
- 1机器人近期最重要的论文之一 RT-2: Vision-Language-Action Models Transfer Web Knowledge to Robotic Control
- 2Covalent Network(CXT)通过社区投票将代币迁移并更名为 CXT,以推动人工智能更深层次的创新
- 3[转]sshd_config 中文手册
- 4未来30年,银发经济市场将会迎来黄金发展期
- 5flink 关于何时编写分配watermark_flink 事件窗口是先定义watermark还是先分组
- 6SRC实战 | 小白SRC找到的第一个SQL注入_srcsql经验
- 7如何看待国内PMP考试通过率高达97%?_大企业考pmp的比例
- 8【LeetCode】每日一题(十二)9. 回文数 反转一半数字 / 转为字符串双指针比较_revertednumber = revertednumber * 10 + x % 10;
- 9java文件操作报错:java.io.FileNotFoundException_java 文件拒绝访问
- 10【高效开发工具系列】eclipse部署web项目_eclipse开发工具介绍
ROS高效进阶第六章 -- 机器人SLAM建图与自主导航之move_base_slam自主导航
赞
踩
1 背景资料
本文是机器人SLAM建图与自主导航的第三篇文章,我们将基于之前ROS高效进阶第六章 – 机器人SLAM建图与自主导航之gmapping算法的 mbot_navigation 样例进行扩充,使用 ros 的 move_base 导航与路径规划包,在有地图和没地图两种情况下,控制轮式机器人探索整个屋子。本文的测试环境是ubuntu20.04 + ros noetic。
本文参考资料如下:
(1)《ROS机器人开发实践》胡春旭 第9章
(2)ROS高效进阶第六章 – 机器人SLAM建图与自主导航之gmapping算法
(3)ROS高效进阶第六章 – Ros Action通信机制
(4)Turtlebot的建图导航之旅(宝藏文章)
(5)ROS move_base
(6)ROS Amcl
(7)ROS Navigation
(8)amcl的原理,可参考《概率机器人》
2 正文
2.1 move_base导航规划框架
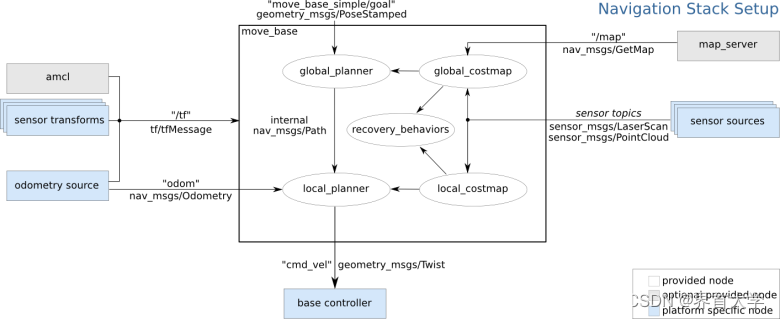
(1)下面的图是move_base导航规划框架,中间白色框内是move_base,左右两边是它的依赖,蓝色图框是必须依赖,灰色图框是可选依赖。下面是它的输出,也就是经典的/cmd_vel topic,发送给机器人控制器。
安装 ros navigation包:
sudo apt-get install ros-noetic-navigation
- 1
(2)move_base依赖 lidar 识别周边环境,依赖里程计确定自己的方位。但 move_base 并不强依赖map_server的全局地图,没有地图也可以边建图边导航。如果move_base 使用了全局地图,就需要使用amcl(Adaptive Monte Carlo Localization,自适应蒙特卡罗定位)进行自身地位,确定自身在全局地图中的位置。
(3)一个机器人从起点到终点需要解决两个问题,一是路由/路线导航,二是轨迹规划。前者对应move_base的global planner,使用经典的Dijkstra或A*算法;后者对应move_base的local_planner,使用Trajectory Rollout 和 Dynamic Window Approaches。
除此之外,recovery_vehaviors是move_base的脱困功能,在机器人卡死后,进行自主脱困。
(4)在自动驾驶领域,路线导航由导航模块依赖车载地图完成。轨迹规划依赖planning模块,这是自动驾驶领域的关键,其使用路径-速度解耦规划算法,Lattice规划算法等。
(5)如果想系统的学习move_base导航规划框架,这里推荐一个宝藏博客:Turtlebot的建图导航之旅(宝藏文章)。如果想更深入学习,请去ros网站学习,链接在第一章。
2.2 mbot_navigation 样例
(1)创建相关launch文件,和控制程序文件(cpp,py各一份)
cd ~/catkin_ws/src/mbot_navigation
mkdir scritps
touch launch/amcl.launch launch/move_base.launch
touch launch/navigation_with_map.launch launch/navigation_with_gmapping.launch
touch src/exploring_house.cpp scripts/exploring_house.py
- 1
- 2
- 3
- 4
- 5
(2)amcl.launch(所有参数一律来自官方样例)
