
- 1zynq学习之fpga篇(四)数码管动态显示_数码管动态显示fpga
- 2YARN架构设计和原理_描述yarn 集群的架构和工作原理
- 3云原生Kubernetes: K8S 1.29版本 部署GitLab_kubernetes-server1.29
- 4第9章 类
- 5C语言播放音乐 Windows多媒体库MCI使用大全_c语言播放音乐要在什么播放下载
- 6yolov5中关闭wandb_yolox关闭wandb
- 7ElementUI简介_element ui
- 82024年主流常见本地知识库技术方案_知识库开源项目
- 9导入别人的项目出现IDEA报错--java: 非法的表达式开始/需要‘;‘/需要‘)等_idea拉取得代码 非法开始
- 10Docker常用命令详解_docker操作命令
Openharmony的设备开发流程 Hi3516DV300_openharmony4 hi3516dv300
赞
踩
安装VirtualBox
这里用VirtualBox 6.1.3
https://download.virtualbox.org/virtualbox/6.1.30/VirtualBox-6.1.30-148432-Win.exe
安装
安装Ubuntu镜像
Ubuntu系统要求:Ubuntu18.04~21.10版本。推荐使用20.04版本,内存16 GB及以上。
https://mirrors.huaweicloud.com/home
https://mirrors.huaweicloud.com/ubuntu-releases/20.04/ubuntu-20.04.6-desktop-amd64.iso



安装Ubuntu





安装DevEco Device Tool
通常在嵌入式开发中,很多开发者习惯于使用Windows进行代码的编辑,比如使用Windows的Visual Studio Code进行OpenHarmony代码的开发。但当前阶段,仅Hi3861系列开发板支持在Windows环境下进行编译(点击查看详情),大部分的开发板源码还不支持在Windows环境下进行编译,如Hi3516系列开发板。因此,需要使用Ubuntu的编译环境对源码进行编译。
在以上的设备开发场景中,可以搭建一套Windows+Ubuntu混合开发的环境,其中使用Windows平台的DevEco Device Tool可视化界面进行相关操作,通过远程连接的方式对接Ubuntu下的DevEco Device Tool(Ubuntu下可以不安装Visual Studio Code),然后对Ubuntu下的源码进行开发、编译、烧录等操作。
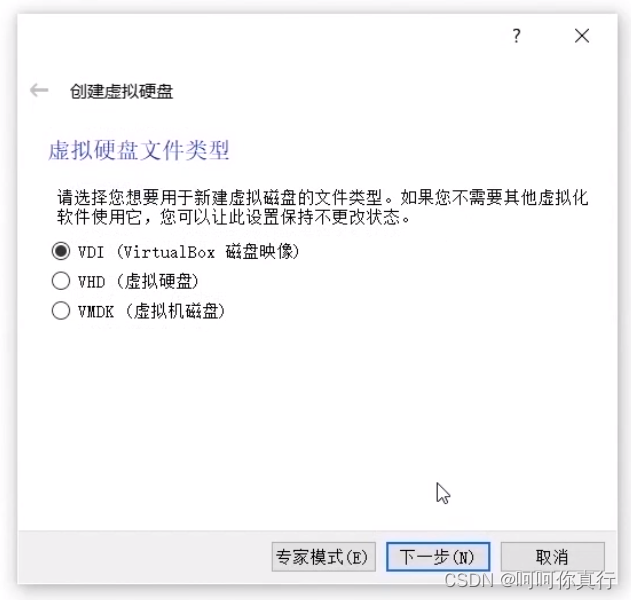
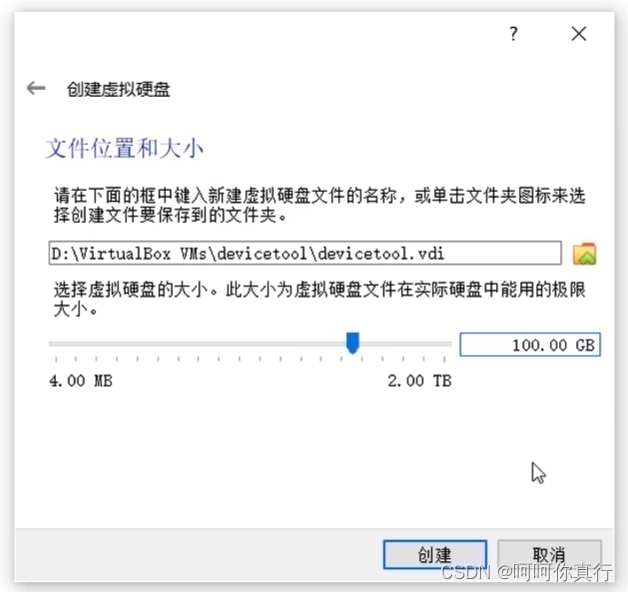
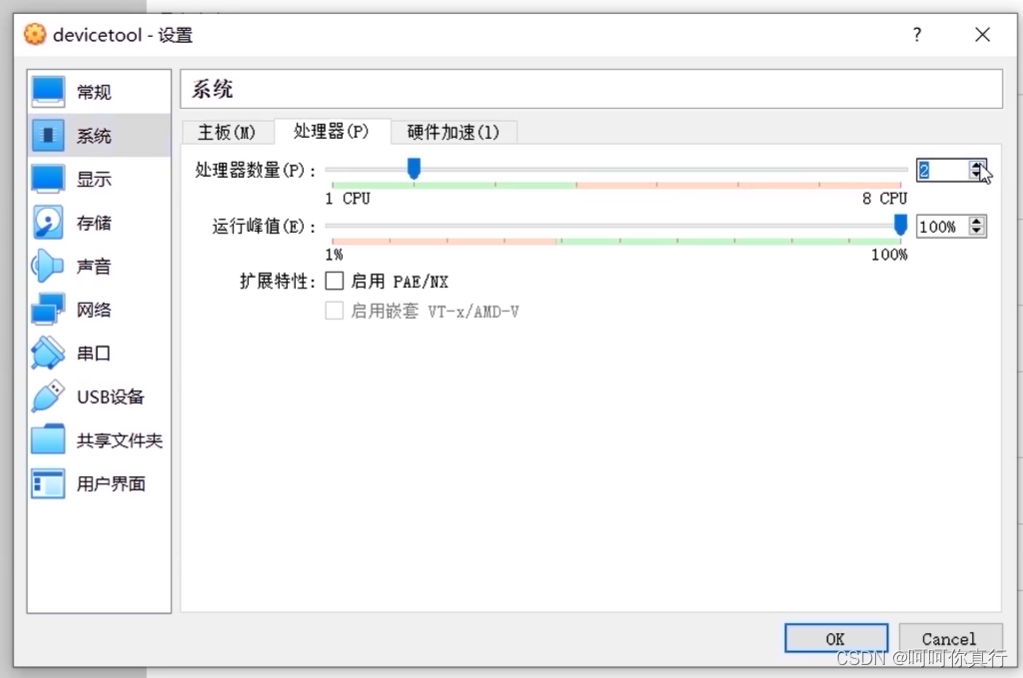
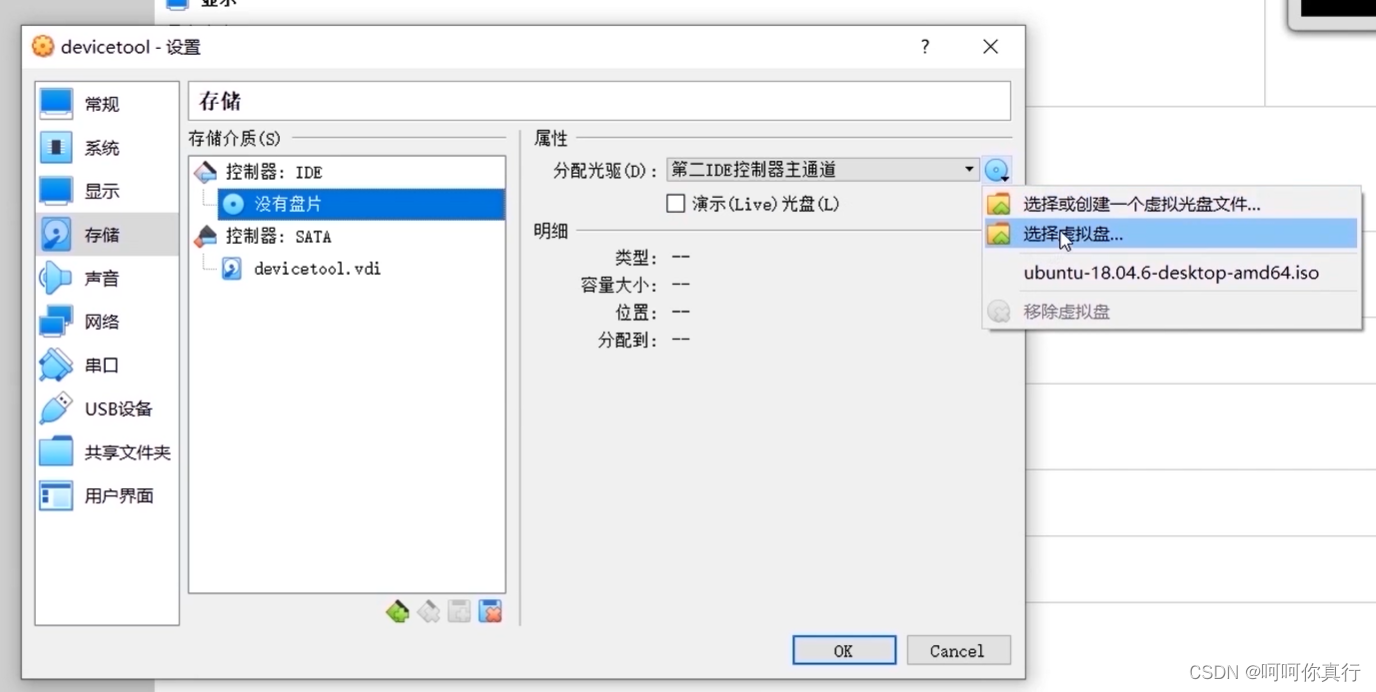
Ubuntu安装
将Ubuntu Shell环境修改为bash。
执行如下命令,确认输出结果为bash。如果输出结果不是bash,请根据b,将Ubuntu shell修改为bash。
ls -l /bin/sh
- 1

