
热门标签
热门文章
- 1安装LLaMA-Factory微调chatglm3,修改自我认知_python src/export_model.py \ --model_name_or_path
- 2Jetson Nano B01部署YOLOv5项目全流程(五)TensorRT加速配置_yolov5 jetson nano
- 3Qt文件操作
- 4Ubuntu NVIDIA-Docker安装_ubuntu安装nvidia-docker
- 5Win7系统应用技巧集锦_repair是在d盘吗
- 6搭建 PXE 服务器(基于 Ubuntu 22.04,支持 IPv4/6 及 Legacy/UEFI)_ubuntu pxe
- 7ssh: connect to host ip port 22: Connection timed out_ssh: connect to host port 22: connection timed out
- 8数据库实验二——SQL查询语言_查询'计算机系'和'信息系',年龄在18到20岁的学号,姓名、所在系和年龄
- 9【Flutter】Flutter 实现 Text 自动换行 解决长文本溢出问题_flutter text 自动换行
- 101480. 一维数组的动态和_具体的一维数组动态和
当前位置: article > 正文
【北邮鲁鹏老师计算机视觉课程笔记】04 fitting 拟合
作者:从前慢现在也慢 | 2024-02-13 00:40:27
赞
踩
【北邮鲁鹏老师计算机视觉课程笔记】04 fitting 拟合
【北邮鲁鹏老师计算机视觉课程笔记】04 fitting 拟合
1 拟合的任务
 如何从边缘找出真正的线?
如何从边缘找出真正的线?
存在问题
①噪声
②外点、离群点
③缺失数据
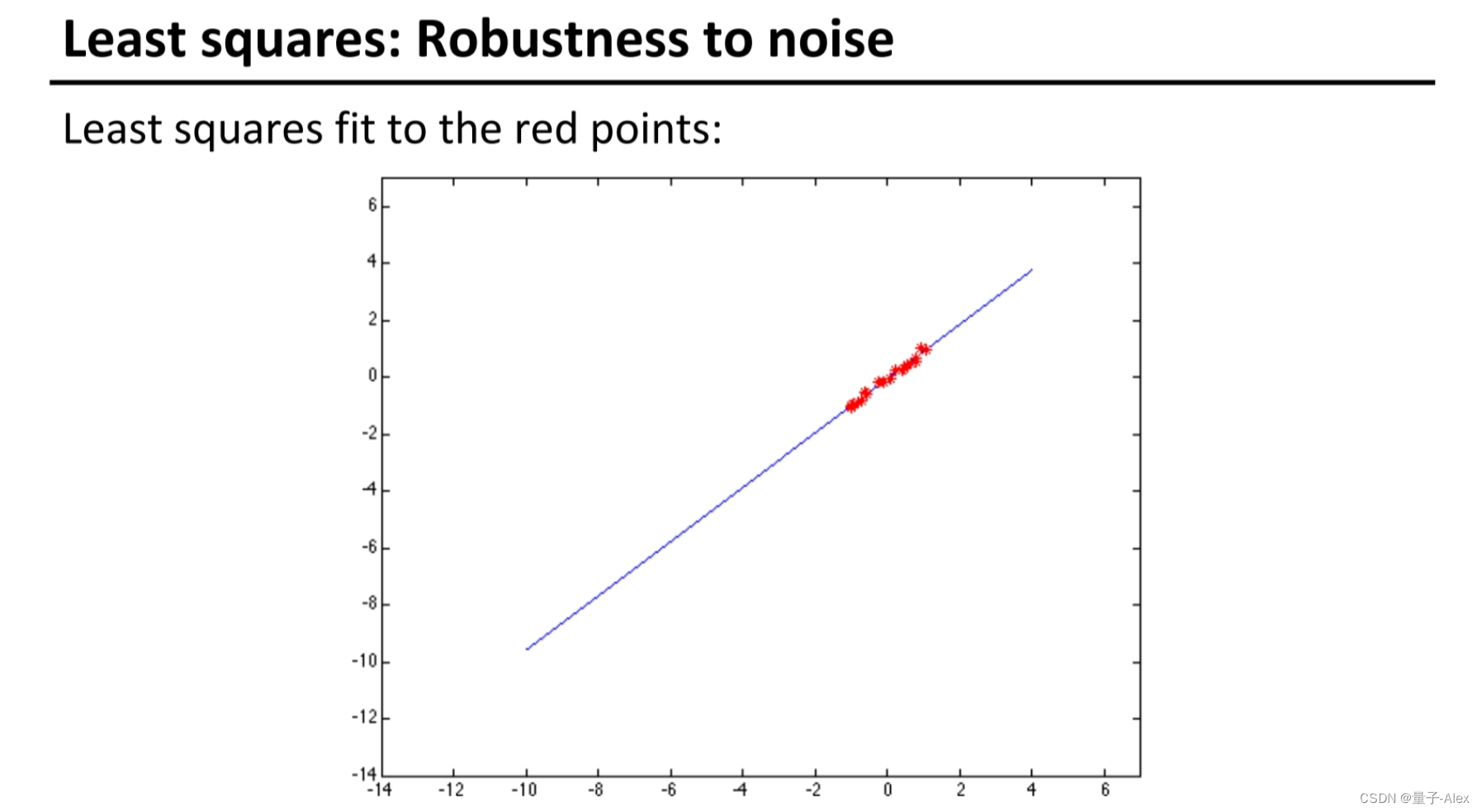
2 最小二乘
