
热门标签
热门文章
- 1qml----动画入门(六、简单的动画实现 SpringAnimation类)
- 2Mozilla Firefox扩展(Extensions)开发——jpm_火狐扩展开发怎么使用node
- 3「2022年中国低代码/零代码行业综合影响力企业(技术服务商)TOP15 」正式发布_低代码企业50强
- 4js判断接入设备_js能否获取电脑插入的设备
- 5利用JavaScript判断用户设备类型_js获取设备类型
- 6使用GDAL对HDF数据进行校正
- 7kl距离 java_KL距离的计算
- 839.利用matlab寻找素数(matlab程序)_if(~mod(i,j))
- 9鸿蒙HarmonyOS应用开发之C/C++标准库机制概述
- 10linux爱好者之基础篇--目录_当系统建立一个目录时,还会在这个目录下创建两个目录文件,".."代表的是该目录的()
当前位置: article > 正文
uuv simulator 安装
作者:从前慢现在也慢 | 2024-04-09 06:19:06
赞
踩
uuv simulator
参考:Installation - Unmanned Underwater Vehicle Simulator Documentation
uuv_simulator软件包目前已针对kinetic、lunar和发布melodic。要安装所有软件包,请运行
sudo apt install ros-kinetic-uuv-simulatorsudo apt install ros-lunar-uuv-simulatorsudo apt install ros-melodic-uuv-simulator对于20.04系统,则不能用这个方法。下面介绍ubuntu20.04系统下uuv simulator的安装方法。
1、首先创建ROS工作区:
- source /opt/ros/noetic/setup.bash
- mkdir -p ~/catkin_ws/src
- cd ~/catkin_ws/
- catkin_make
2、下载uuv simulator
- cd ~/catkin_ws/src
- git clone --branch noetic https://github.com/arturmiller/uuv_simulator.git
3、source然后编译
- source /opt/ros/noetic/setup.bash
- cd ~/catkin_ws
- catkin_make
4、更新~/.bashrc文件
- echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
- source ~/.bashrc
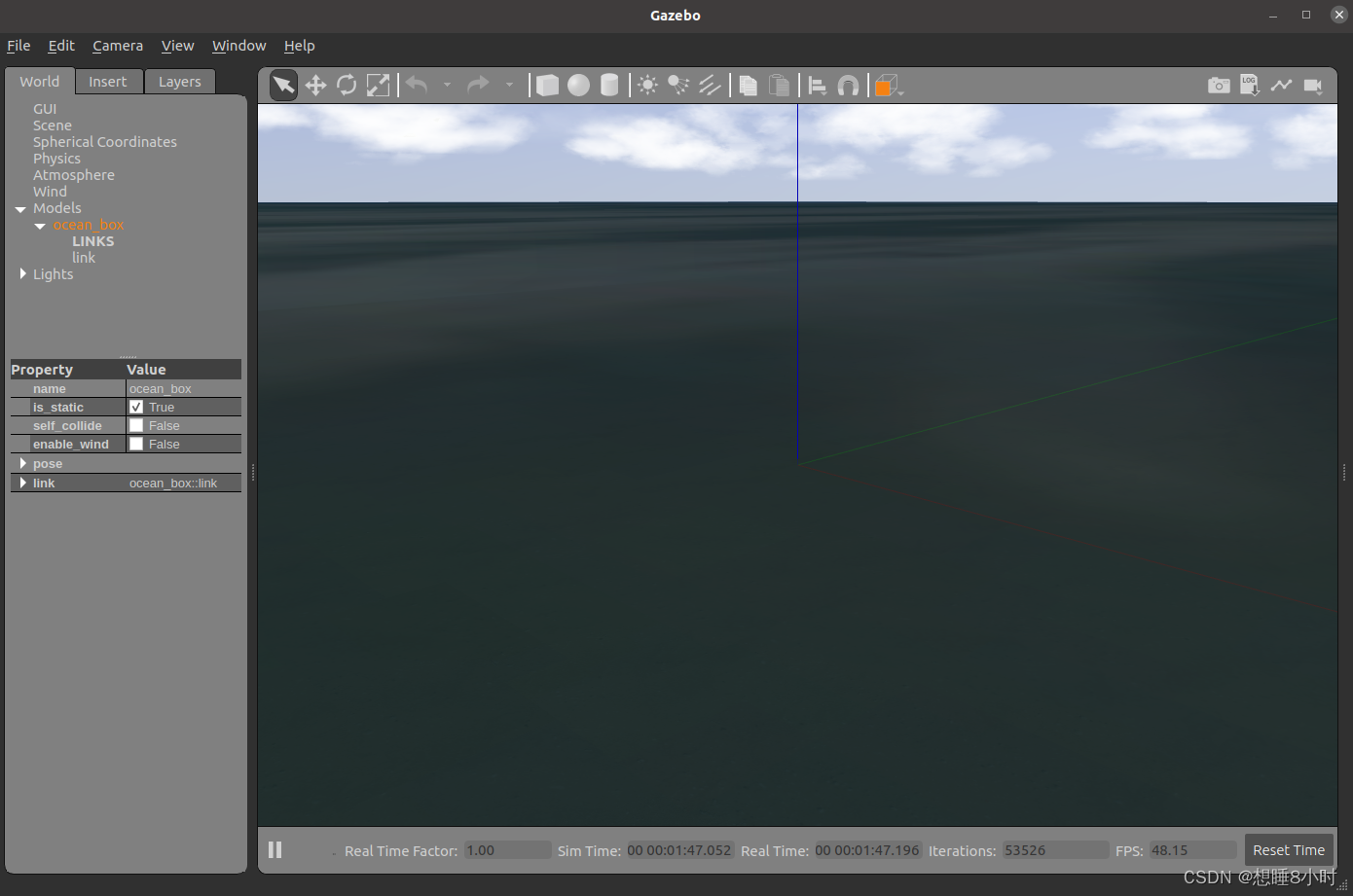
现在已经安装完毕,接下来输入命令进行测试
roslaunch uuv_gazebo_worlds empty_underwater_world.launch启动空的水下环境,成功~
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/从前慢现在也慢/article/detail/390846
推荐阅读
相关标签