<launch> <arg name="scan_topic" default="scan"/> <arg name="initial_pose_x" default="0.0"/> <arg name="initial_pose_y" default="0.0"/> <arg name="initial_pose_a" default="0.0"/> <node pkg="amcl" type="amcl" name="amcl" clear_params="true"> <param name="min_particles" value="500"/> <param name="max_particles" value="3000"/> <param name="kld_err" value="0.02"/> <param name="update_min_d" value="0.20"/> <param name="update_min_a" value="0.20"/> <param name="resample_interval" value="1"/> <param name="transform_tolerance" value="0.5"/> <param name="recovery_alpha_slow" value="0.00"/> <param name="recovery_alpha_fast" value="0.00"/> <param name="initial_pose_x" value="$(arg initial_pose_x)"/> <param name="initial_pose_y" value="$(arg initial_pose_y)"/> <param name="initial_pose_a" value="$(arg initial_pose_a)"/> <param name="gui_publish_rate" value="50.0"/> <remap from="scan" to="$(arg scan_topic)"/> <param name="laser_max_range" value="3.5"/> <param name="laser_max_beams" value="180"/> <param name="laser_z_hit" value="0.5"/> <param name="laser_z_short" value="0.05"/> <param name="laser_z_max" value="0.05"/> <param name="laser_z_rand" value="0.5"/> <param name="laser_sigma_hit" value="0.2"/> <param name="laser_lambda_short" value="0.1"/> <param name="laser_likelihood_max_dist" value="2.0"/> <param name="laser_model_type" value="likelihood_field"/> <param name="odom_model_type" value="diff"/> <param name="odom_alpha1" value="0.1"/> <param name="odom_alpha2" value="0.1"/> <param name="odom_alpha3" value="0.1"/> <param name="odom_alpha4" value="0.1"/> <param name="odom_frame_id" value="odom"/> <param name="base_frame_id" value="base_footprint"/> </node> </launch>

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
(2)move_base.launch如下,里面的配置参数文件来自官方样例,见:mbot_navigation
<launch>
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen" clear_params="true">
<param name="base_local_planner" value="dwa_local_planner/DWAPlannerROS" />
<rosparam file="$(find mbot_navigation)/config/move_base/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find mbot_navigation)/config/move_base/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find mbot_navigation)/config/move_base/local_costmap_params.yaml" command="load" />