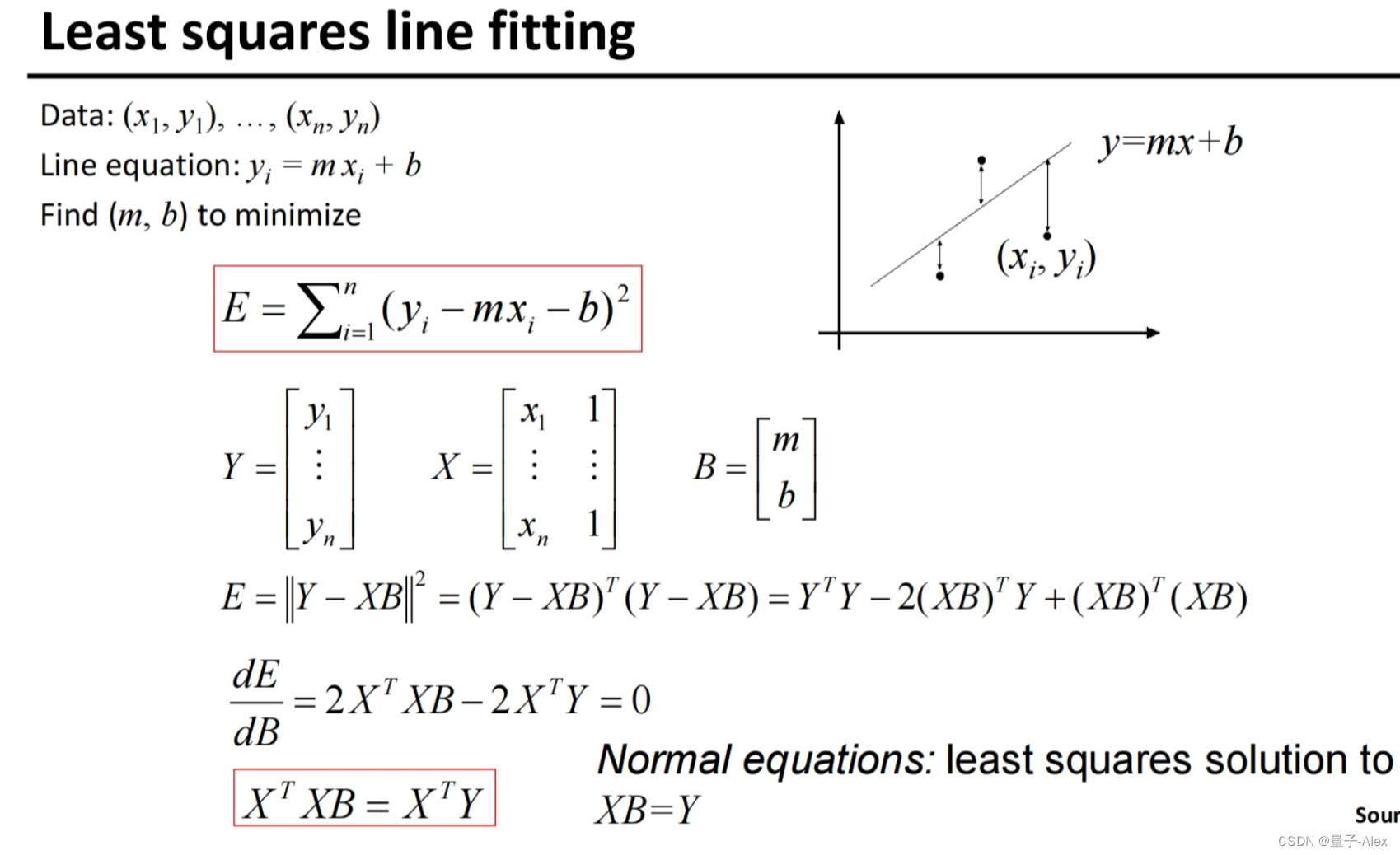
存在的问题
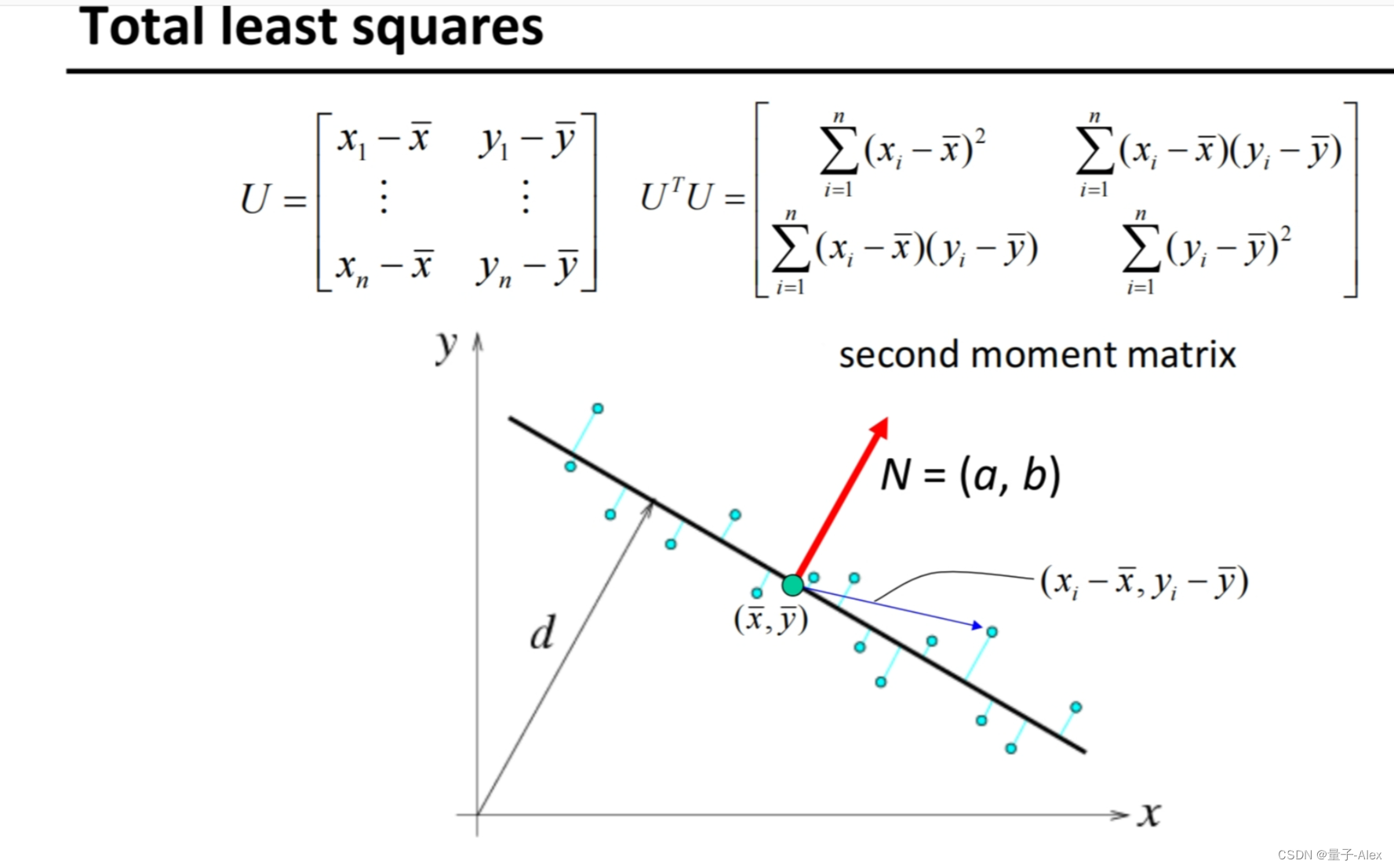
3 全最小二乘
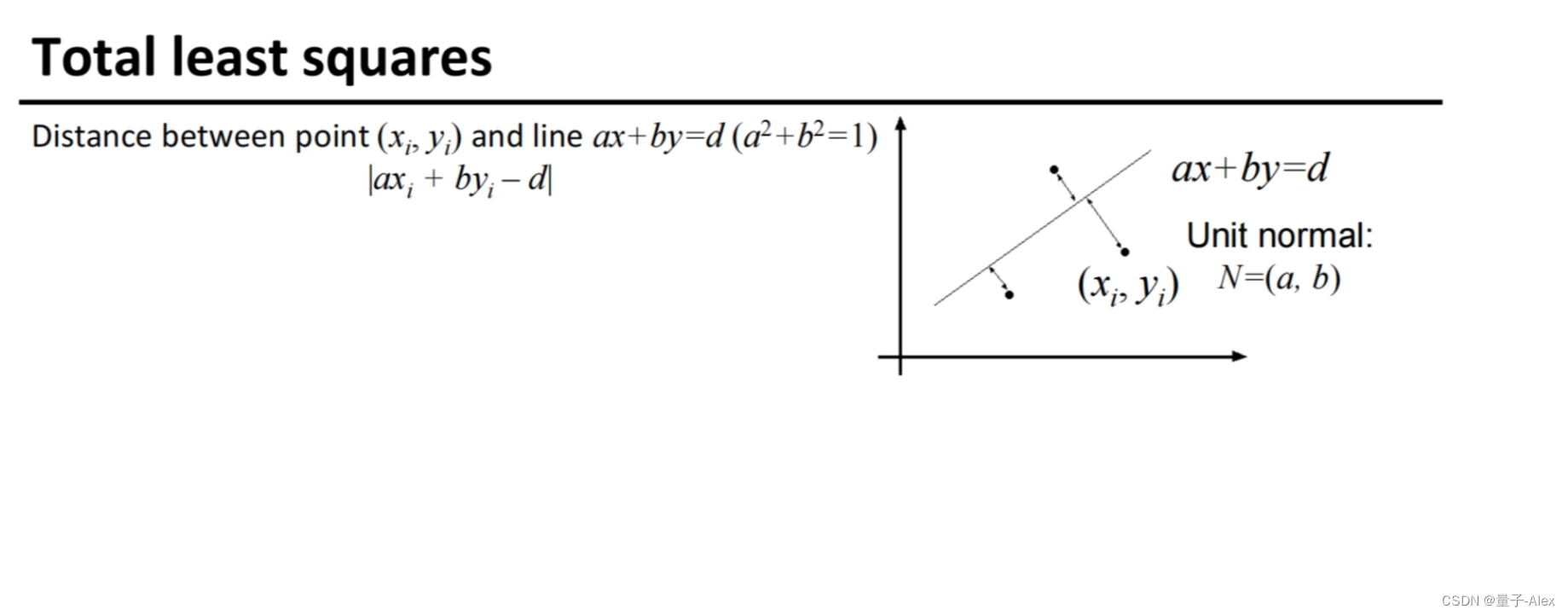
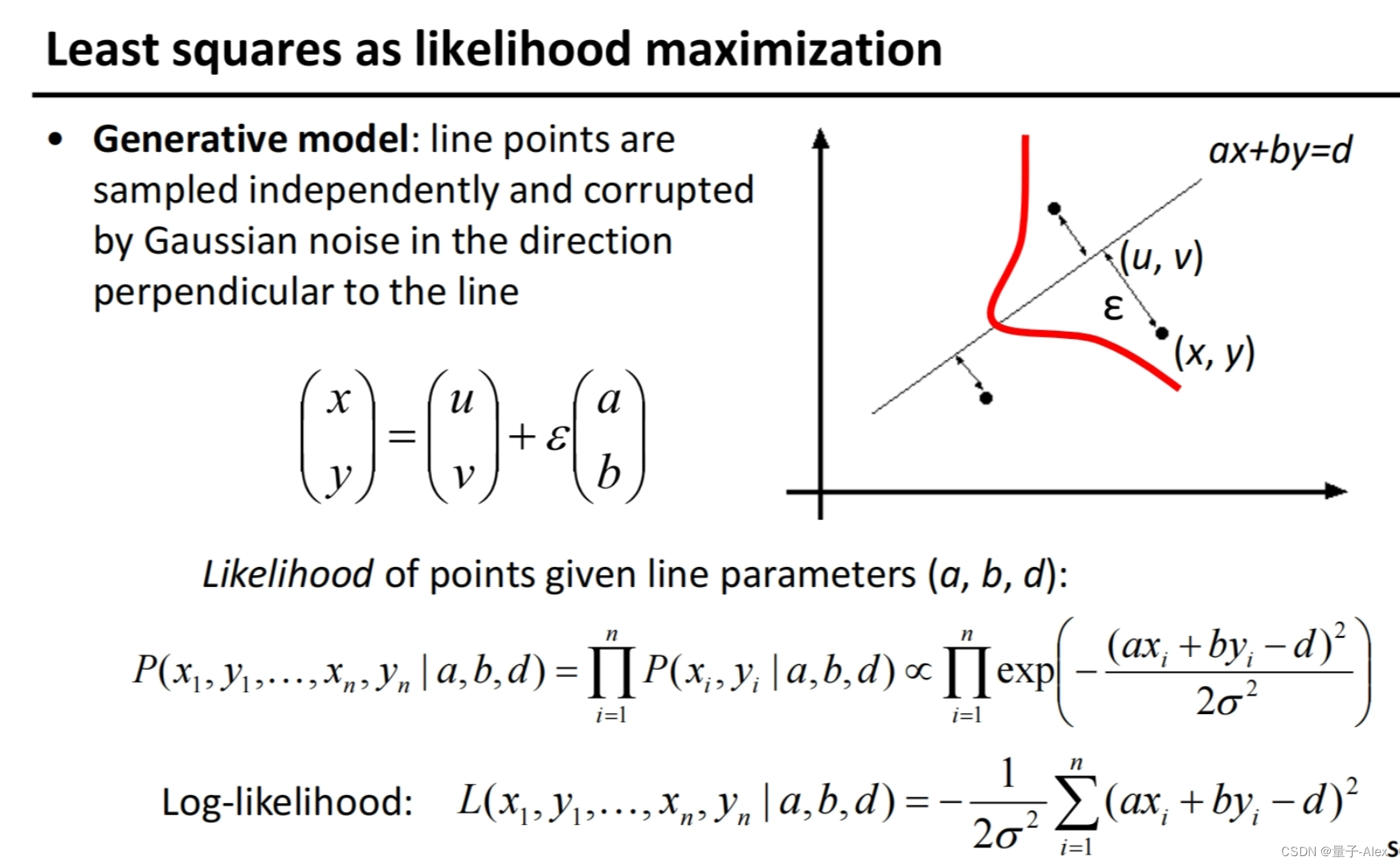
度量的是点到直线的距离而不是点在y方向到直线的距离
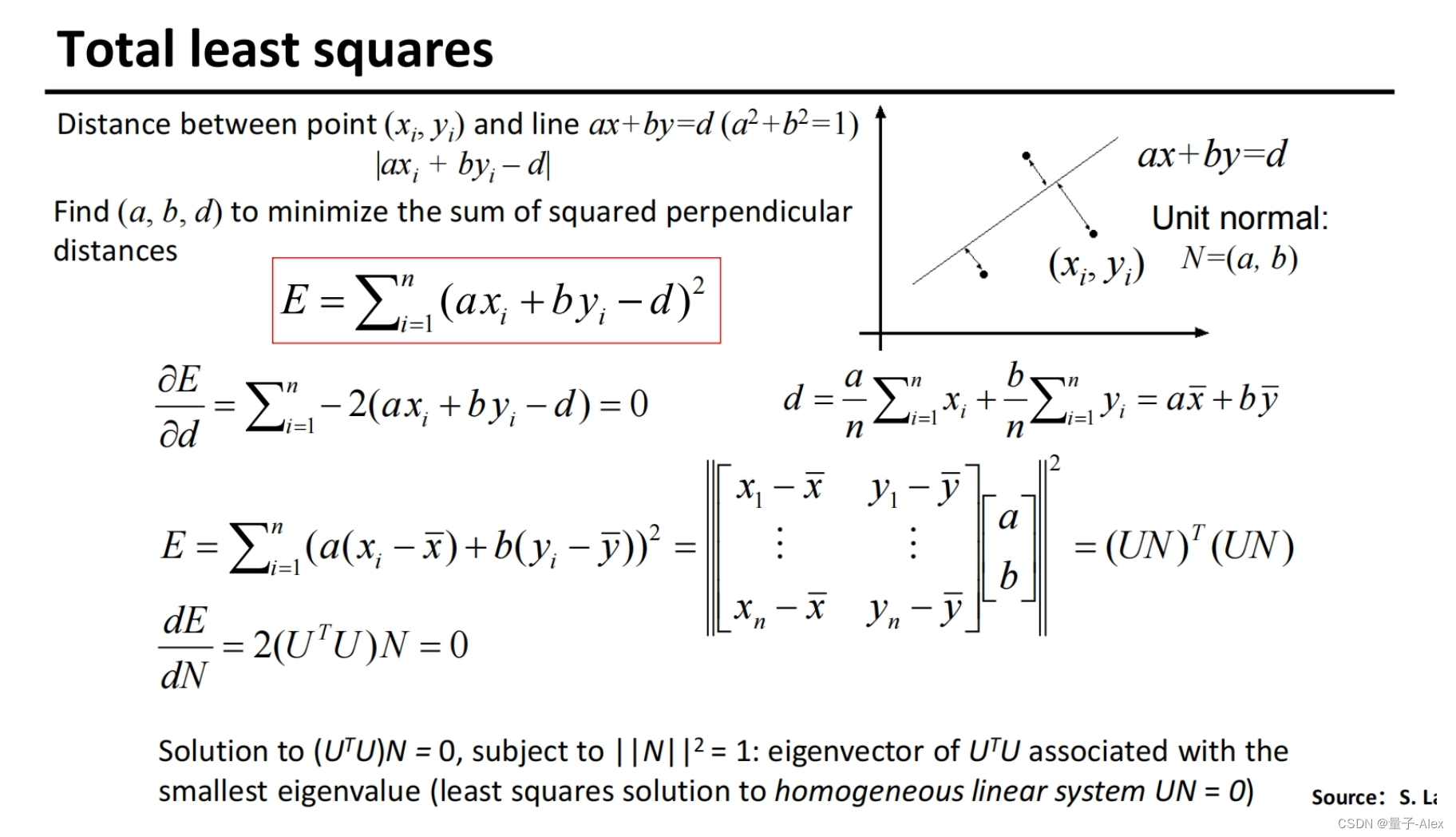
提示:点到直线的距离公式
