
- 1【总结】nginx源码编译安装报错./configure: error: SSL modules require the OpenSSL library.
- 2Linux 安装Hadoop_linux安装hadoop
- 3Maven下载、安装和配置教程(2024年6月6日)
- 4Tensorflow、CUDA、cuDNN详细的下载安装过程_cudnn下载
- 5Linux环境下Hadoop3.2.0单机部署_hadoop3.2单机部署
- 6day15-硅谷课堂-直播对接和微信分享_zhibodun
- 7Python离线安装第三方库
- 8对角安装的双舵轮AGV运动学核心算法
- 9ansible模块+playbook
- 10oracle 把某用户下的表权限授权给另一用户_jbqd
STM32 串口IDLE接收空闲中断+DMA_串口空闲中断加dma接收
赞
踩
参考
http://t.csdnimg.cn/fAV38
https://www.bilibili.com/video/BV1Hv411J7NN/?spm_id_from=333.337.search-card.all.click&vd_source=3d89f344723155232808b7755f132952
1.基础知识
STM32 IDLE 接收空闲中断
功能:
在使用串口接受字符串时,可以使用空闲中断(IDLEIE置1,即可使能空闲中断),这样在接收完一个字符串,进入空闲状态时(IDLE置1)便会激发一个空闲中断。在中断处理函数,我们可以解析这个字符串。
接受完一帧数据,触发中断
STM32的IDLE的中断产生条件:
在串口无数据接收的情况下,不会产生,当清除IDLE标志位后,必须有接收到第一个数据后,才开始触发,一但接收的数据断流,没有接收到数据,即产生IDLE中断
STM32 RXNE接收数据中断
功能:
当串口接收到一个bit的数据时,(读取到一个停止位) 便会触发 RXNE接收数据中断
接受到一个字节的数据,触发中断。
比如给上位机给单片机一次性发送了8个字节,就会产生8次RXNE中断,1次IDLE中断。
串口CR1寄存器
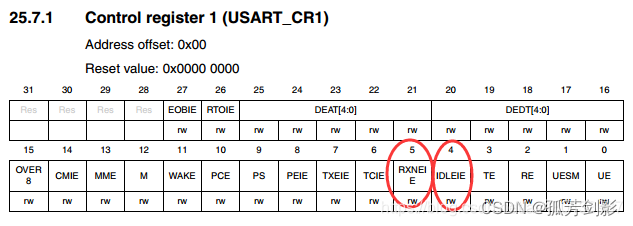
对bit4写1开启IDLE接受空闲中断
,对bit5写1开启RXNE接收数据中断。
串口ISR寄存器
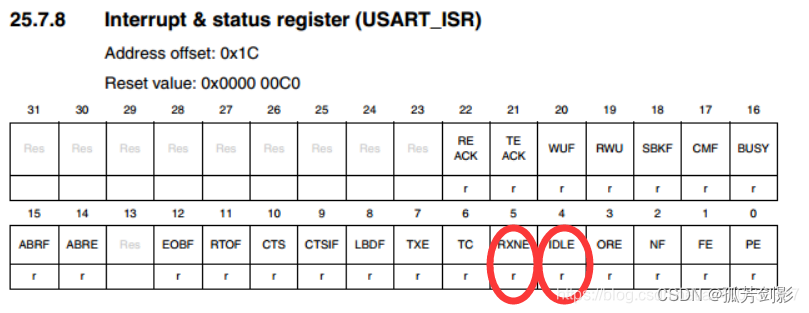
此寄存器为串口状态查询寄存器
当串口接收到数据时,bit5 RXNE就会自动变成1,当接收完一帧数据后,bit4就会变成1.