打开终端工具,执行如下命令,输入密码,然后选择No,将Ubuntu shell由dash修改为bash。
sudo dpkg-reconfigure dash
- 1


下载DevEco Device Tool最新Linux版本软件包。https://device.harmonyos.com/cn/develop/ide#download

解压DevEco Device Tool软件包并对解压后的文件夹进行赋权。
进入DevEco Device Tool软件包目录,执行如下命令解压软件包,其中devicetool-linux-tool-4.0.0.400.zip为软件包名称,请根据实际进行修改。
unzip devicetool-linux-tool-{Version}.zip
- 1
进入解压后的文件夹,执行如下命令,赋予安装文件可执行权限,其中devicetool-linux-tool-4.0.0.400.sh请根据实际进行修改。
chmod u+x devicetool-linux-tool-4.0.0.400.sh
- 1
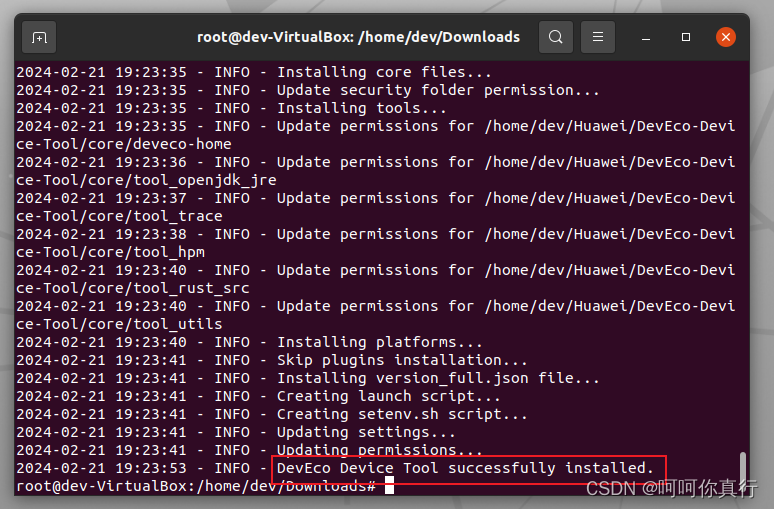
执行如下命令,安装DevEco Device Tool,其中devicetool-linux-tool-4.0.0.400.sh请根据实际进行修改。
sudo ./devicetool-linux-tool-4.0.0.400.sh
- 1
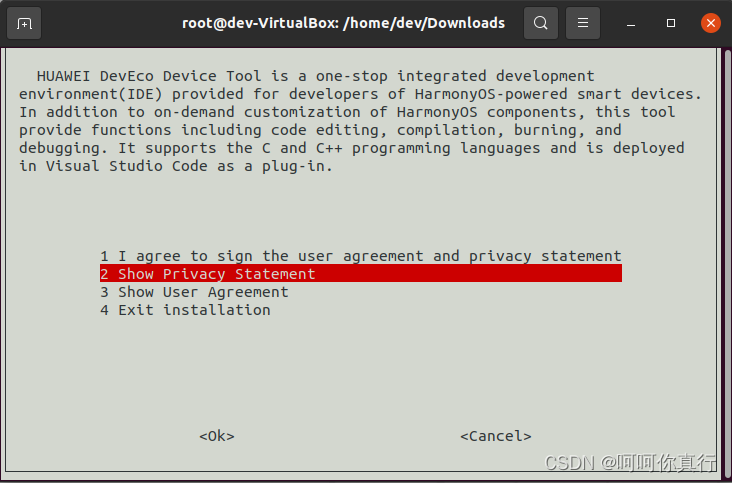
在用户协议和隐私声明签署界面,请详细阅读用户协议和隐私声明,需签署同意用户协议和隐私声明才能进行下一步的安装,可通过键盘的上下按键进行选择。
配置Windows远程访问Ubuntu环境
安装SSH服务并获取远程访问的IP地址
在Ubuntu系统中,打开终端工具,执行如下命令安装SSH服务。

