
- 1第四十一周:文献阅读+GAN存在的问题和改进_tts-gan: a transformer-based time-series generativ
- 2项目大集成
- 3【华为OD机试真题 JS语言】407、分配土地 | 机试真题+思路参考+代码解析(C卷)(本题100%)
- 4Android7.0(Android N)适配教程,心得_7.0适配
- 5cosbench - 对象存储性能压力测试工具
- 6jeecgboot-online表单开发-控件配置_jeecgboot的popup控件如何设置单选
- 7Vivado2018.3安装教程(含lincese)_vivado2018.3安装包
- 8开源OCR模型对比
- 9使用cli批量下载GitHub仓库中所有的release_github cli下载
- 10TextBrewer:融合并改进了NLP和CV中的多种知识蒸馏技术、提供便捷快速的知识蒸馏框架、提升模型的推理速度,减少内存占用_textbrewer专为nlp模型的知识蒸馏而设计。它提供了各种蒸馏方法,并为快速设置实验
Ubuntu18.04下PX4+gazebo+QGC实现无人机在仿真环境下的房屋巡视_ubuntu下载px4
赞
踩
前言:老师给我布置了在仿真环境下模拟带摄像头的无人机在仿真环境下的巡视任务,在完成任务的过程中,遇到了很多问题,查阅了许多博主的资料,有些关键环节只是被一带而过,导致安装配置环境的过程中十分痛苦,想写一点东西,多提供一些解决方案和思路。
目录
一、框架:
在收到这个任务之后,首先是查阅资料建立整个框架。下图是我找到的能够完整表述我此次任务的框架图(引用自https://blog.csdn.net/lida2003/article/details/125419971?spm=1001.2014.3001.5506PX4-Gazebo仿真学习笔记(转载,感觉说得不错)_TYINY的博客-CSDN博客https://blog.csdn.net/lida2003/article/details/125419971?spm=1001.2014.3001.5506)