清除RXNE中断标志位的方法为:
只要把接收到的一个字节读出来,就会清除这个中断
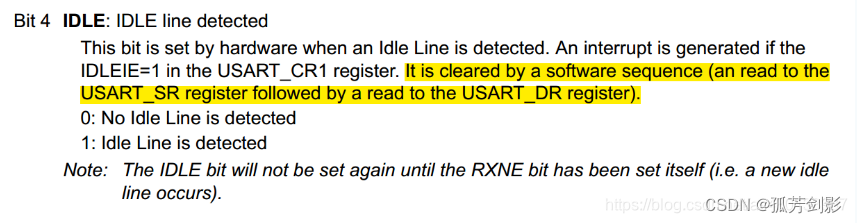
在STM32F1 /STM32F4 系列中 清除IDLE中断标志位的方法为:
先读SR寄存器,
再读DR寄存器。
memset()函数
extern void *memset(void *buffer, int c, int count)
- 1
buffer:为指针或是数组
c:是赋给buffer的值
count:是buffer的长度.
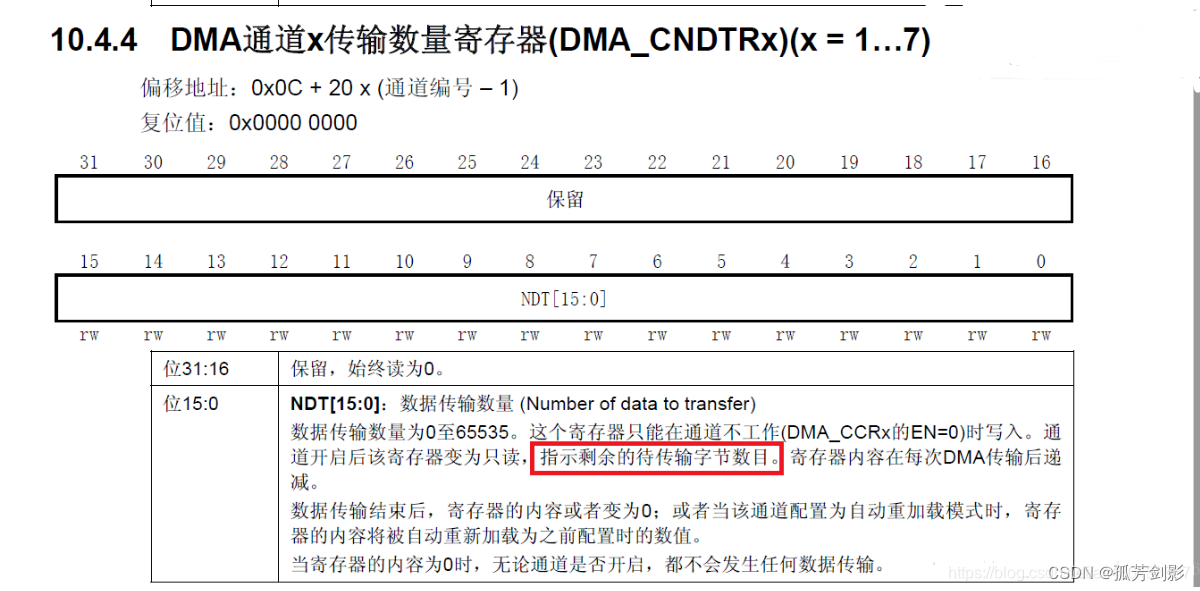
USART采用DMA接收时,如何读取当前接收字节数?
