
热门标签
热门文章
- 1C# message简单实现窗口间信息接收与发送_c# wm_user 消息为空
- 2【数据结构】数据结构初识
- 3微信小程序授权登录三种实现方式
- 4微信小程序入门05-用户登录注册接口开发_微信小程序实现注册登录到数据库
- 5Python pywinauto+lackey实现自动安装软件_lackey python
- 6Docker容器的可视化管理工具—DockerUI本地部署与远程访问
- 7[翻译] Unity 开发自学路线_unity 学习路线
- 8关于“Python”的核心知识点整理大全45
- 9使用cdn提高Github Pages的访问速度_github cdn
- 10解决Microsoft Visual C++ 14.0 or greater is required. Get it with “Microsoft C++ Build Tools“_error: microsoft visual c++ 14.0 or greater is req
当前位置: article > 正文
octomap_server使用--生成二维占据栅格地图和三维概率地图
作者:从前慢现在也慢 | 2024-02-16 18:55:39
赞
踩
octomap_server
octomap_server是ROS中的一个基于octomap的功能包。我在查阅资料的时候,发现所有的介绍、博客等资料都是在介绍其将点云地图转化为基于Octree的OctoMap的功能。由于之前一直在查找三维点云地图转化为二维地图的方法,所以之前试过这个包的三维转换功能后就没有在继续使用,由于之前使用其他方法将二维占据栅格地图生成了,然后准备回过头来再看一下octomap_server的三维概率地图,然后在不经意间就发现了它也有转化为二维地图的功能。。。 。。。
首先简单介绍下octomap_server的安装。
- 打开一个终端.(ctrl+alt+T)输入下面指令安装octomap.
- sudo apt-get install ros-kinetic-octomap-ros #安装octomap
- sudo apt-get install ros-kinetic-octomap-msgs
- sudo apt-get install ros-kinetic-octomap-server
-
- 安装octomap 在 rviz 中的插件
- sudo apt-get install ros-kinetic-octomap-rviz-plugins
安装上这个插件以后你可以启动 rviz ,这时候点开Add选项,会多一个octomap_rviz_plugins模组.如下图所示:

其中的OccupancyGrid是显示三维概率地图,也就是octomap地图。OccupancyMap是显示二维占据栅格地图。
可以通过一个launch文件启动octomap_server节点,如下:
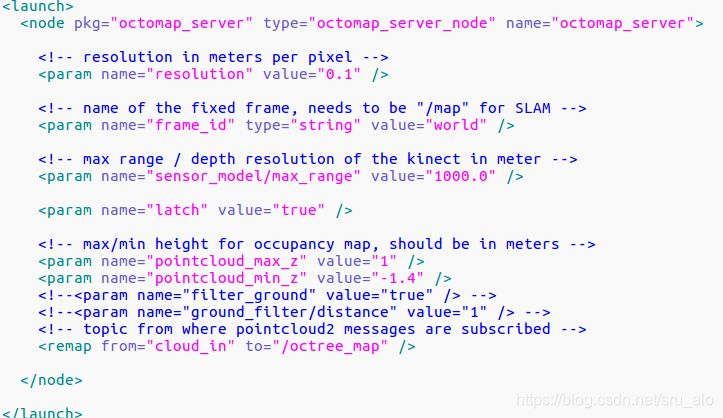
其中的param都是可以修改的,具体的修改细节见这里。/octotree_map修改为自己的PointCloud2点云即可。
运行此launch文件会有如下话题:
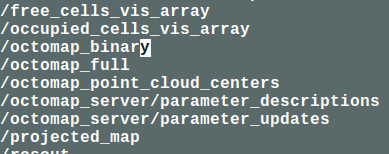
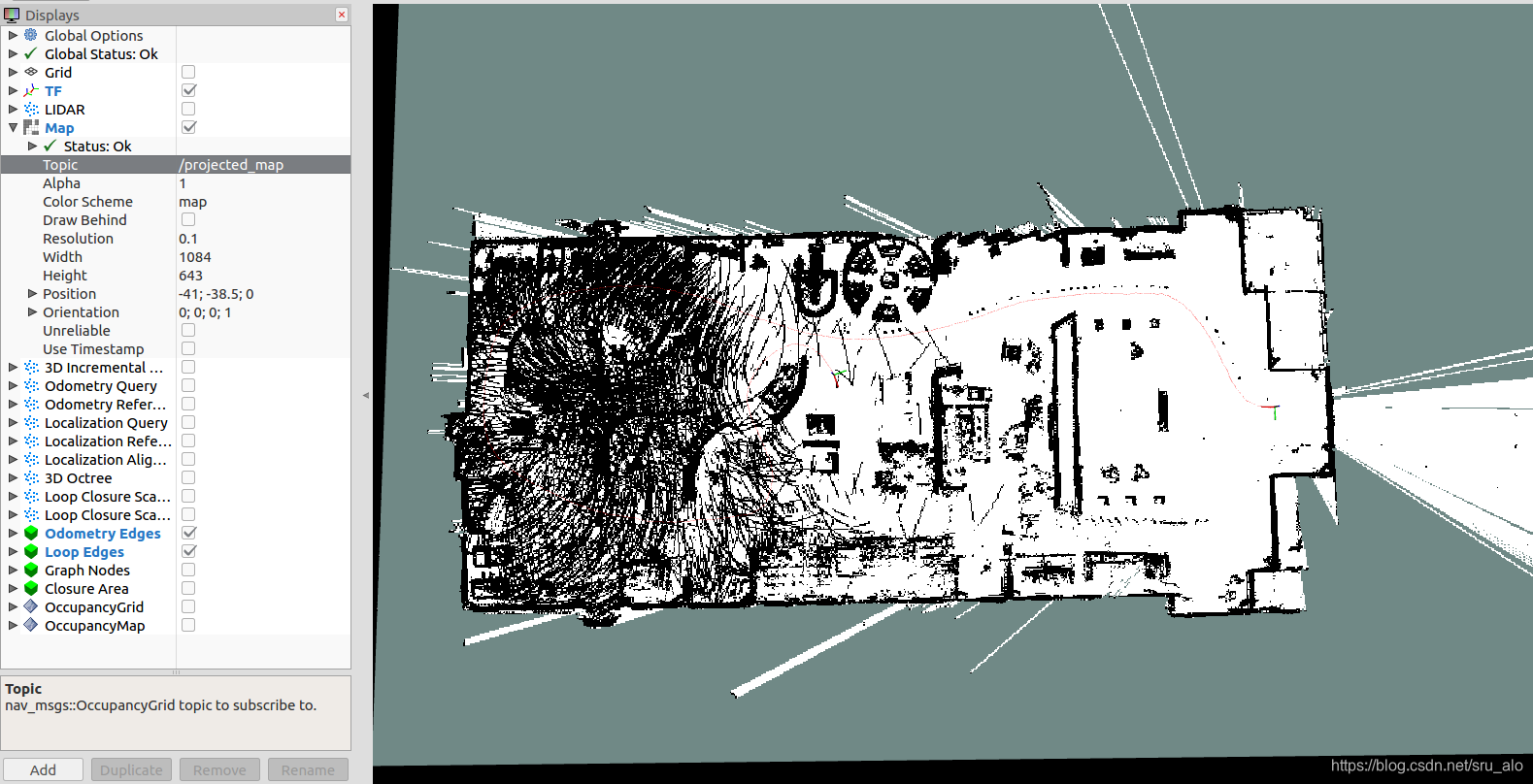
打开rviz,在里面添加OccupancyGrid,OccupancyMap,Map显示选项,显示话题选择octomap_full或者octomap_binary。
注意:param中的frame_id要和rviz的Fixed Frame一致。
Map:
OccupancyMap:

OccupancyGrid:

最后放一下北达科他大学( North Dakota State University)cloud_to_map学习代码:https://download.csdn.net/download/sru_alo/12277545
源文件github地址我找不到了
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/从前慢现在也慢/article/detail/96229
推荐阅读
相关标签