NOTE
如果执行该命令失败,提示openssh-server和openssh-client依赖版本不同,请根据CLI界面提示信息,安装openssh-client相应版本后(例如:sudo apt-get install openssh-client=1:8.2p1-4),再重新执行该命令安装openssh-server。
apt-get install openssh-server
- 1
执行如下命令,启动SSH服务。
systemctl start ssh
- 1
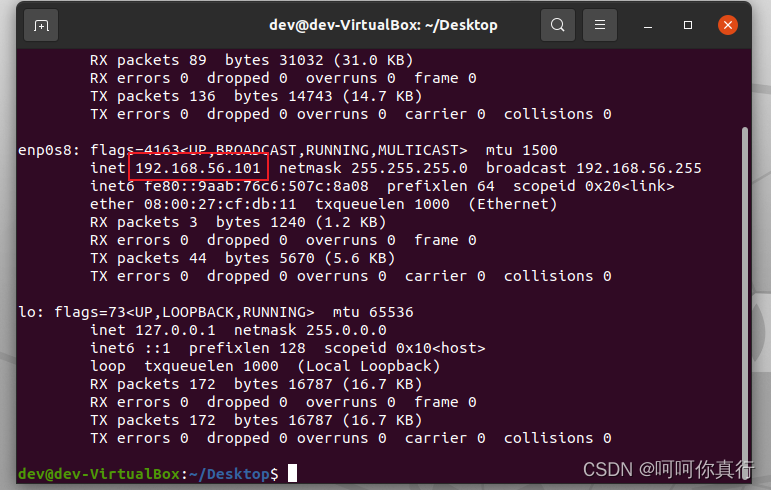
执行如下命令,获取当前用户的IP地址,用于Windows系统远程访问Ubuntu环境。
ifconfig
- 1
NOTE
如果执行ifconfig命令提示“command-not-found”,请执行sudo apt-get install net-tools命令安装网络查询工具,然后重新查询IP地址。
Windows安装
下载
https://device.harmonyos.com/cn/develop/ide#download
安装软件

搭建Windows环境
下载DevEco Device Tool最新Windows版本软件包。
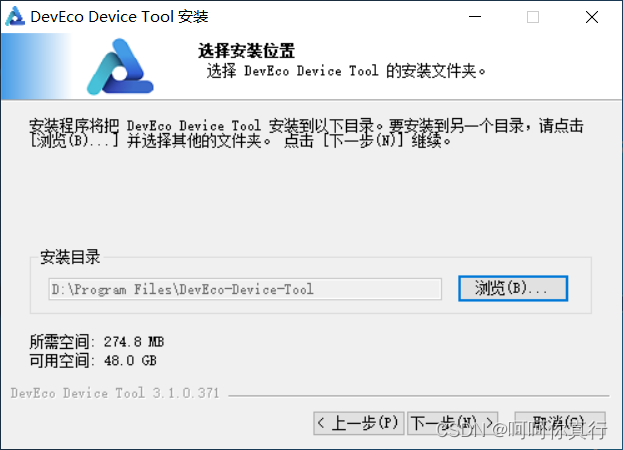
解压DevEco Device Tool压缩包,双击安装包程序,单击下一步进行安装。
请查阅用户协议和隐私声明,需勾选“我接受许可证协议中的条款”后,才能继续下一步的安装。
设置DevEco Device Tool的安装路径,请注意安装路径不能包含中文字符,不建议安装到C盘目录,单击下一步。
根据安装向导提示,安装依赖的工具。
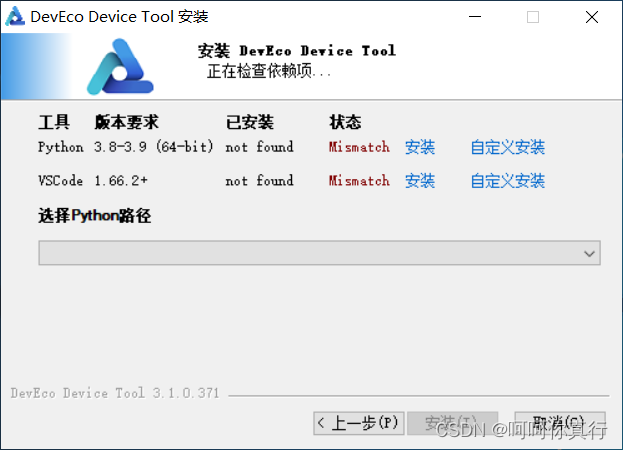
其中,
安装:按照默认路径及参数直接安装。
自定义安装:安装前可以自行修改安装路径及其他设置参数。
安装完成后,各软件状态显示为OK。

依赖的工具安装完成后,单击安装,开始安装DevEco Device Tool。
继续等待DevEco Device Tool安装向导自动安装DevEco Device Tool插件,直至安装完成,单击完成,关闭DevEco Device Tool安装向导。