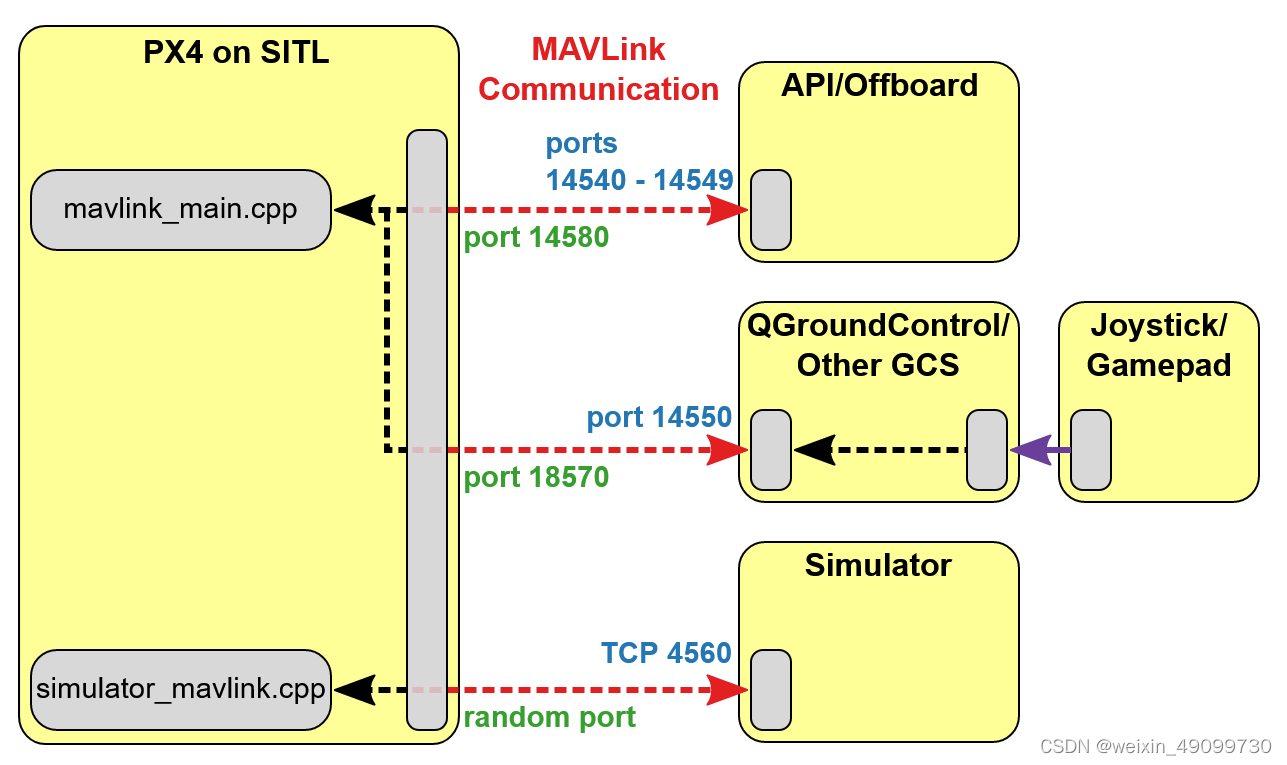
gazebo仿真环境下的无人机模型由下载的px4固件包提供,通过mavros实现QGC地面站和仿真环境下无人机的通信,同时控制无人机进行运动。(图片中的各模块有啥作用,上面引用的链接说的很清楚了。)
二、linux、ubuntu、ROS的关系
这里拿windows做类比,linux相当于windows,ubuntu16.04、ubuntu18.04相当于windows10、windows11,而ROS相当于windows下的一个应用(App)。
目前,ROS在ubuntu系统的中适配度最好。涉及到机器人的开发应用,基本上离不开ROS(Robot Operating System)。
注意1:如果你要从ubuntu 16.04对应ROS kinetic版本,ubuntu18.04对应ROS melodic版本,这是相互对应的。
注意2:ROS只支持python2不支持python3,我在配置过程中碰到了需要来回切换python版本的操作,附链接:linux切换python版本优先级_Linux下python默认版本切换成替代版本_孙煜征的博客-CSDN博客
关于ROS和Gazebo的下载可以自行查阅相关博文。
三、px4固件的下载
我这里一开始打算从github上下载,但是下载速度太慢了,改镜像、查ip、找ladder(失败好像是因为底层proxy没有打开)、自己建立gitee仓库都试过了,不是没啥用就是太麻烦,经过2、3天左右的折磨,最后找到一个下载的打包好的压缩包(见评论区),相应的配置过程也很清晰明了,链接如下:Ubuntu20.04或18.04下PX4(pixhawk)源码编译环境配置教程,及构建代码各种错误解决办法_Iamsonice的博客-CSDN博客_ubuntu20.04安装px4