<rosparam file="$(find mbot_navigation)/config/move_base/global_costmap_params.yaml" command="load" />
<rosparam file="$(find mbot_navigation)/config/move_base/move_base_params.yaml" command="load" />
<rosparam file="$(find mbot_navigation)/config/move_base/dwa_local_planner_params.yaml" command="load" />
</node>
</launch>
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
(3)navigation_with_map.launch实现了在有全局地图下的导航和规划
<launch> <!-- 设置地图的配置文件 --> <arg name="map" default="gmapping_save.yaml" /> <!-- 运行地图服务器,并且加载设置的地图--> <node name="map_server" pkg="map_server" type="map_server" args="$(find mbot_navigation)/maps/$(arg map)"/> <!-- 运行move_base节点 --> <include file="$(find mbot_navigation)/launch/move_base.launch"/> <!-- 启动AMCL节点 --> <include file="$(find mbot_navigation)/launch/amcl.launch" /> <!-- 运行rviz --> <node pkg="rviz" type="rviz" name="rviz" args="-d $(find mbot_navigation)/rviz/navigation.rviz"/> </launch>
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
(4)navigation_with_gmapping.launch实现了无全局地图下的导航和规划
<launch>
<include file="$(find mbot_navigation)/launch/gmapping.launch"/>
<!-- 运行move_base节点 -->
<include file="$(find mbot_navigation)/launch/move_base.launch" />
<!-- 运行rviz -->
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find mbot_navigation)/rviz/navigation.rviz"/>
</launch>
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
(5)exploring_house.cpp作为move_base action服务的客户端,用来向move_base发送目标点。ros action的原理和使用方法见:ROS高效进阶第六章 – Ros Action通信机制
#include <ros/ros.h> #include <list> #include <geometry_msgs/Pose.h> #include <move_base_msgs/MoveBaseAction.h> #include <actionlib/client/simple_action_client.h> geometry_msgs::Pose createPose(double px, double py, double pz, double ox, double oy, double oz, double ow) { geometry_msgs::Pose pose; pose.position.x = px; pose.position.y = py; pose.position.z = pz; pose.orientation.x = ox; pose.orientation.y = oy; pose.orientation.z = oz; pose.orientation.w = ow; return pose; } int main(int argc, char** argv) { ros::init(argc, argv, "move_test"); actionlib::SimpleActionClient<move_base_msgs::MoveBaseAction> move_base_client("move_base", true); ROS_INFO("Waiting