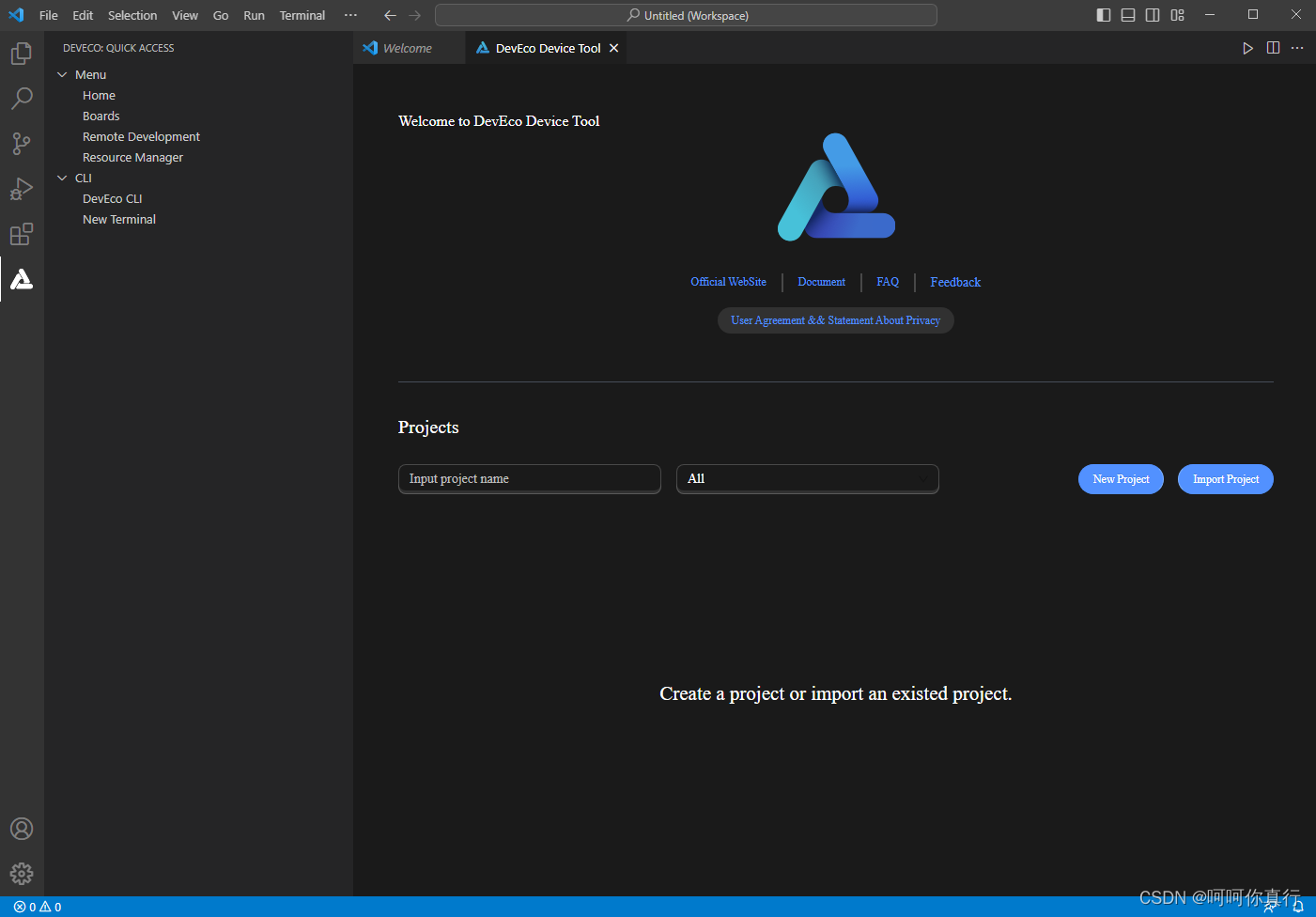
打开Visual Studio Code,进入DevEco Device Tool工具界面。至此,DevEco Device Tool Windows开发环境安装完成。
安装Remote SSH
打开Windows系统下的Visual Studio Code,点击 ,在插件市场的搜索输入框中输入“remote-ssh”。
,在插件市场的搜索输入框中输入“remote-ssh”。

点击Remote-SSH的Install,安装Remote-SSH。安装成功后,在INSTALLED下可以看到已安装Remote-SSH。

远程连接Ubuntu环境
打开Windows系统的Visual Studio Code,点击
,在SSH TARGETS下,单击+。


在弹出的SSH连接命令输入框中输入“ssh username@ip_address”,其中ip_address为要连接的远程计算机的IP地址,username为登录远程计算机的帐号。


连接成功后,等待在远程计算机用户目录下的.vscode-server文件夹下自动安装插件,安装完成后,根据界面提示在Windows系统下重新加载Visual Studio Code,便可以在Windows的DevEco Device Tool界面进行源码开发、编译、烧录等操作。
NOTE
如果您之前安装过DevEco Device Tool 以前的版本,可能出现插件安装失败的情况,Visual Studio Code右下角一直处于如下界面,请参考DevEco Device Tool插件安装失败处理办法进行处理。
至此,环境搭建完成,如下图所示,左下角显示远程连接计算机的IP地址。