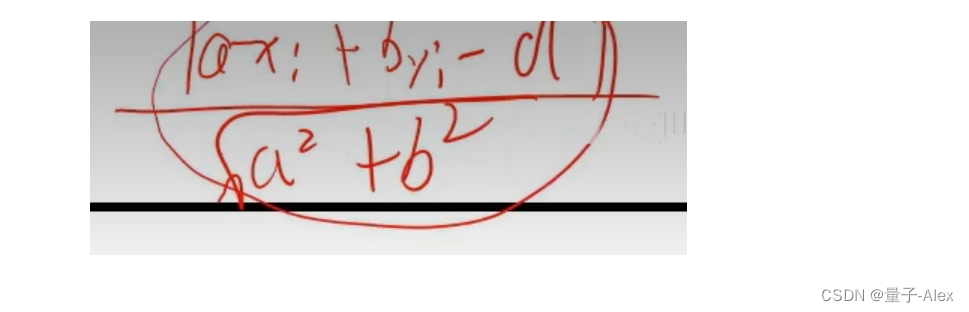
归一化后保留分子
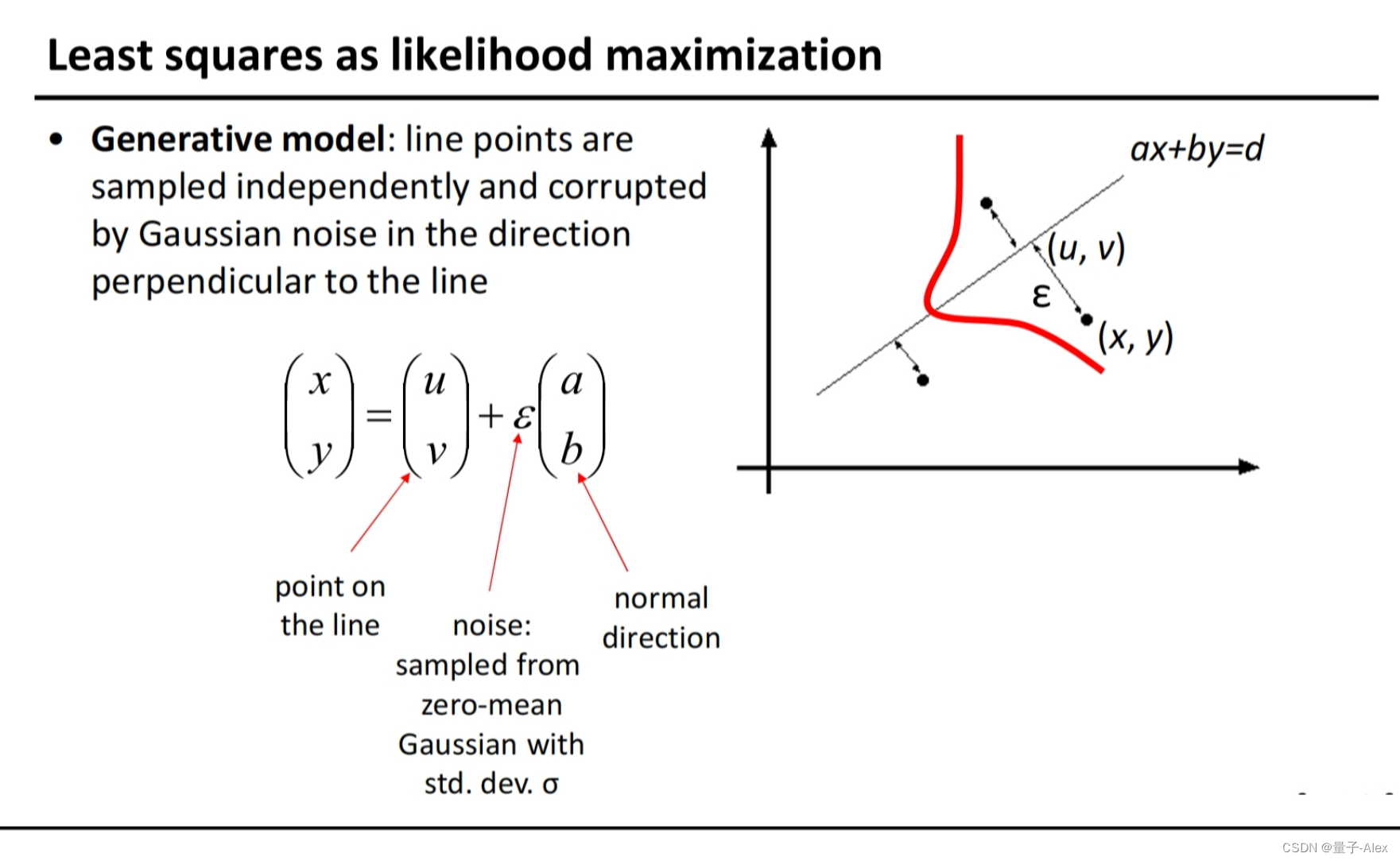
4 极大似然估计
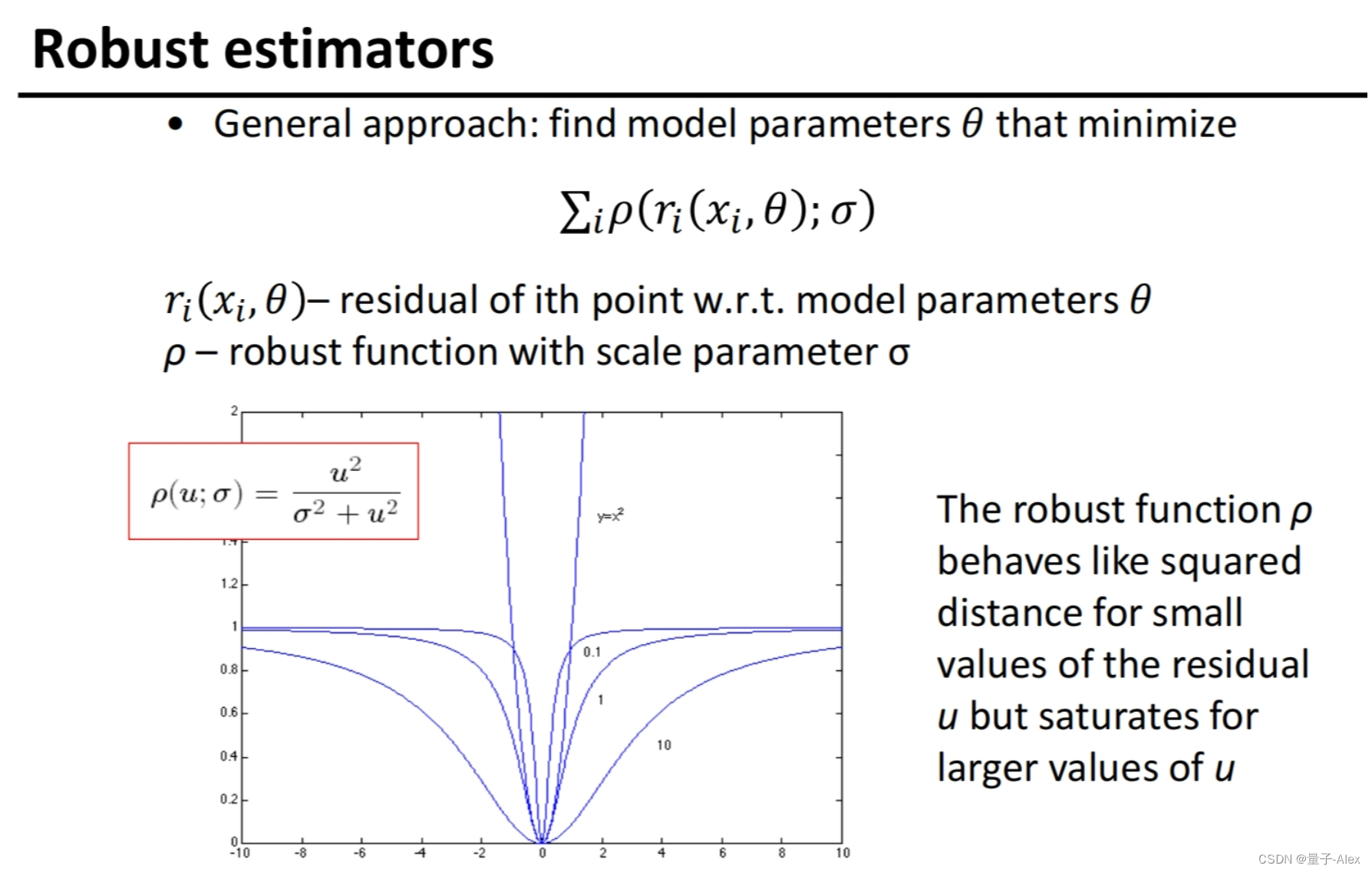
5 鲁棒的最小二乘
不直接用点到直线的距离
σ
\sigma
σ来控制点到直线距离的影响,太远的点就是噪声点,就不考虑了。r=10的时候,也认为偏离是1,相当于抑制了噪声点
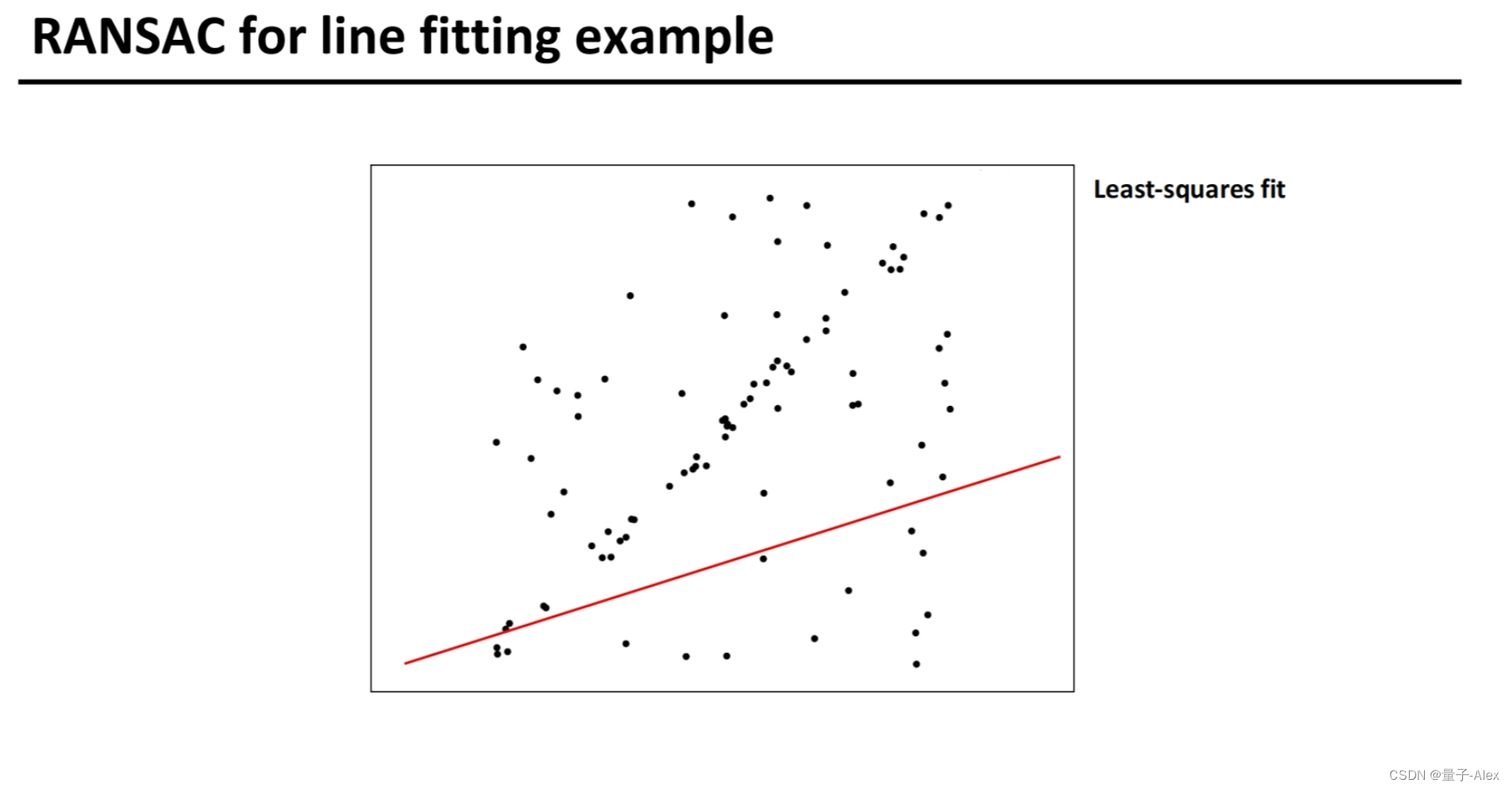
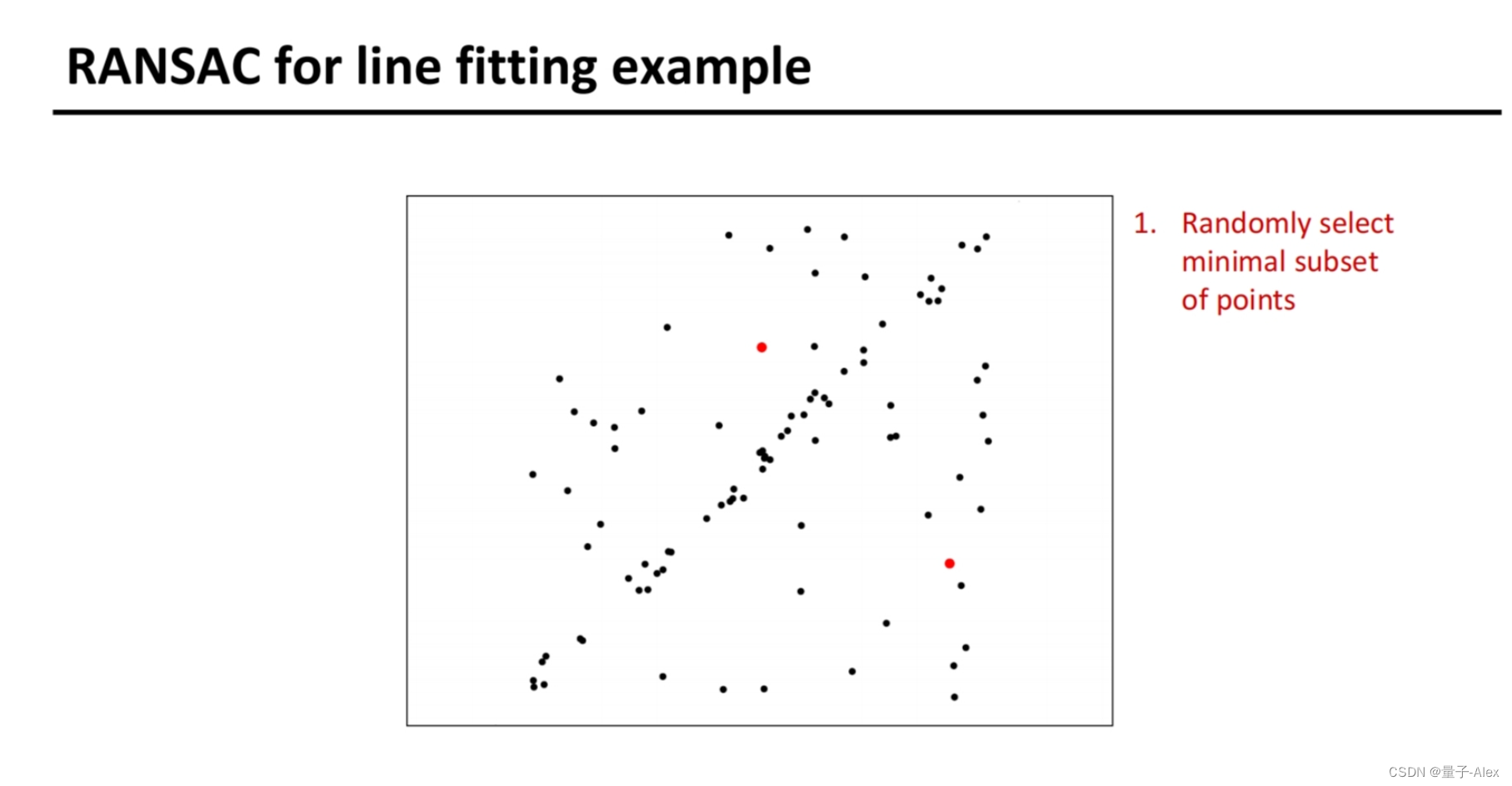