注意:在上述链接提到的运行ubuntu.sh脚本文件(即下述代码)的过程中,如果下载的比较慢,可以连接手机热点下载,我连上手机热点之后,一下就下载完了,具体原理是啥我也不太清楚。
bash ./PX4-Autopilot/Tools/setup/ubuntu.sh四、安装mavros
情况也是一样,得从github上下载,遇到这类问题,考虑到px4固件的前车之鉴,这里我直接查找有无直接打包下载好的文件。有兴趣尝试的朋友可以试一下连手机热点下载,应该也能解决。链接如下:PX4无人机-Gazebo仿真实现移动物体的跟踪_解矣。的博客-CSDN博客_gazebo轨迹跟踪
注:linux下文件夹的移动参考链接:linux移动文件夹_爱学习的Amelia的博客-CSDN博客_linux移动文件夹
五、px4无人机摄像头的添加
这里参考链接:PX4无人机-Gazebo仿真实现移动物体的跟踪_解矣。的博客-CSDN博客_gazebo轨迹跟踪
解释说明:这里用到的深度相机、雷达等模型在PX4-Autopilot/Tools/sitl_gazebo/models下,大家可以根据需要进行选择。
六、gazebo仿真模型和px4无人机场景的搭建
首先需要建立gazebo仿真场景,我找了一个仿真场景模型库,链接如下:下载Gazebo模型_一只努力翻身的咸鱼的博客-CSDN博客_下载gazebo模型
用下载好的models文件替换掉.gazebo/models(主目录下,ctrl+H显示隐藏文件就可以看到.gazebo文件啦),再次打开gazebo,其中的模型库就更新好了。
建立仿真环境myworld.world文件:
打开一个终端,输入
sudo gazebo进入gazebo后点击左上方的insert,搭建你想要的环境,搭建完之后,点击左上角file->save world as,将文件命名为myworld.world,保存到PX4-Autopilot/Tools/sitl_gazebo/worlds。仿真环境就建立好了。
要想使无人机出现在仿真环境中,这里,在此博文的基础上进行微改:PX4无人机-Gazebo仿真实现移动物体的跟踪_解矣。的博客-CSDN博客_gazebo轨迹跟踪