体验OpenHarmony设备开发
DevEco Device Tool安装完成后,您可以快速体验OpenHarmony设备开发的流程,在设备上运行Hello World。OpenHarmony支持轻量和小型系统(如IoT类设备,参考内存≤128MiB)设备、标准系统(参考内存≥128MiB)设备,其快速入门指导请参考设备开发快速入门。
创建工程并获取源码
在通过DevEco Device Tool创建OpenHarmony工程时,可自动下载相应版本的OpenHarmony源码。
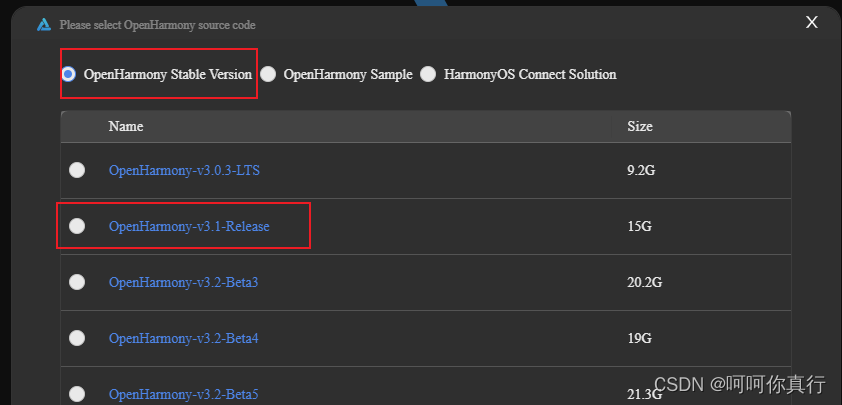
OpenHarmony Stable Version类型的源码为OpenHarmony稳定版本源码,通过镜像站点获取,支持OpenHarmony-v3.0.3-LTS、OpenHarmony-v3.1-Release、OpenHarmony-v3.2-Beta3、OpenHarmony-v3.2-Beta4、OpenHarmony-v3.2-Beta5、OpenHarmony-v3.2-Release版本。
镜像站点的源码,一般取自该稳定版本的发布时间点,因此,通过镜像站点获取的源码可能不是该版本最新源码。如果您需要获取对应版本的最新源码,请参考从码云仓库获取源码,获取源码后,请参考《HUAWEI DevEco Device Tool 使用指南》的“导入OpenHarmony源码”章节,在DevEco Device Tool中导入源码。
此处以下载OpenHarmony Stable Version源码为例,说明操作过程。关于其他类型源码的下载,可参考《HUAWEI DevEco Device Tool 使用指南》。
前提条件
只有在Windows环境通过Remote SSH远程连接上Ubuntu环境的情况下,才可以创建OpenHarmony新工程,具体请参考搭建开发环境。
icon-note.gif 说明: 若Windows环境未远程连接Ubuntu环境,New Project功能仅针对海思企业用户,不支持创建OpenHarmony工程。
操作步骤
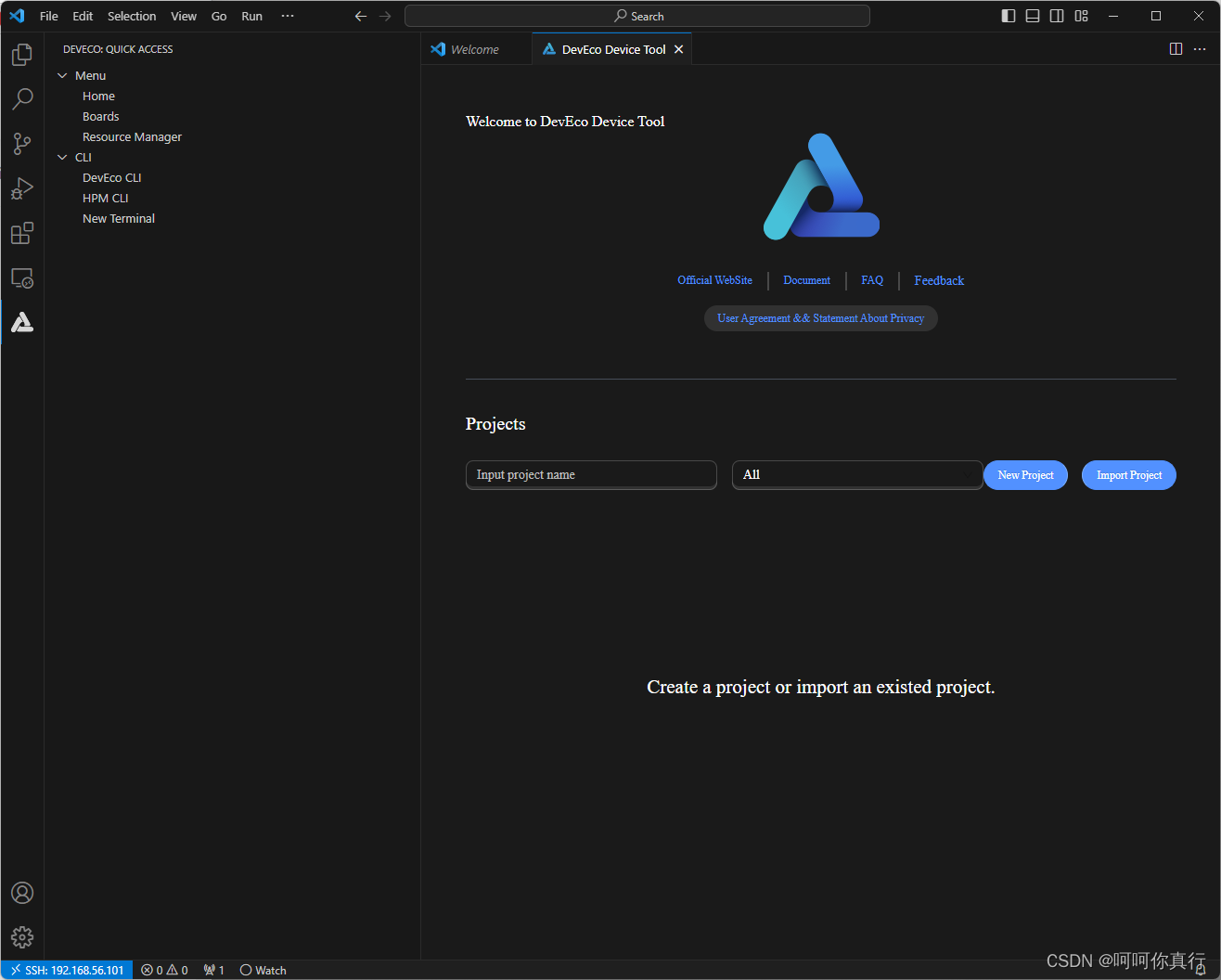
打开DevEco Device Tool,进入Home页,点击New Project创建新工程。
在新工程的配置向导页,配置工程相关信息,包括:
OpenHarmony Source Code:选择需要下载的OpenHarmony源码,请选择OpenHarmony Stable Version下的源码版本,支持OpenHarmony-v3.0.3-LTS、OpenHarmony-v3.1-Release、OpenHarmony-v3.2-Beta3、OpenHarmony-v3.2-Beta4、OpenHarmony-v3.2-Beta5、OpenHarmony-v3.2-Release版本。
Project Name:设置工程名称。
Project Path:选择工程文件存储路径。
SOC:选择支持的芯片。
Board:选择支持的开发板。
Product:选择产品。
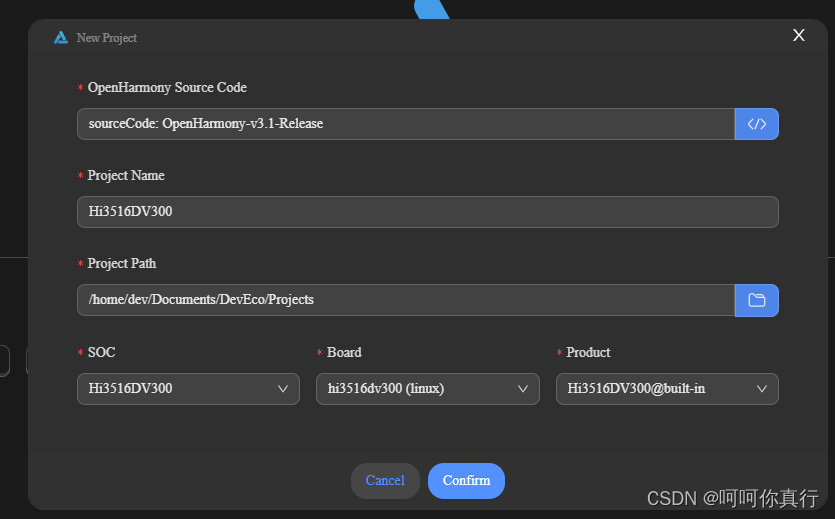
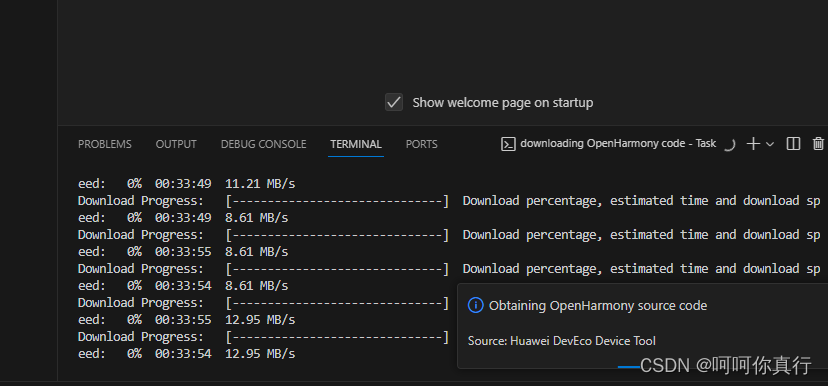
工程配置完成后,点击Confirm,DevEco Device Tool会自动启动OpenHarmony源码的下载。由于OpenHarmony稳定版本源码包体积较大,请耐心等待源码下载完成。