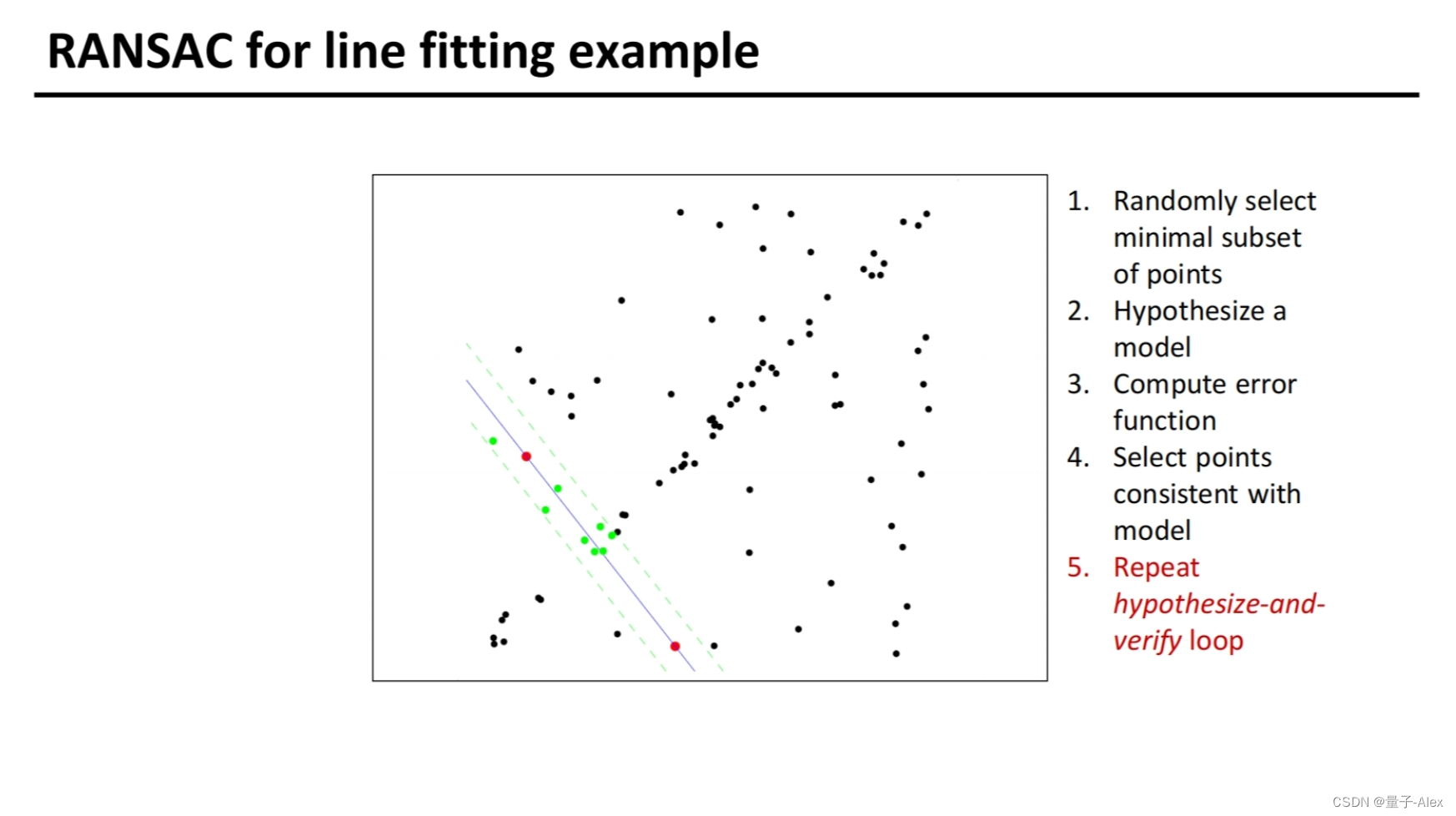
6 RANSAC

对于外点比较多的情况比较合适。
随机采样一致性算法
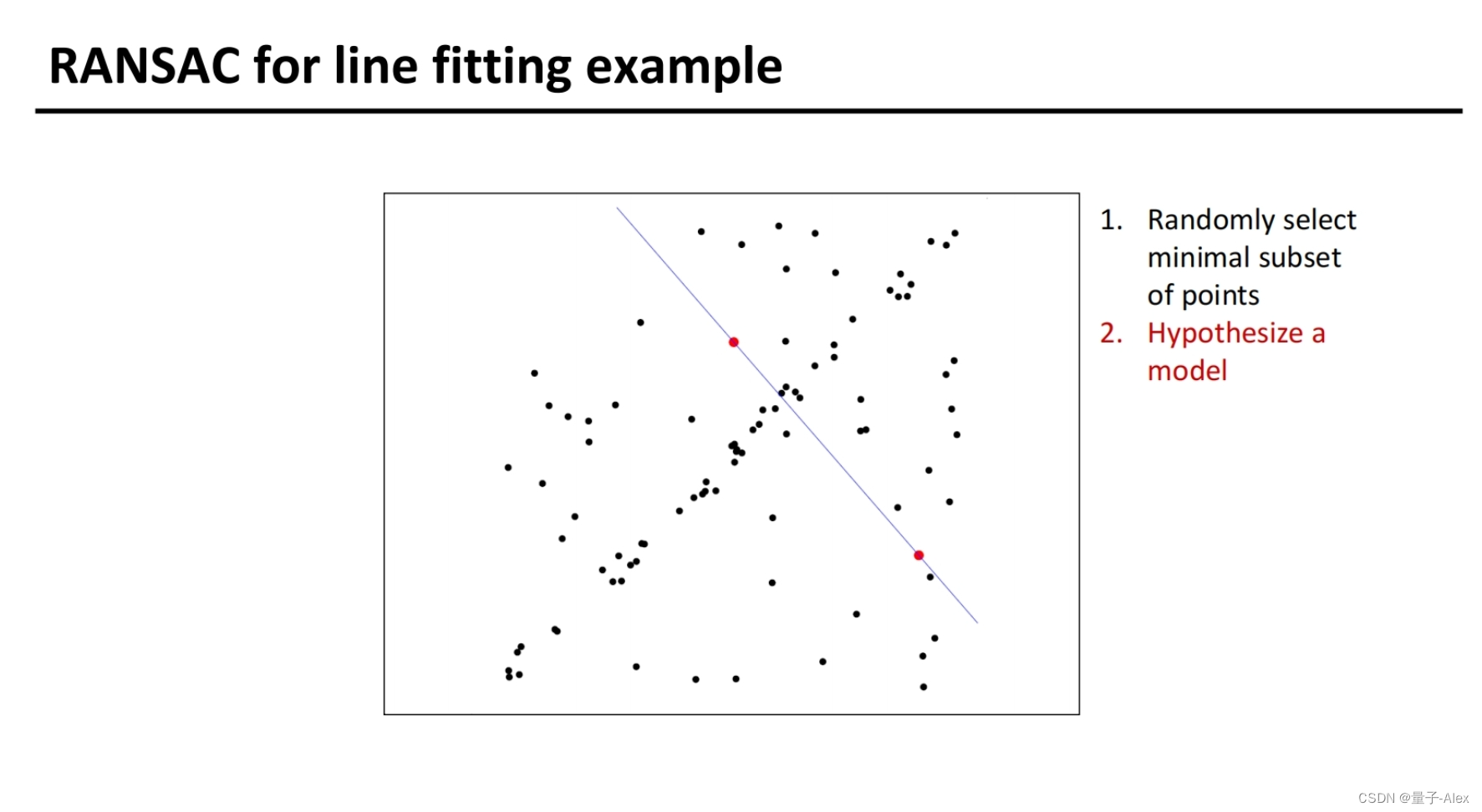
①选择一个最小的集合:2个点(2点确定一条直线)
②用这个最小的集合拟合一条直线
③剩下的点给这个直线投票,就是看剩下的点到直线的距离之和
④重复上3个步骤
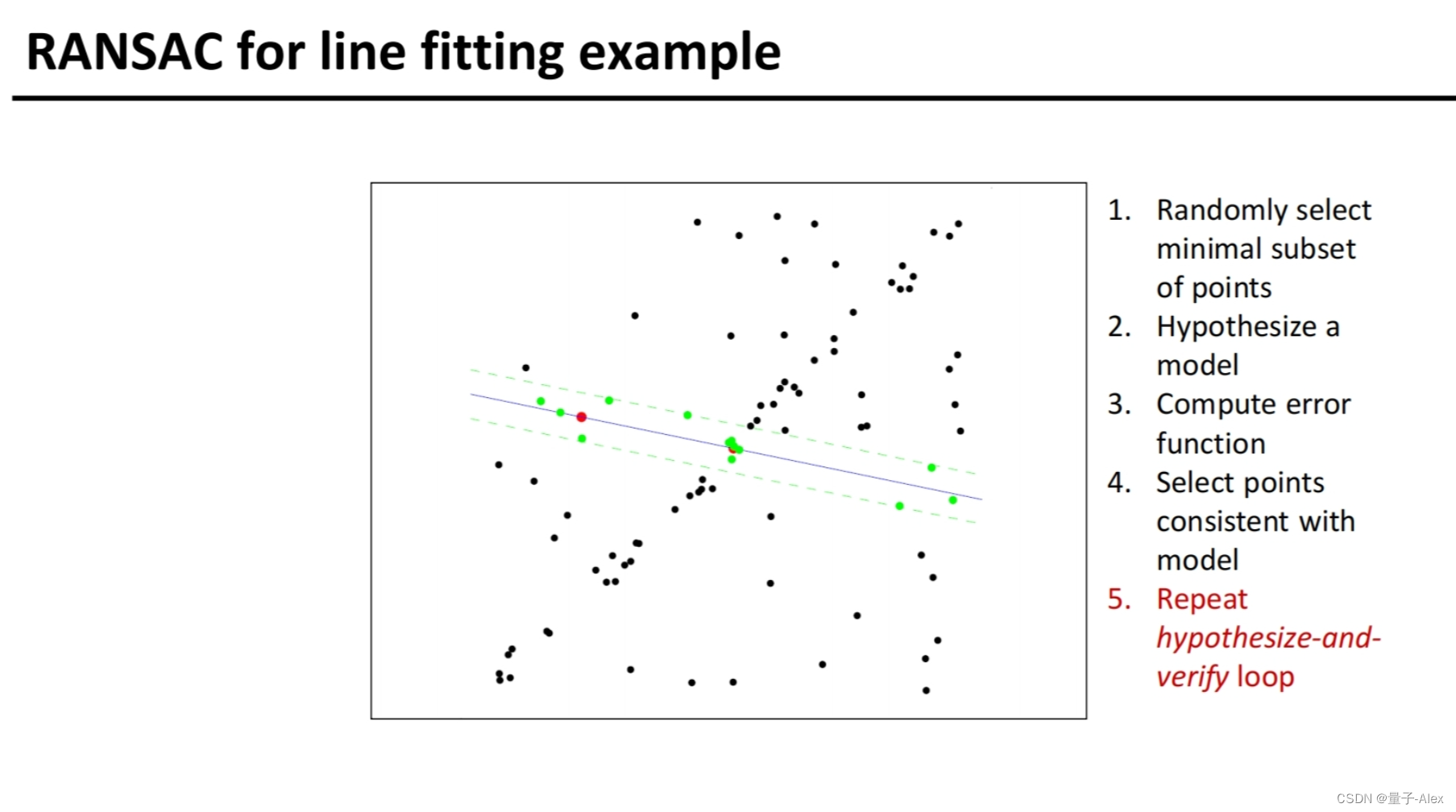
