
- 1语音算法论文中frame-level,segment-level,utterance-level fearure
- 2阿里云产品介绍_阿里云产品 其他云
- 3情感分析的未来趋势:AI与人工智能的融合
- 4应用程序开发(ArkTS)_arkts单例模式
- 5Python之Django 基本使用_django python
- 6GPT-4:模型架构、训练方法与 Fine-tuning 详解_gpt4 finetune
- 7python 之jieba分词
- 8数据增强技术在智能客服中的应用:了解如何将数据集用于训练和评估智能客服模型_电商客服机器人训练数据集
- 9SAP 将smartforms的报表转成PDF_abap编程 smartforms 自动打印为pdf
- 10百度 文心一言 sdk 试用_wenxin-sdk-java
第五届广西大学生人工智能设计大赛人形赛道代码
赞
踩
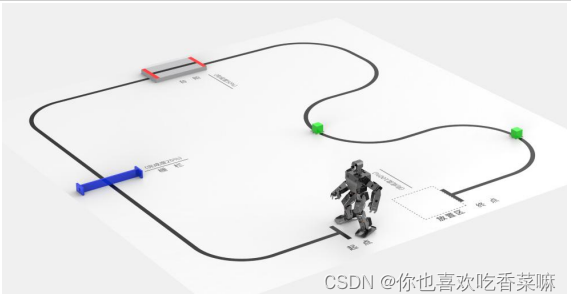
一、赛道地图
二、比赛规则
1、机器人面向起跑线后,裁判发令计时开始,启动机器人;
2、每支队伍有且仅有一次上场机会,完成比赛时间越短,完成度越高,得 分越高;
3、自主跨栏:机器人通过视觉识别栅栏,完成自主跨栏任务,跨栏过程机 器人摔倒无法自动起立、出界或无法跨越栅栏,可以向裁判请求跳过项目 或者扶正机器人,并按照规则扣分,共 3 次机会,过程中计时继续;
4、上下台阶:机器人通过视觉识台阶,自主完成上、下台阶动作,上下台 阶过程中出现机器人摔倒、出界或无法自主上下台阶,可以向裁判请求跳 过项目或者扶正机器人,并按照规则进行扣分,共 3 次机会,过程中计时 继续;
5、自主搬运:机器人通过视觉识别方块,然后通过手掌开合进行抓取,并 将其搬到终点位置的放置区,抓取前方块必须在虚线框内,搬运过程中方 块必须始终在手上,如果中途掉落则视为没有搬运该方块,方块必须放到 终点的放置区(方块的任意部位都在放置区内),否则视为没有搬运该方 块,可以向裁判请求跳过项目,并按照规则进行扣分,机器人在搬运过程 中出现摔倒或偏离轨道,可以向裁判申请扶正机器人,并按照规则进行扣 分,共 3 次机会,过程中计时继续;
6、视觉巡线:比赛全程机器人必须通过视觉识别自主巡线完成,机器人在 巡线过程中出现摔倒或双脚偏离轨道,可以向裁判申请扶正机器人,并按 照规则进行扣分,共 3 次机会,过程中计时继续;
7、机器人到达放置区且方块在放置区掉落触地后,计时结束,记录比赛时 间,如果没有搬运方块,则机器人到达放置区后计时结束,记录比赛时间 (机器人到达放置区指机器人的任意部位都在放置区内,否则扣 3 分)。
三、参考代码
四、补充
1、机器人手掌舵机函数
SSR.serial_setServo(17, 500, 400) #17号舵机, 运动角度500,运行时间400ms2、动作组函数
SSR.runAction('turn_right')#左转3、运行多次动作组函数
- for i in range(2):
- SSR.runAction(turn_right) #右转两次
4、文件命名规则
文件名需以cv_开头,.py为后缀

5、文件放置位置
修改好的文件需放置在树莓派《human_code》文件夹路径之下。
6、注意
代码里面修改行走方式要这样
![]()