编译
DevEco Device Tool支持Hi3516DV300开发板的源码一键编译功能,提供编译工具链和编译环境依赖的检测及一键安装,简化复杂编译环境的同时,提升了编译的效率。
https://docs.openharmony.cn/pages/v4.0/zh-cn/device-dev/quick-start/quickstart-ide-3516-build.md/
icon-note.gif 说明: Hi3516DV300编译环境为Ubuntu环境。
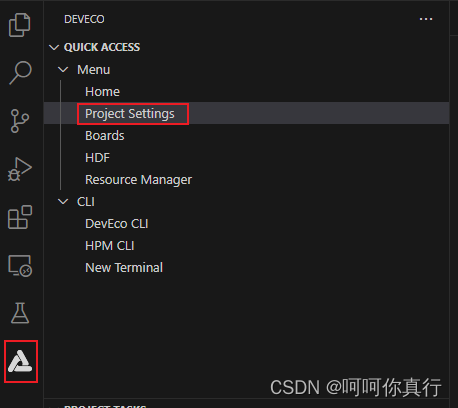
在菜单栏中点击Project Settings,进入Hi3516DV300工程配置界面。
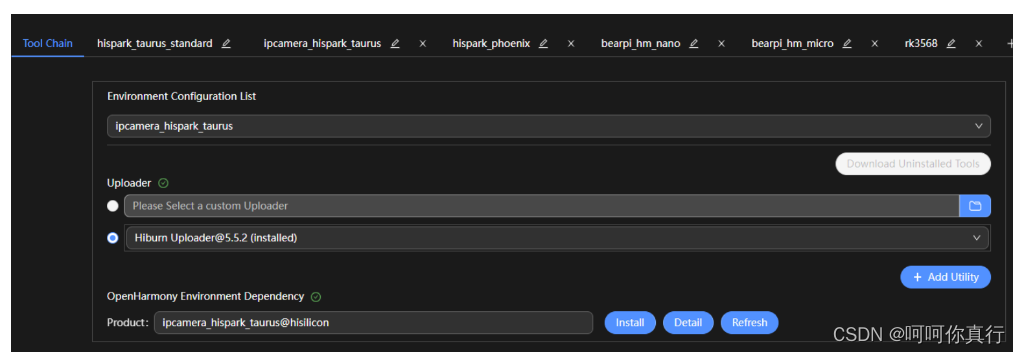
在“Tool Chain”页签中,DevEco Device Tool会自动检测依赖的编译工具链是否完备。
如工具为“uninstalled”状态(status_uninstall),可单击Download Uninstalled Tools,自动安装所需工具,或单击工具后方的Download安装指定工具。
如当前识别到的工具类型有缺失,需要补充,可单击Add Utility添加。
如工具无法通过Download方式安装,表示该工具未被DevEco Device Tool收录,需要开发者自行下载到本地后单击Import导入。
如“OpenHarmony Environment Dependency”的状态异常(status_uninstall),请单击Install安装。
部分工具安装需要使用root权限,请在“TERMINAL”窗口输入用户密码进行安装。
icon-note.gif 说明:
如果出现安装pip组件失败,可参考修改Python源的方法进行修改,完成尝试重新安装。
若出现安装apt组件失败,可参考修改apt源的方法进行修改,完成后尝试重新安装。

安装完成后,工具和环境依赖的状态显示为status_install。
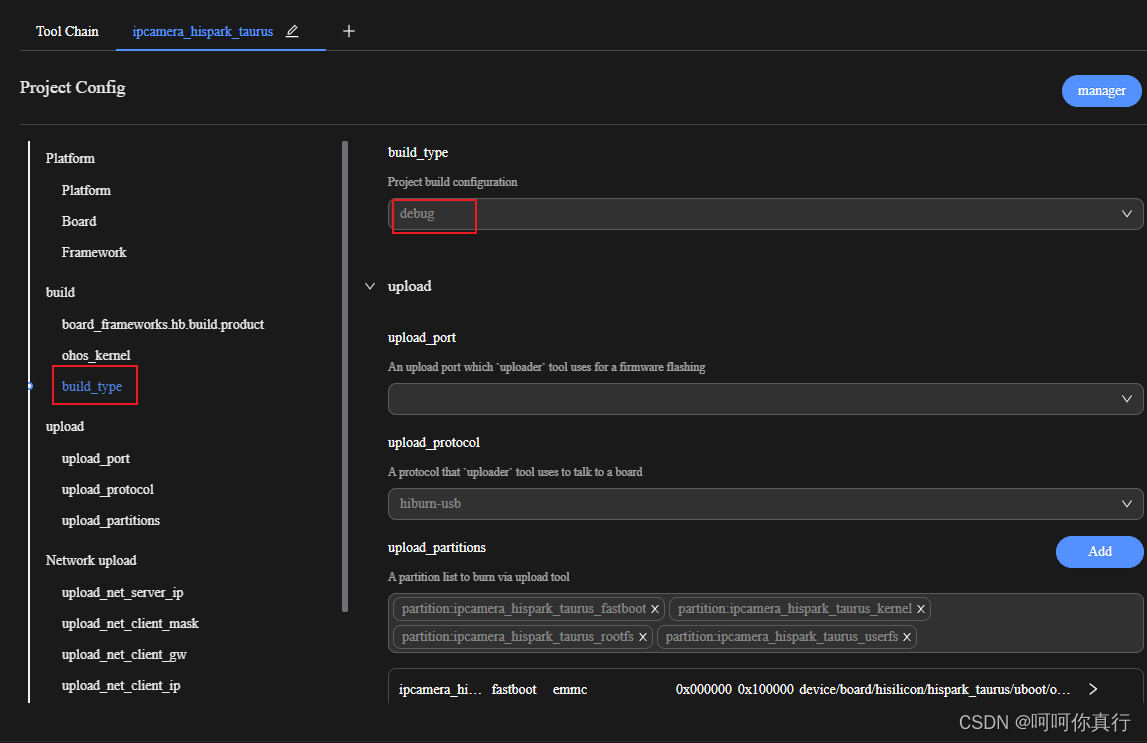
在ipcamera_hispark_taurus配置页签中,设置源码的编译类型build_type,默认为“debug”类型,请根据需要进行修改。
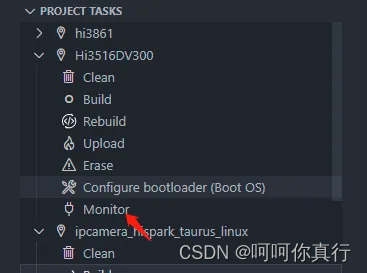
在“PROJECT TASKS”中,单击对应开发板下的Build,执行编译。

