- 1Nginx 配置长连接_nginx和下游是否需要长连接
- 2docker查看容器详细信息_测试需要掌握docker的一些基本命令
- 3什么是 VitePress?
- 4Python实现逻辑回归算法(一)_基于python的逻辑回归算法
- 5安卓调用onnx模型并计算_android onnx
- 6Android中Jni学习总结--Jni中打印log信息_android jni log
- 7使用python构建Android,探索跨平台应用开发Kivy框架_kivy designer
- 8深入解析MySQL的层次化设计
- 9对话朱嘉明:元宇宙的商业前景、技术路径和治理规则_元宇宙是技术集大成者
- 10今日arXiv最热NLP大模型论文:大语言模型为什么始终会产生幻觉_asr模型幻觉问题严重
yolov5驾驶员不规范行为检测_驾驶员行为检测 csdn
赞
踩
1 项目介绍
1.1 摘要
随着汽车工业的迅速发展和交通拥堵的加剧,驾驶员在行车过程中的不规范行为成为了导致交通事故频发的重要因素之一。为了减少交通事故的发生,保障道路安全,提高驾驶员的行车安全意识,本研究致力于实现驾驶员不规范行为的自动检测[1]。通过利用先进的人工智能和计算机视觉技术,可以实时监控驾驶员的行为,及时发现并纠正不规范行为,从而降低事故风险。
本课题的主要目标是开发一个基于YOLOV5、Dlib、OpenCV及PySide技术的驾驶员不规范行为自动检测系统。该系统能够准确识别驾驶员的多种不规范行为,如分心驾驶、疲劳驾驶、超速行驶等,并通过图形用户界面实时展示检测结果。通过此系统,期望能够提升驾驶员的安全意识,降低交通事故的发生率。
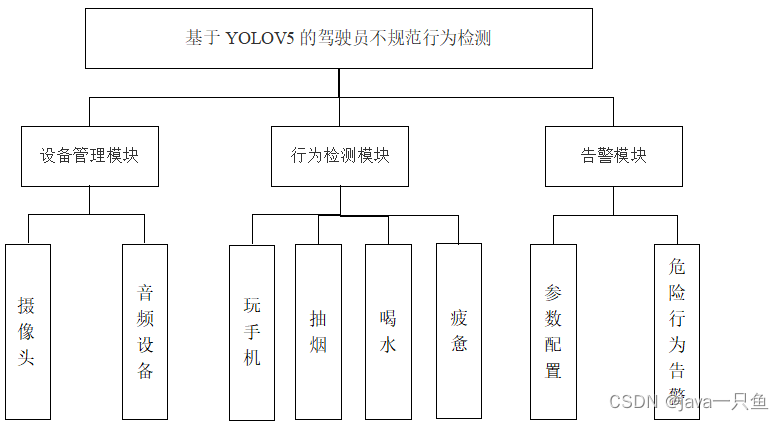
首先,对YOLOV5、Dlib、OpenCV及PySide等技术进行了深入研究和理论分析。YOLOV5作为一种高效的目标检测算法,具有快速准确的特点;Dlib则提供了强大的图像处理功能,如人脸检测、特征点定位等;OpenCV在计算机视觉领域有着广泛的应用,为图像处理提供了丰富的工具和算法;而PySide则用于构建图形用户界面,方便用户与系统进行交互。在明确了驾驶员不规范行为的定义与分类后,基于YOLOV5构建了驾驶员不规范行为检测模型[2]。在数据集准备阶段,收集了大量包含不同不规范行为的驾驶员图像和视频数据,并进行了标注和预处理。在模型架构设计方面,根据YOLOV5的原理和驾驶员行为的特点,设计了合适的网络结构。在训练优化过程中,采用了多种优化算法和技巧,以提高模型的检测精度和鲁棒性。随后,实现了驾驶员不规范行为检测系统。系统框架包括图像采集模块、图像处理模块、行为检测与识别模块以及结果展示模块。图像采集模块通过摄像头实时获取驾驶员的驾驶画面;图像处理模块利用Dlib和OpenCV对图像进行预处理和特征提取;行为检测与识别模块基于训练好的YOLOV5模型进行行为检测,并输出检测结果;结果展示模块通过PySide构建的图形用户界面将检测结果实时展示给用户。
通过系统测试,验证了本研究的驾驶员不规范行为自动检测系统的有效性。该系统能准确识别多种不规范行为,实时展示在图形用户界面上,相比传统方法,具有更高的精度和更低的误报率。系统实时性和稳定性良好,满足实际应用需求。主要成果包括成功实现基于YOLOV5、Dlib、OpenCV及PySide技术的检测系统。然而,系统在复杂场景下精度可能受影响,扩展性和通用性需提升。未来将继续优化系统,并期待与更多研究者合作,推动技术发展。
1.2 系统技术栈
YoloV5
Dlib
OpenCV
Python
1.3 数据集采集流程

1.4 系统功能框架图