioner的determineBounds函数的作用是根据样本数据记忆权重大小确定数据边界, 代码注释讲解如下:
- def determineBounds[K: Ordering : ClassTag](
- candidates: ArrayBuffer[(K, Float)],
- partitions: Int): Array[K] = {
- val ordering = implicitly[Ordering[K]]
- // 按照数据进行数据排序,默认升序排列
- val ordered = candidates.sortBy(_._1)
- // 获取总的样本数量大小
- val numCandidates = ordered.size
- // 计算总的权重大小
- val sumWeights = ordered.map(_._2.toDouble).sum
- // 计算步长
- val step = sumWeights / partitions
- var cumWeight = 0.0
- var target = step
- val bounds = ArrayBuffer.empty[K]
- var i = 0
- var j = 0
- var previousBound = Option.empty[K]
- while ((i < numCandidates) && (j < partitions - 1)) {
- // 获取排序后的第i个数据及权重
- val (key, weight) = ordered(i)
- // 累计权重
- cumWeight += weight
- if (cumWeight >= target) {
- // Skip duplicate values.
- // 权重已经达到一个步长的范围,计算出一个分区id的值
- if (previousBound.isEmpty || ordering.gt(key, previousBound.get)) {
- // 上一个边界值为空,或者当前边界key数据大于上一个边界的值,那么当前key有效,进行计算
- // 添加当前key到边界集合中
- bounds += key
- // 累计target步长界限
- target += step
- // 分区数量加1
- j += 1
- // 上一个边界的值重置为当前边界的值
- previousBound = Some(key)
- }
- }
- i += 1
- }
- // 返回结果
- bounds.toArray
- }
四、总结
一般而已,使用默认的HashPartitioner即可,RangePartitioner的使用有一定的局限性