for move_base action server..."); move_base_client.waitForServer(); ROS_INFO("connected to move base server"); std::vector<geometry_msgs::Pose> target_list; target_list.push_back(createPose(6.543, 4.779, 0.000, 0.000, 0.000, 0.645, 0.764)); target_list.push_back(createPose(5.543, -4.779, 0.000, 0.000, 0.000, 0.645, 0.764)); target_list.push_back(createPose(-5.543, 4.779, 0.000, 0.000, 0.000, 0.645, 0.764)); target_list.push_back(createPose(-5.543, -4.779, 0.000, 0.000, 0.000, 0.645, 0.764)); for (uint8_t i = 0; i < target_list.size(); i ++) { ros::Time start_time = ros::Time::now(); ROS_INFO("going to %u goal, position: (%f, %f)", i, target_list[i].position.x, target_list[i].position.y); move_base_msgs::MoveBaseGoal goal; goal.target_pose.header.frame_id = "map"; goal.target_pose.header.stamp = ros::Time::now(); goal.target_pose.pose = target_list[i]; move_base_client.sendGoal(goal); move_base_client.waitForResult(); if (move_base_client.getState() == actionlib::SimpleClientGoalState::SUCCEEDED) { ros::Duration running_time = ros::Time::now() - start_time; ROS_INFO("go to %u goal succeeded, running time %f sec", i, running_time.toSec()); } else { ROS_INFO("goal failed"); } } return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
(6)exploring_house.py的功能同exploring_house.cpp,只是用python实现一遍
#!/usr/bin/env python3 import rospy import actionlib from actionlib_msgs.msg import * from geometry_msgs.msg import Pose, PoseWithCovarianceStamped, Point, Quaternion, Twist from move_base_msgs.msg import MoveBaseAction, MoveBaseGoal def main(): rospy.init_node("move_test", anonymous=True) move_base_client = actionlib.SimpleActionClient("move_base", MoveBaseAction) rospy.loginfo("Waiting for move_base action server...") while move_base_client.wait_for_server(rospy.Duration(5.0)) == 0: rospy.loginfo("connected to move base server") target_list = [] target_list.append(Pose(Point(6.543, 4.779, 0.000), Quaternion(0.000, 0.000, 0.645, 0.764))) target_list.append(Pose(Point(5.543, -4.779, 0.000), Quaternion(0.000, 0.000, 0.645, 0.764))) target_list.append(Pose(Point(-5.543, 4.779, 0.000), Quaternion(0.000, 