等待编译完成,在TERMINAL窗口输出“SUCCESS”,编译完成。

编译完成后,可以在工程的out目录下,查看编译生成的文件,用于后续的Hi3516DV300开发板烧录。
烧录
烧录是指将编译后的程序文件下载到芯片开发板上的动作,为后续的程序调试提供基础。DevEco Device Tool提供一键烧录功能,操作简单,能快捷、高效的完成程序烧录,提升烧录的效率。
Hi3516DV300的镜像烧录通过Windows环境进行烧录,开发者启动烧录操作后,DevEco Device Tool通过Remote远程模式,将Ubuntu环境下编译生成的待烧录程序文件拷贝至Windows目录下,然后通过Windows的烧录工具将程序文件烧录至开发板中。
Hi3516DV300开发板小型系统的烧录方式包括USB烧录、网口烧录两种方式,本文采用USB方式进行烧录。
前提条件
代码已编译完成。
安装Hi3516DV300开发板串口驱动程序
http://www.hihope.org/download/download.aspx?mtt=12

安装Hi3516DV300开发板USB驱动程序
http://www.hihope.org/download/download.aspx?mtt=11
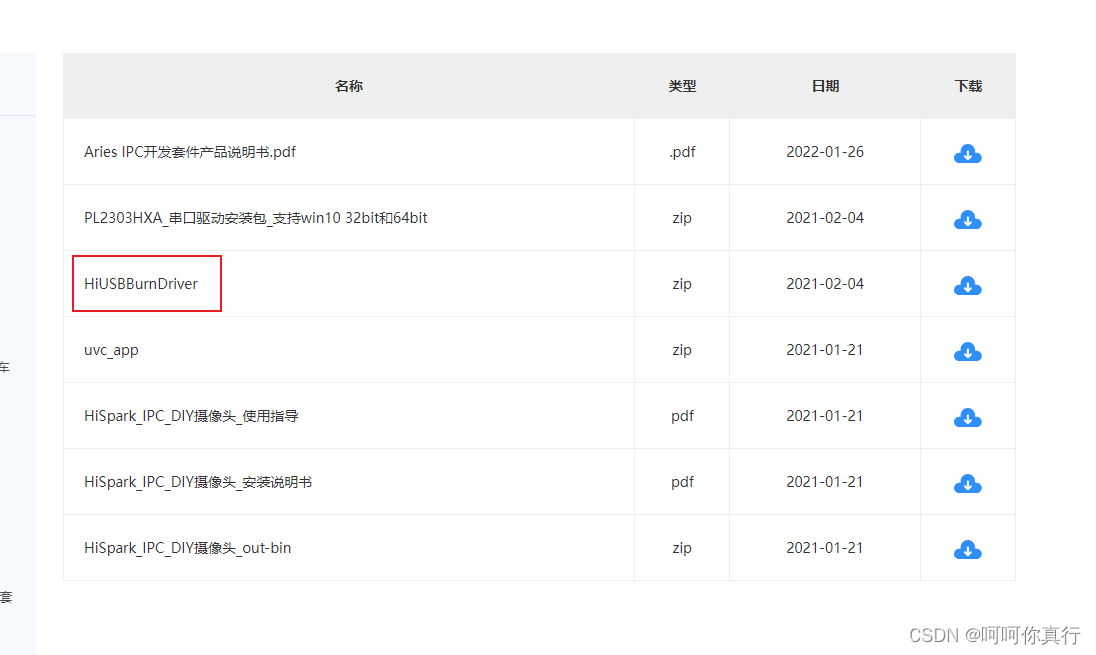
下载完成后,点击InstallDriver.exe进行安装。

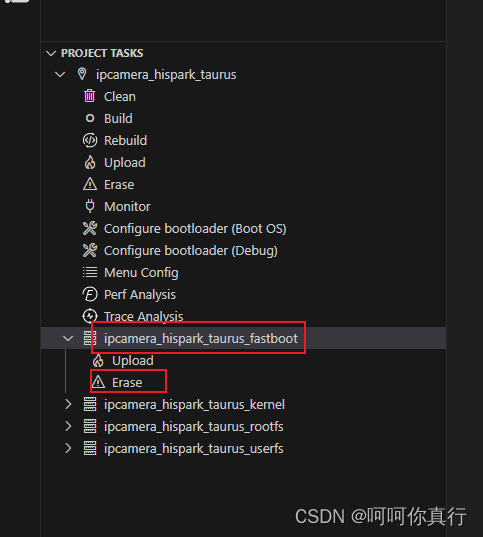
在DevEco Device Tool中,点击hi3516dv300_fastboot下的Erase按钮,擦除fastboot。
打开设备管理器,如下图所示,说明HiUSBBurn的驱动安装成功。

如果安装完HiUSBBurn驱动后,找不到上图中的驱动,请根据如下方式解决。
创建一个“文本文档.TXT”,文件后缀名修改为.reg,如usb.reg。
右键打开创建的usb.reg,将如下脚本拷贝到该文件中,然后保存并关闭。
Windows Registry Editor Version 5.00
[HKEY_LOCAL_MACHINE\SYSTEM\CurrentControlSet\Control\usbflags\12D1D0010100]
"SkipBOSDescriptorQuery"=hex:01,00,00,00
"osvc"=hex:00,00
"IgnoreHWSerNum"=hex:01
- 1
- 2
- 3
- 4
- 5
- 6
双击执行usb.reg文件,自动修改注册表文件信息。
重启电脑。
烧录操作步骤
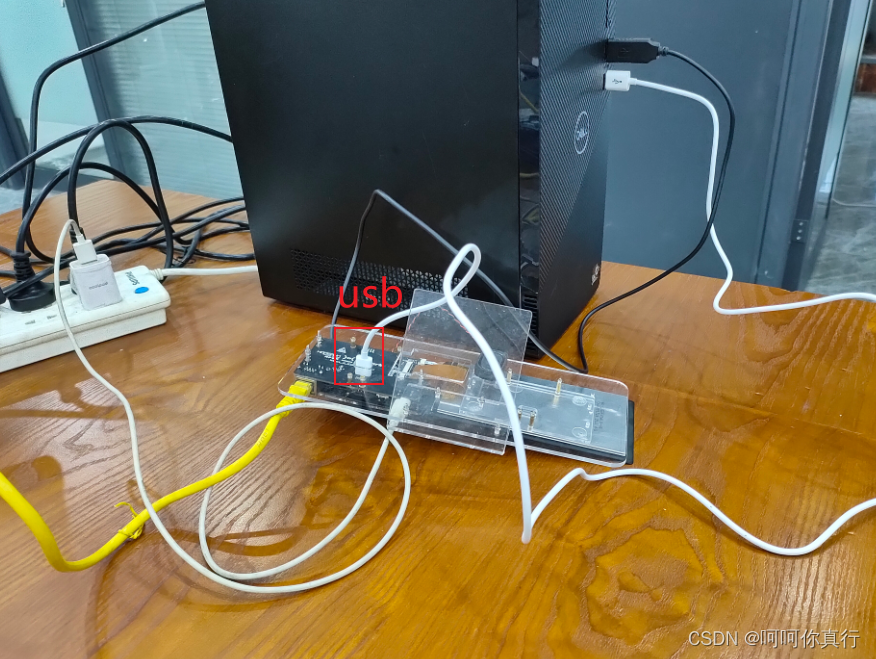
请连接好电脑和待烧录开发板,需要连接USB口和串口,具体可参考Hi3516DV300开发板介绍。