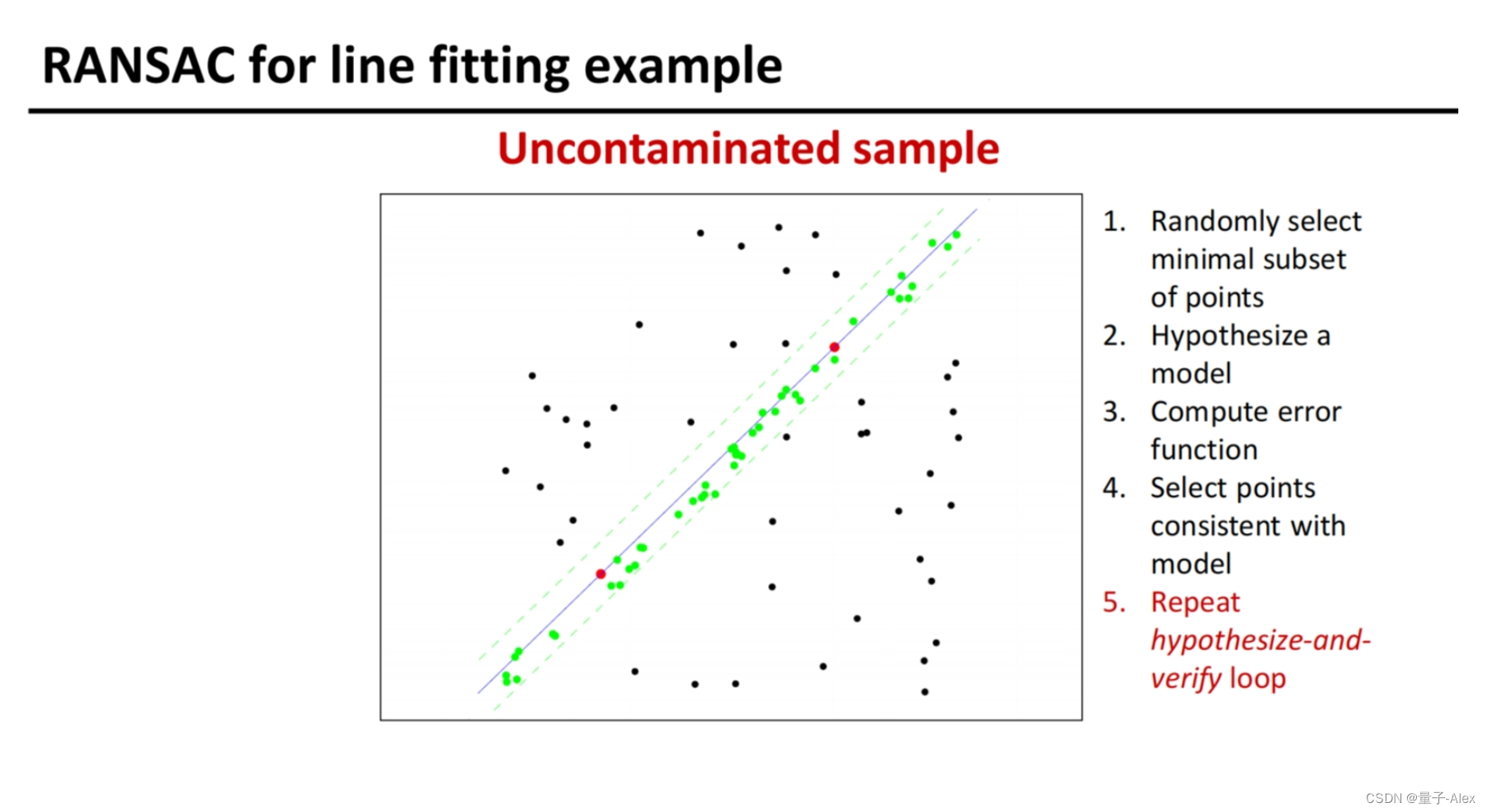
例子:
随机选两个点,确定一条直线
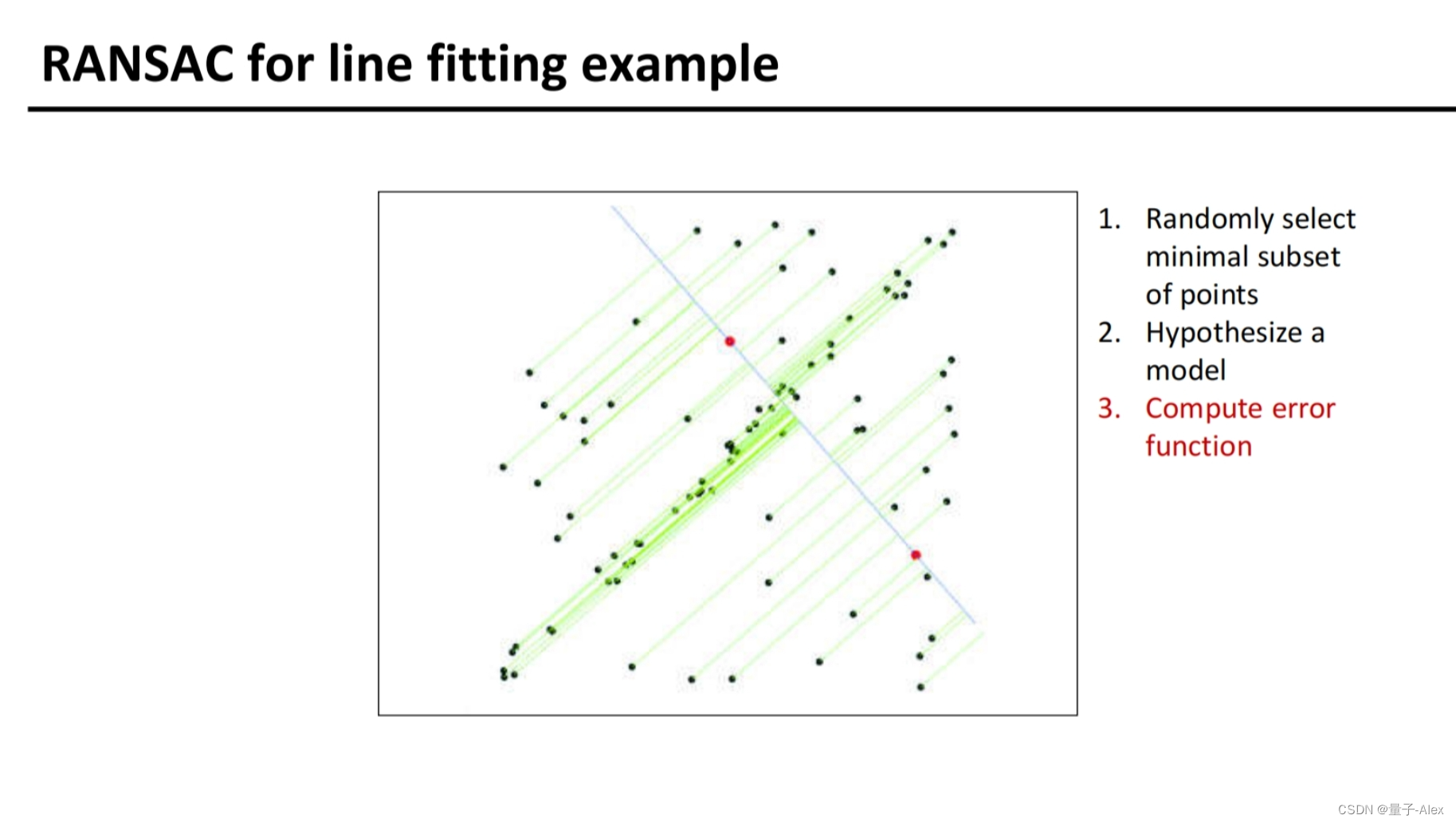
计算剩下的点到直线的距离
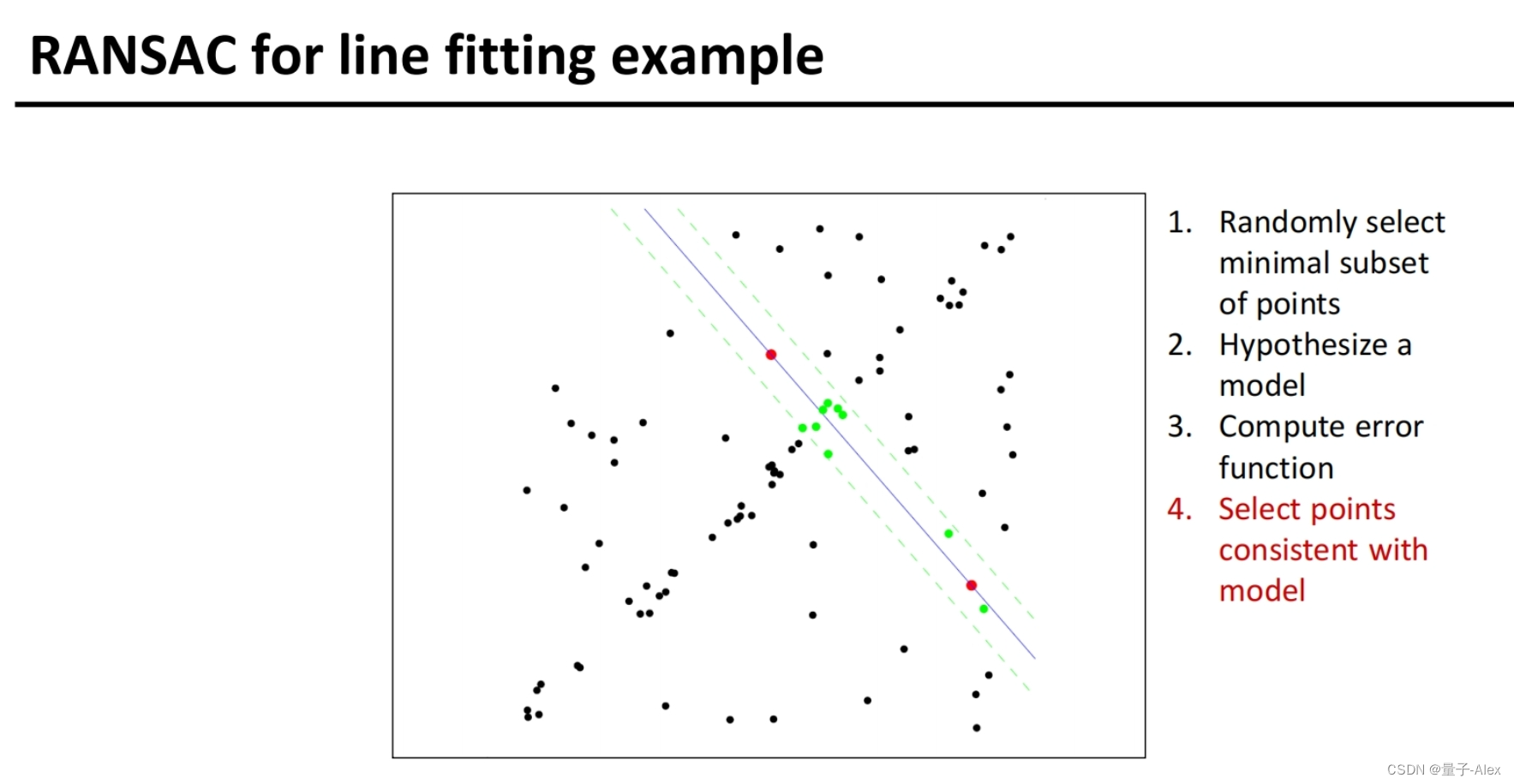
重复上述步骤
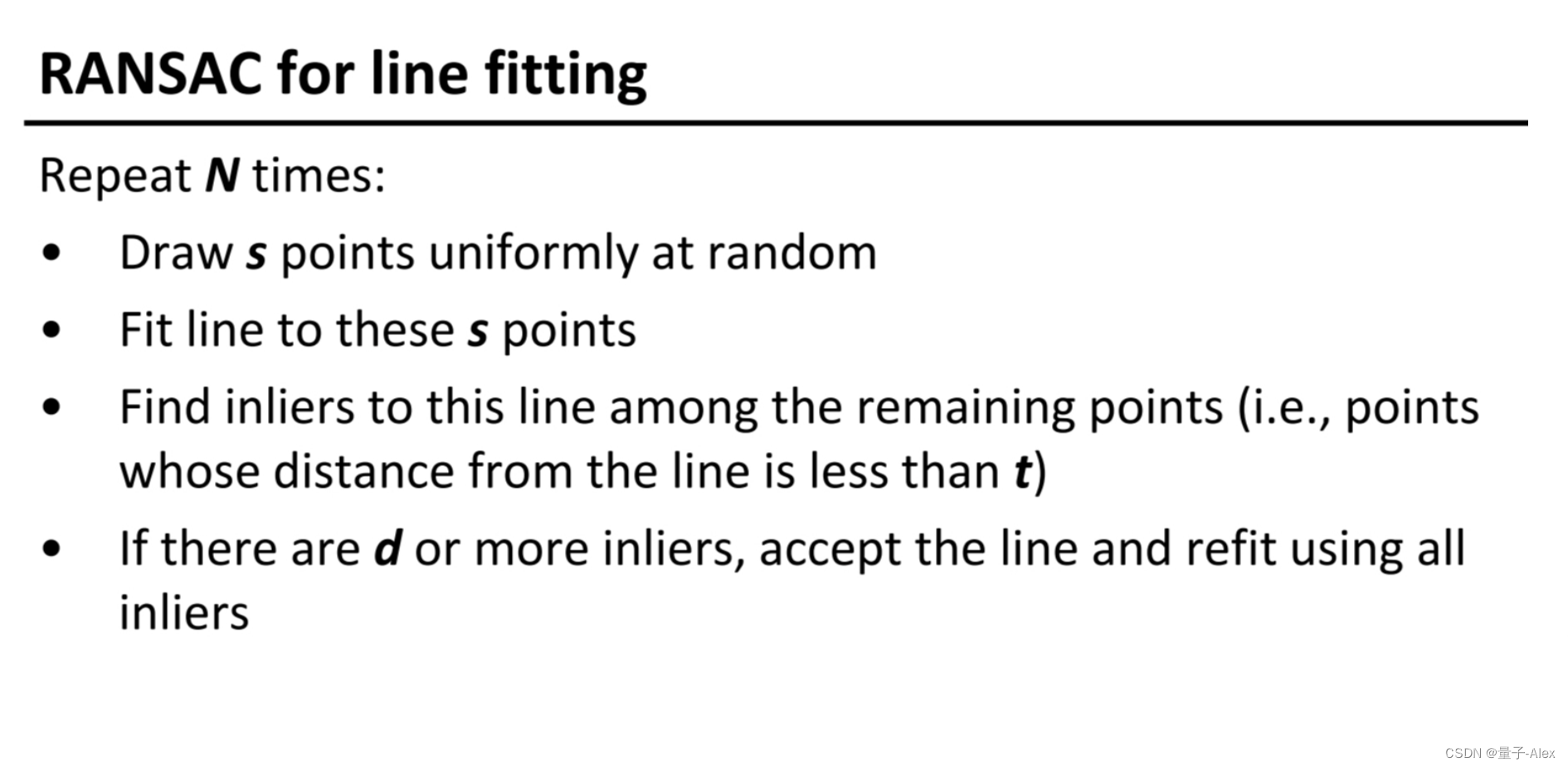
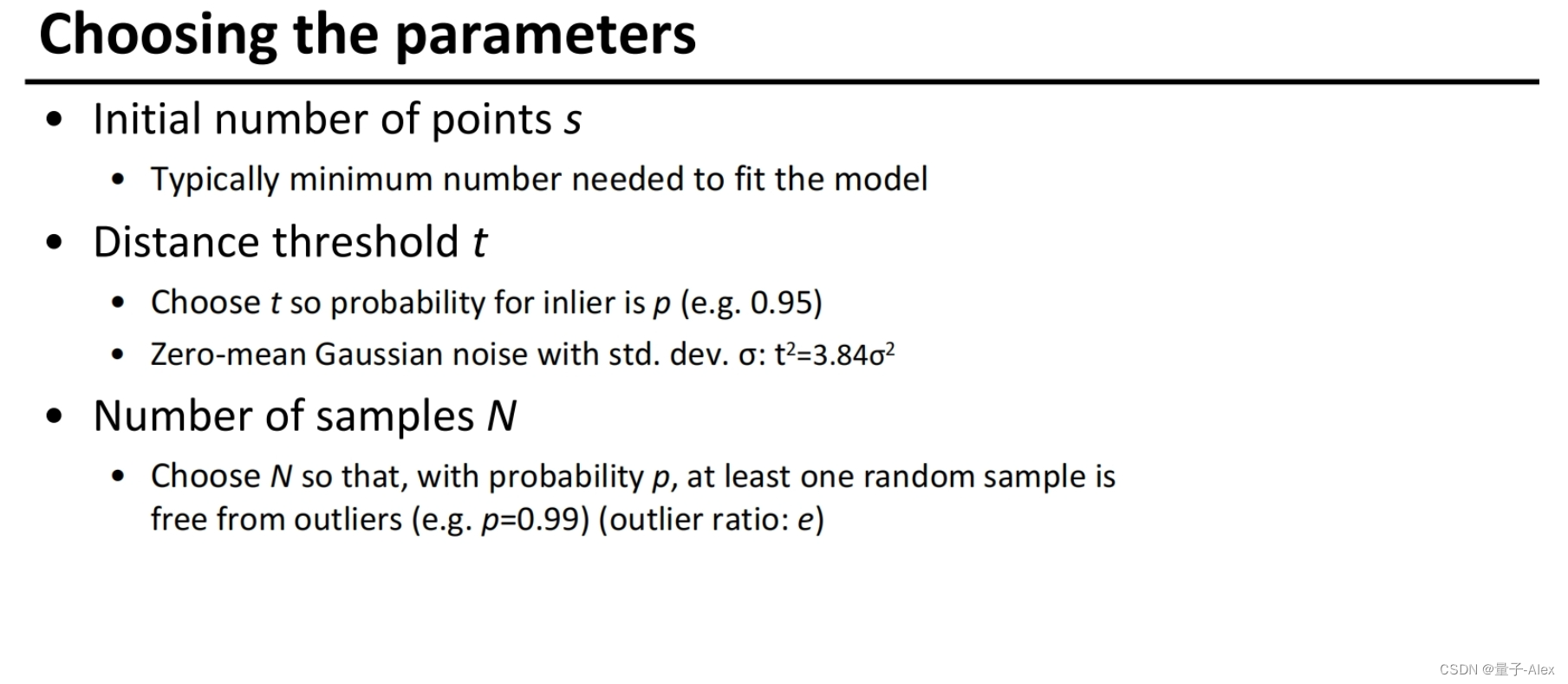
7 RANSAC算法参数的选择
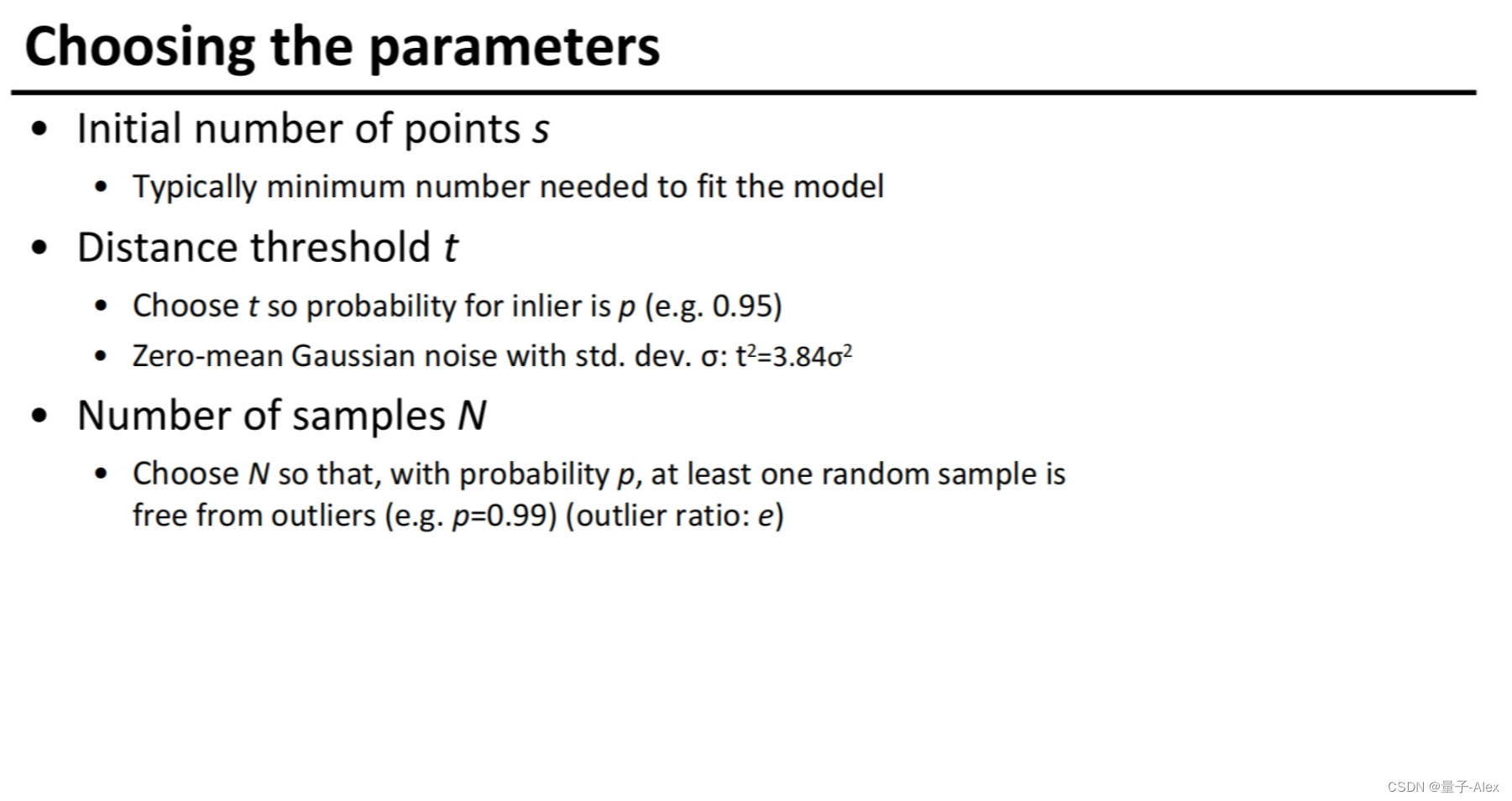