将PX4-Autopilot下launch文件下的mavros_posix_sitl_cp.launch和posix_sitl_cp.launch文件下的empty.world参数改为myworld.world,即:
<arg name="world" default="$(find mavlink_sitl_gazebo)/worlds/myworld.world"/>
打开终端,运行
roslaunch px4 mavros_posix_sitl_cp.launch 到此,整个仿真环境就算搭建好了,摄像头的图像需要打开rviz进行查看。
七、QGC地面站实现仿真环境下的无人机控制
下载QGC,直接进入QGC - QGroundControl - Drone Control官网,按照官网的指导,运行一系列命令行即可成功安装。有些博客让先下载QT编译器,然后对QGC包进行解压。如果不对QGC进行二次开发的话,完全没必要这样做。直接按照QGC官网提供的方式可以直接了当的解决问题。
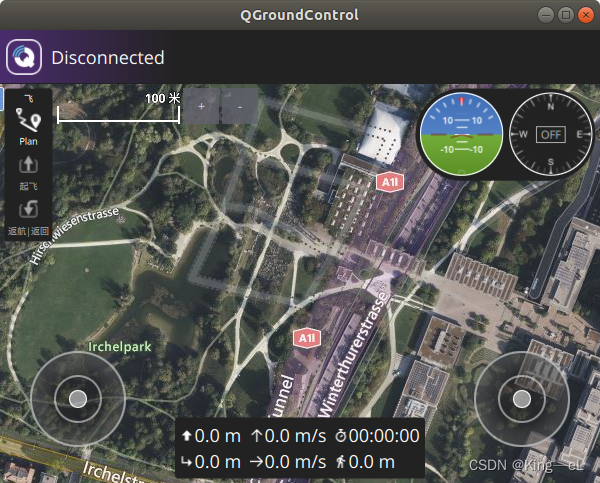
把下图的UDP勾选上,QGC就可以自动连接上仿真环境下的无人机了。

勾选上虚拟手柄和油门居中。(由于之前玩过穿越机,我手上有joystick,但是QGC对我手柄的兼容性不是很好,在我手柄俯仰和滚转通道居中时,映射到QGC上却是向左翻滚和向后仰,顾只好采取虚拟手柄的方法)

主界面就出现控制虚拟控制手柄了(和王者荣耀差不多,手动滑稽.jpg)
由于虚拟遥感的操控的不便捷性,建议飞行模式选择定点,这样无人机就可以在竖直方向上保持恒定高度。我们只需控制右边的俯仰和滚转通道,控制无人机的运动。

八、最终效果
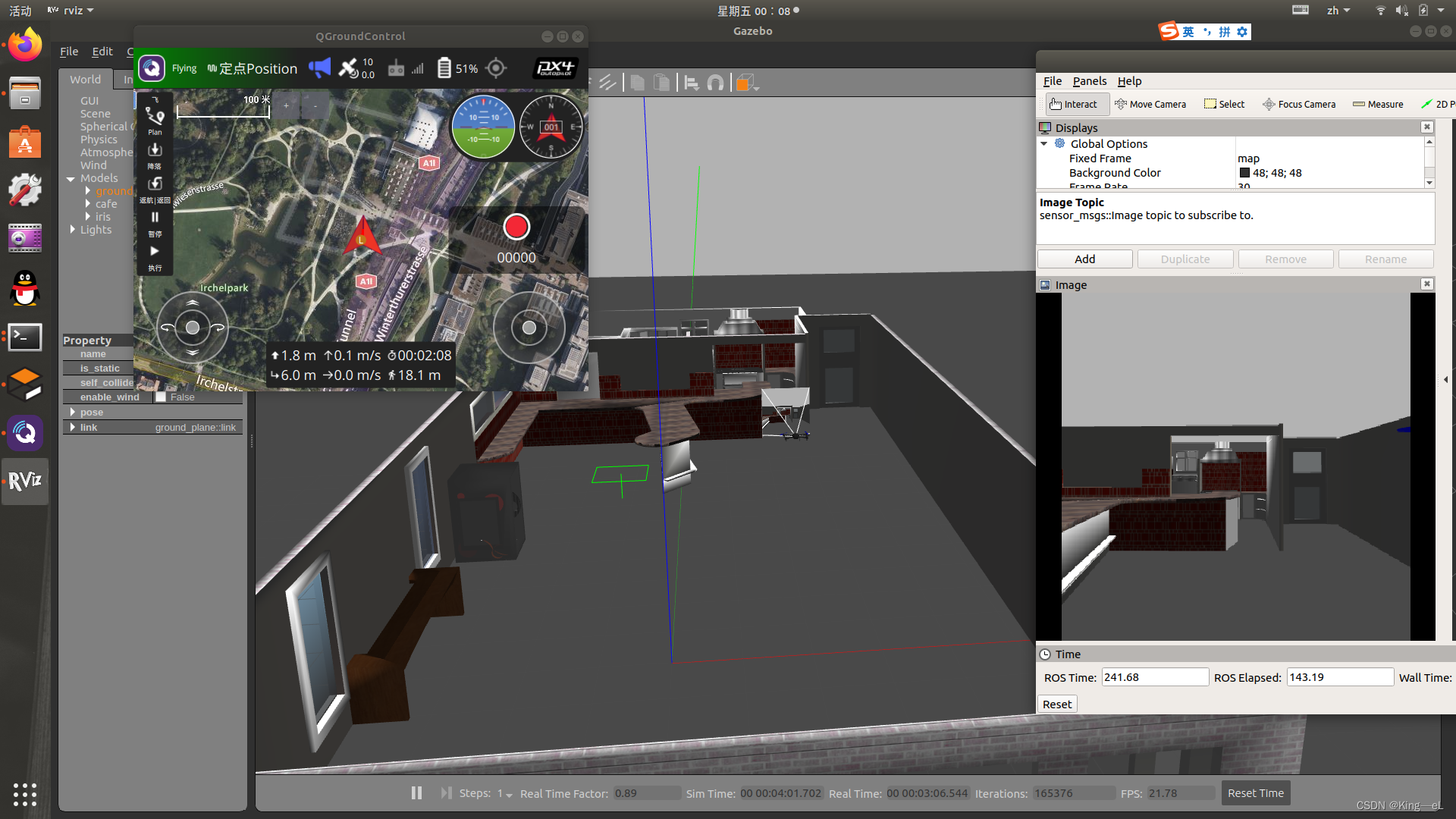
结语:由于我是配置完之后再写的博客,有些细节之处可能没有把握的很好,大家可以在评论区相互补充,在此感谢文中前辈们提供的方案,最后祝大家都能配置好自己想要环境。