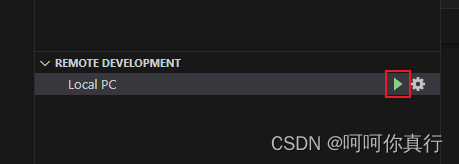
在DevEco Device Tool中,选择REMOTE DEVELOPMENT > Local PC,查看远程计算机(Ubuntu开发环境)与本地计算机(Windows开发环境)的连接状态。
如果Local PC右边连接按钮为zh-cn_image_0000001326512673,则远程计算机与本地计算机为已连接状态,不需要执行其他操作。
如果Local PC右边连接按钮为zh-cn_image_0000001275432904,则点击绿色按钮进行连接。连接时DevEco Device Tool会重启服务,因此请不要在下载源码或源码编译过程中进行连接,否则会中断任务。

在菜单栏中点击Project Settings按钮,进入Hi3516DV300工程配置界面。

在“Tool Chain”页签,检查Uploader烧录器工具是否已安装。


在“ipcamea_hispark_taurus”页签,设置烧录选项,包括upload_partitions、upload_port和upload_protocol。配置完成后工程将自动保存。
upload_partitions:选择待烧录的文件,默认情况下会同时烧录fastboot、kernel、rootfs和userfs。DevEco Device Tool已预置默认的烧

upload_protocol:选择烧录协议,固定选择“hiburn-usb”。
upload_port:选择已查询到的串口号。
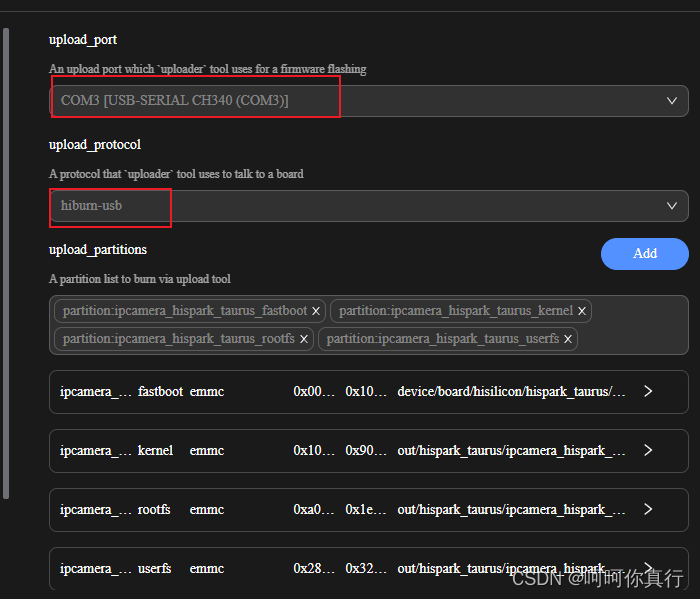
点击ipcamera_hispark_taurus下的Upload按钮。

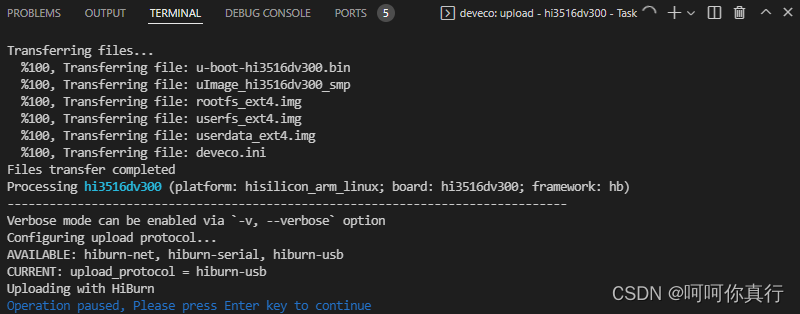
此时待烧录文件会从Ubuntu系统传输到Windows下,传输完成后界面显示“Operation paused, Please press Enter key to continue”时,请点击Enter键启动烧录。
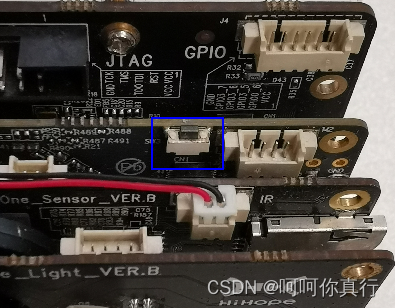
在终端窗口显示如下提示信息时,请在15秒内,按住Update键(位置如下图),插拔USB线,最后松开Update键启动烧录。

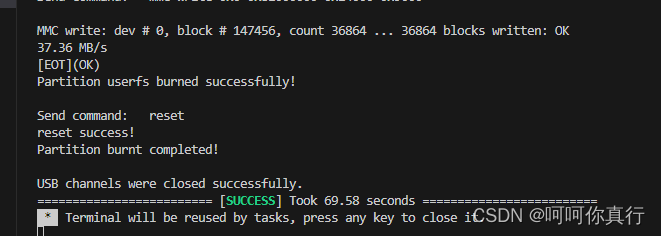
启动烧录后,界面提示SUCCESS信息时,表示烧录成功。
运行
启动系统
在完成Hi3516DV300的烧录后,还需要设置BootLoader引导程序,才能运行OpenHarmony系统。
在Hi3516DV300任务中,单击Configure bootloader(Boot OS)进行配置即可。
icon-note.gif 说明: DevEco Device Tool针对Hi3516DV300开发板的BootLoader设置进行了适配,无需开发者手动修改。

提示如下图中的重启开发板的提示信息时,重启开发板(跟烧录一样,按住Update键,插拔USB线,最后松开Update),然后在控制台输出“SUCCESS”表示设置成功。


在任务栏单击Monitor按钮,启动串口工具。
重启开发板,在倒计时结束前,按任意键进入系统。

通过以下两条命令设置启动参数。
setenv bootargs 'mem=640M console=ttyAMA0,115200 mmz=anonymous,0,0xA8000000,384M clk_ignore_unused rootdelay=10 hardware=Hi3516DV300 init=/init root=/dev/ram0 rw blkdevparts=mmcblk0:1M(boot),15M(kernel),20M(updater),2M(misc),3307M(system),256M(vendor),-(userdata)';
- 1
setenv bootcmd 'mmc read 0x0 0x82000000 0x800 0x4800; bootm 0x82000000'
- 1
保存参数设置。
save
- 1
重启开发板,完成系统启动
reset
- 1

启动后在LCD屏即可以看到开机显示,标准系统对比起小型系统会有点卡顿。


参考资料
[1] https://blog.51cto.com/harmonyos/5533313