8 RANSAC的参数
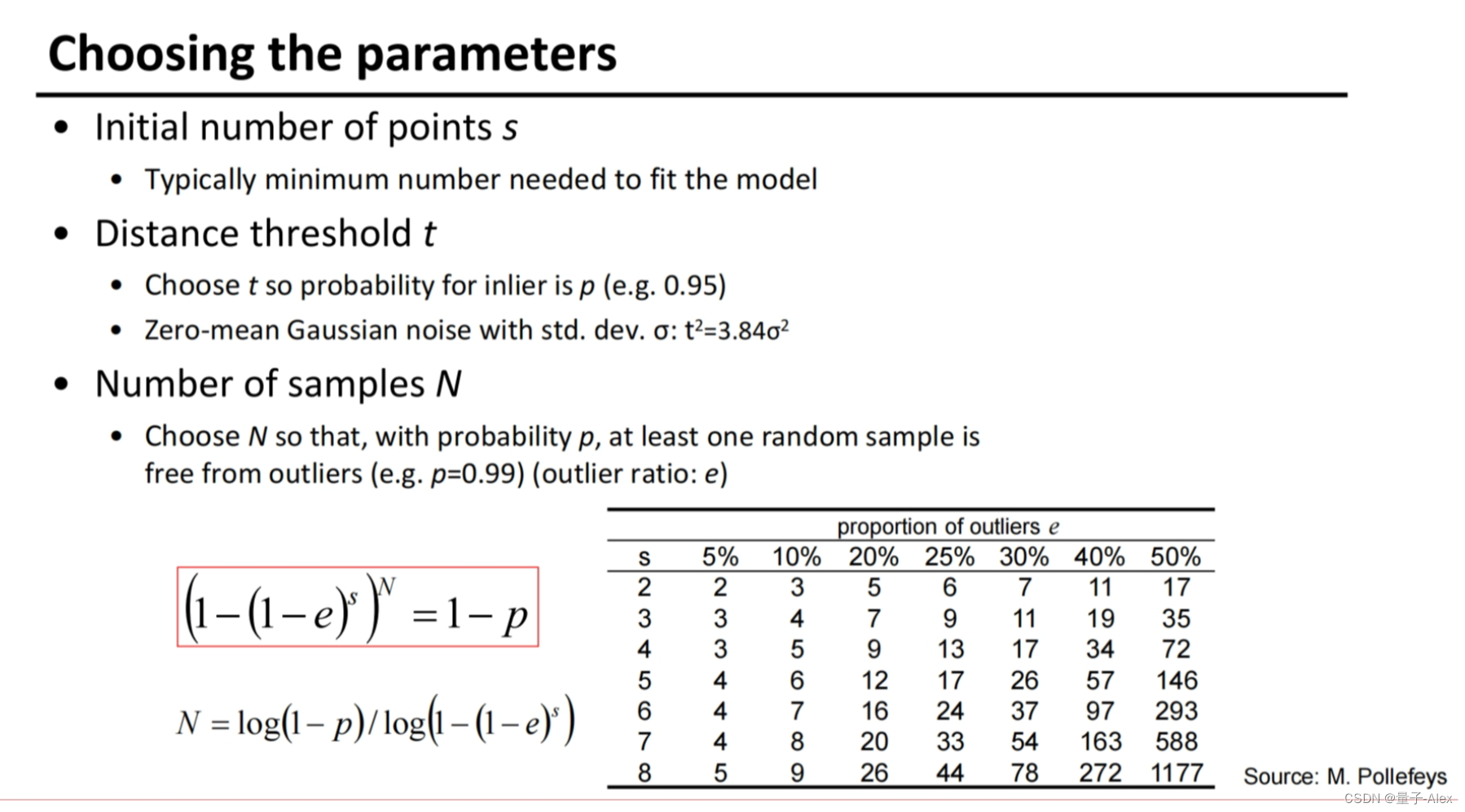
外点率e越高,需要迭代的次数N就越多
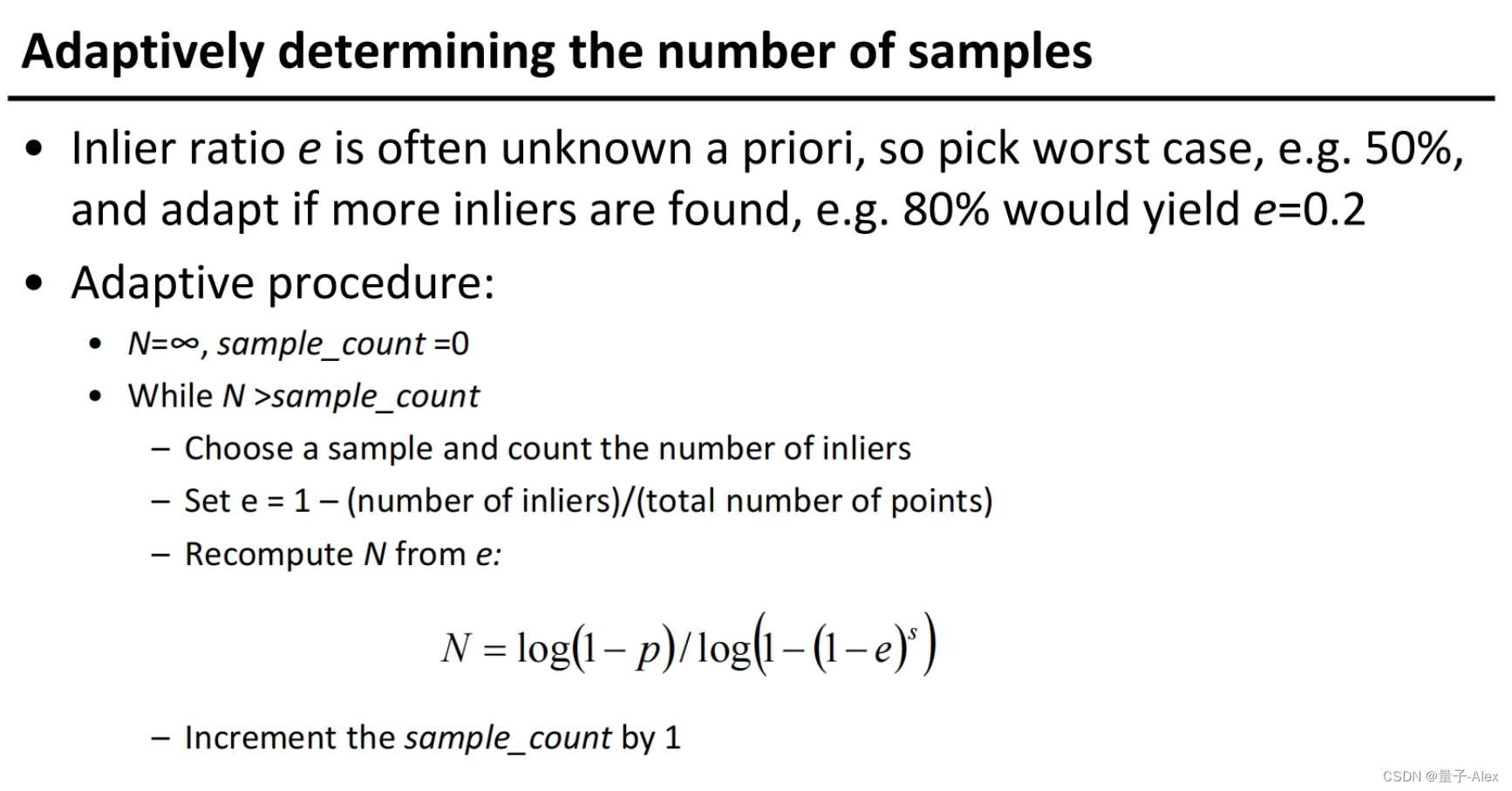
9 自适应方法
真实情况下很多时候不知道外点率e
10 RANSAC的应用实例

指纹对应
仿射矩阵有6个参数,需要3对点
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/从前慢现在也慢/article/detail/79107
推荐阅读
相关标签