0.000, 0.645, 0.764))) target_list.append(Pose(Point(-5.543, -4.779, 0.000), Quaternion(0.000, 0.000, 0.645, 0.764))) for i, target in enumerate(target_list): start_time = rospy.Time.now() goal = MoveBaseGoal() goal.target_pose.pose = target goal.target_pose.header.frame_id = 'map' goal.target_pose.header.stamp = rospy.Time.now() rospy.loginfo("going to {0} goal, {1}".format(i, str(target))) move_base_client.send_goal(goal) finished_within_time = move_base_client.wait_for_result(rospy.Duration(300)) if not finished_within_time: move_base_client.cancel_goal() rospy.loginfo("time out, failed to goal") else: running_time = (rospy.Time.now() - start_time).to_sec() if move_base_client.get_state() == GoalStatus.SUCCEEDED: rospy.loginfo("go to {0} goal succeeded, run time: {1} sec".format(i, running_time)) else: rospy.loginfo("goal failed") if __name__ == "__main__": main()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
(7)CMakeLists.txt
cmake_minimum_required(VERSION 3.0.2) project(mbot_navigation) find_package(catkin REQUIRED COMPONENTS geometry_msgs move_base_msgs roscpp rospy actionlib ) catkin_package() include_directories( ${catkin_INCLUDE_DIRS} ) add_executable(exploring_house src/exploring_house.cpp) target_link_libraries(exploring_house ${catkin_LIBRARIES} ) catkin_install_python(PROGRAMS scripts/exploring_house.py DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION} )
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
(8)编译和运行
cd ~/catkin_ws
catkin_make -DCATKIN_WHITELIST_PACKAGES="mbot_navigation;mbot_gazebo"
source devel/setup.bash
// 打开仿真环境
roslaunch mbot_gazebo mbot_gazebo.launch
//再开一个窗口,运行有全局地图下的导航规划样例
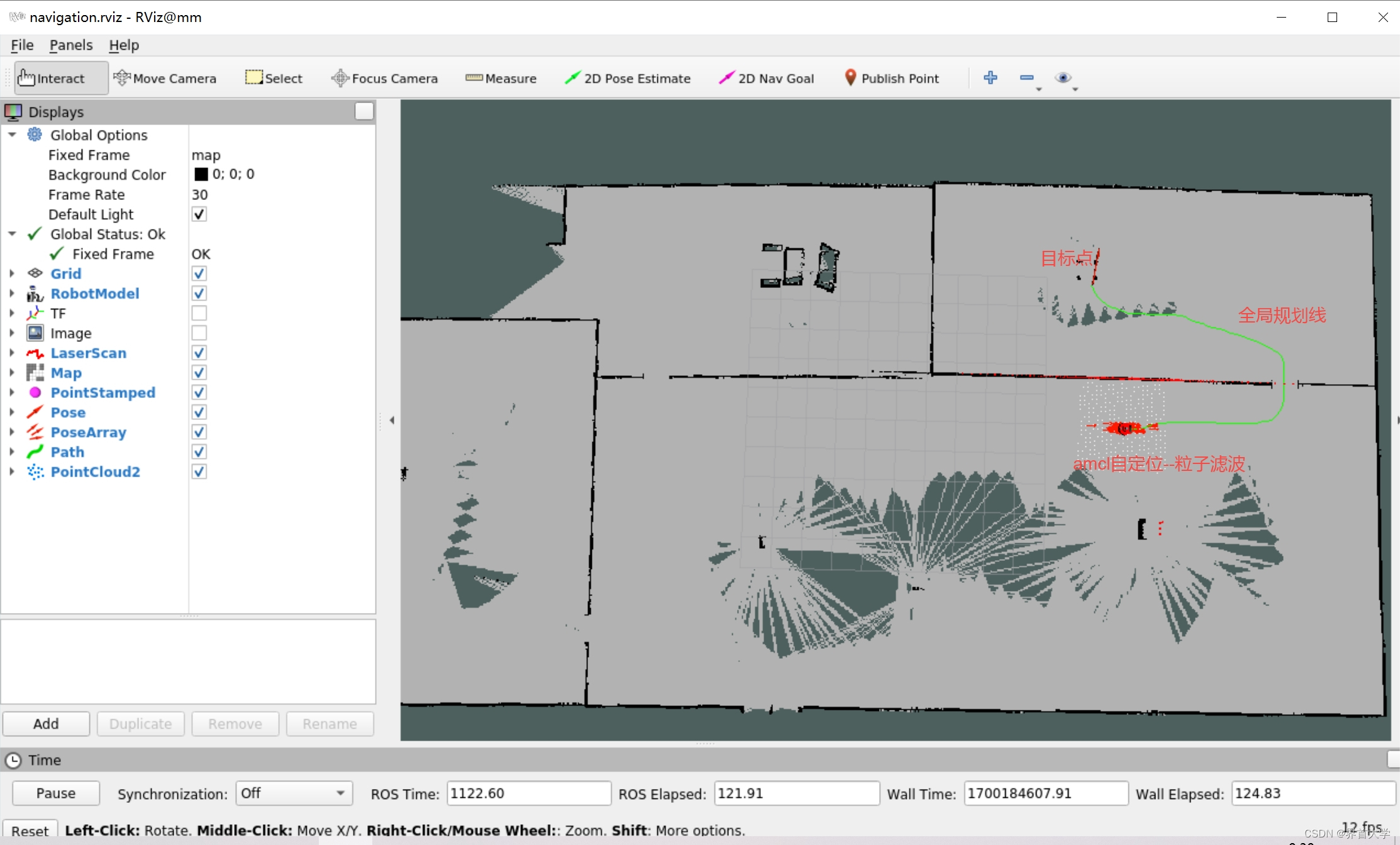
roslaunch mbot_navigation navigation_with_map.launch
// 再开一个窗口,控制机器人行动
rosrun mbot_navigation exploring_house
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
// 打开仿真环境
roslaunch mbot_gazebo mbot_gazebo.launch
//再开一个窗口,运行有无全局地图下的导航规划样例
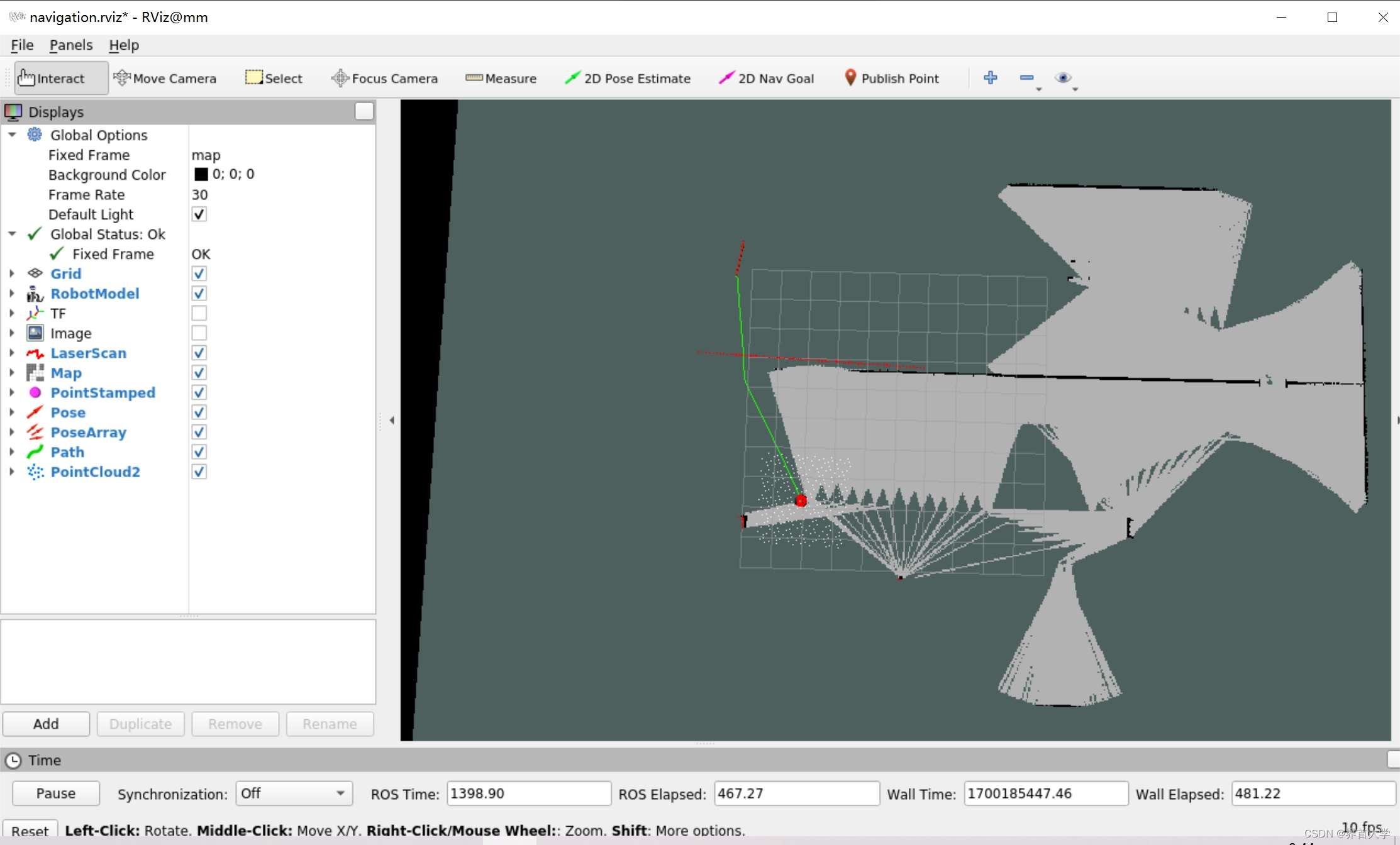
roslaunch mbot_navigation navigation_with_gmapping.launch
// 再开一个窗口,控制机器人行动
rosrun mbot_navigation exploring_house.py
- 1
- 2
- 3
- 4
- 5
- 6
3 总结
本文代码托管在本人的github上:mbot_navigation