#define __HAL_DMA_GET_COUNTER(__HANDLE__) ((__HANDLE__)->Instance->CNDTR);
- 1
DMA接收时该宏将返回当前接收空间剩余字节
实际接受的字节= 预先定义的接收总字节 - __HAL_DMA_GET_COUNTER()
其本质就是读取NTDR寄存器,DMA通道结构体中定义了NDTR寄存器,读取该寄存器即可得到未传输的数据数呢,
2.IDLE 接收空闲中断+DMA
实现思路:采用STM32F103的串口1,并配置成空闲中断IDLE模式且使能DMA接收,并同时设置接收缓冲区和初始化DMA。那么初始化完成之后,当外部给单片机发送数据的时候,假设这次接受的数据长度是200个字节,那么在单片机接收到一个字节的时候并不会产生串口中断,而是DMA在后台把数据默默地搬运到你指定的缓冲区数组里面。当整帧数据发送完毕之后串口才会产生一次中断,此时可以利用__HAL_DMA_GET_COUNTER(&hdma_usart1_rx);函数计算出当前DMA接收存储空间剩余字节
本次的数据接受长度=预先定义的接收总字节-接收存储空间剩余字节
应用对象:适用于各种串口相关的通信协议,如:MODBUS,PPI ;还有类似于GPS数据接收解析,串口WIFI的数据接收等,都是很好的应用对象。
本例程功能:
使用DMA+串口接受空闲中断 实现将接收的数据完整发送到上位机的功能
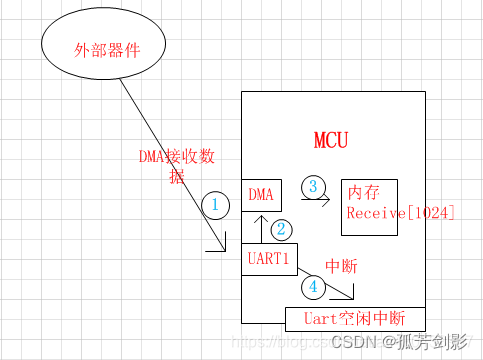
接收数据的流程:
首先在初始化的时候打开DMA接收,当MCU通过USART接收外部发来的数据时,在进行第①②③步的时候,DMA直接将接收到的数据写入缓存rx_buffer[100] //接收数据缓存数组,程序此时也不会进入接收中断,在软件上无需做任何事情,要在初始化配置的时候设置好配置就可以了。
数据接收完成的流程:
当数据接收完成之后产生接收空闲中断④
在中断服务函数中做这几件事:
判断是否为IDLE接受空闲中断
在中断服务函数中将接收完成标志位置1
关闭DMA防止在处理数据时候接收数据,产生干扰。
计算出接收缓存中的数据长度,清除中断位,
while循环 主程序流程:
主程序中检测到接收完成标志被置1
进入数据处理程序,现将接收完成标志位置0,
将接收到的数据重新发送到上位机
重新设置DMA下次要接收的数据字节数,使能DMA进入接收数据状态。
usart.c
#include "usart.h" /* USER CODE BEGIN 0 */ volatile uint8_t rx_len = 0; //接收一帧数据的长度 volatile uint8_t recv_end_flag = 0; //一帧数据接收完成标志 uint8_t rx_buffer[100]={0}; //接收数据缓存数组 /* USER CODE END 0 */ UART_HandleTypeDef huart1; DMA_HandleTypeDef hdma_usart1_rx; DMA_HandleTypeDef hdma_usart1_tx; /* USART1 init function */ void MX_USART1_UART_Init(void) { huart1.Instance = USART1; huart1.Init.BaudRate = 115200; huart1.Init.WordLength = UART_WORDLENGTH_8B; huart1.Init.StopBits = UART_STOPBITS_1; huart1.Init.Parity = UART_PARITY_NONE; huart1.Init.Mode = UART_MODE_TX_RX; huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE; huart1.Init.OverSampling = UART_OVERSAMPLING_16; if (HAL_UART_Init(&huart1) != HAL_OK) { Error_Handler(); } __HAL_UART_ENABLE_IT(&huart1, UART_IT_RXNE); //使能IDLE中断 __HAL_UART_ENABLE_IT(&huart1, UART_IT_IDLE); //使能IDLE中断 //DMA接收函数,此句一定要加,不加接收不到第一次传进来的实数据,是空的,且此时接收到的数据长度为缓存器的数据长度 HAL_UART_Receive_DMA(&huart1,rx_buffer,BUFFER_SIZE); } void HAL_UART_MspInit(UART_HandleTypeDef* uartHandle) { GPIO_InitTypeDef GPIO_InitStruct = {0}; if(uartHandle->Instance==USART1) { /* USER CODE BEGIN USART1_MspInit 0 */ /* USER CODE END USART1_MspInit 0 */ /* USART1 clock enable */ __HAL_RCC_USART1_CLK_ENABLE(); __HAL_RCC_GPIOA_CLK_ENABLE(); /**USART1 GPIO Configuration PA9 ------> USART1_TX PA10 ------> USART1_RX */ GPIO_InitStruct.Pin = GPIO_PIN_9; GPIO_InitStruct.Mode = GPIO_MODE_AF_PP; GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); GPIO_InitStruct.Pin = GPIO_PIN_10; GPIO_InitStruct.Mode = GPIO_MODE_INPUT; GPIO_InitStruct.Pull = GPIO_NOPULL; HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); /* USART1 DMA Init */ /* USART1_RX Init */ hdma_usart1_rx.Instance = DMA1_Channel5; hdma_usart1_rx.Init.Direction = DMA_PERIPH_TO_MEMORY; hdma_usart1_rx.Init.PeriphInc = DMA_PINC_DISABLE; hdma_usart1_rx.Init.MemInc = DMA_MINC_ENABLE; hdma_usart1_rx.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE; hdma_usart1_rx.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE; hdma_usart1_rx.Init.Mode = DMA_NORMAL; hdma_usart1_rx.Init.Priority = DMA_PRIORITY_MEDIUM; if (HAL_DMA_Init(&hdma_usart1_rx) != HAL_OK) { Error_Handler(); } __HAL_LINKDMA(uartHandle,hdmarx,hdma_usart1_rx); /* USART1_TX Init */ hdma_usart1_tx.Instance = DMA1_Channel4; hdma_usart1_tx.Init.Direction = DMA_MEMORY_TO_PERIPH; hdma_usart1_tx.Init.PeriphInc = DMA_PINC_DISABLE; hdma_usart1_tx.Init.MemInc = DMA_MINC_ENABLE; hdma_usart1_tx.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE; hdma_usart1_tx.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE; hdma_usart1_tx.Init.Mode = DMA_NORMAL; hdma_usart1_tx.Init.Priority = DMA_PRIORITY_MEDIUM; if (HAL_DMA_Init(&hdma_usart1_tx) != HAL_OK) { Error_Handler(); } __HAL_LINKDMA(uartHandle,hdmatx,hdma_usart1_tx); /* USART1 interrupt Init */ HAL_NVIC_SetPriority(USART1_IRQn, 0, 0); HAL_NVIC_EnableIRQ(USART1_IRQn); /* USER CODE BEGIN USART1_MspInit 1 */ /* USER CODE END USART1_MspInit 1 */ } } void HAL_UART_MspDeInit(UART_HandleTypeDef* uartHandle) { if(uartHandle->Instance==USART1) { /* USER CODE BEGIN USART1_MspDeInit 0 */ /* USER CODE END USART1_MspDeInit 0 */ /* Peripheral clock disable */ __HAL_RCC_USART1_CLK_DISABLE(); /**USART1 GPIO Configuration PA9 ------> USART1_TX PA10 ------> USART1_RX */ HAL_GPIO_DeInit(GPIOA, GPIO_PIN_9|GPIO_PIN_10); /* USART1 DMA DeInit */ HAL_DMA_DeInit(uartHandle->hdmarx); HAL_DMA_DeInit(uartHandle->hdmatx); /* USART1 interrupt Deinit */ HAL_NVIC_DisableIRQ(USART1_IRQn); /* USER CODE BEGIN USART1_MspDeInit 1 */ /* USER CODE END USART1_MspDeInit 1 */ } }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
usart.h
#ifndef __usart_H #define __usart_H #ifdef __cplusplus extern "C" { #endif /* Includes ------------------------------------------------------------------*/ #include "main.h" /* USER CODE BEGIN Includes */ /* USER CODE END Includes */ extern UART_HandleTypeDef huart1; extern DMA_HandleTypeDef hdma_usart1_rx; extern DMA_HandleTypeDef hdma_usart1_tx; /* USER CODE BEGIN Private defines */ #define BUFFER_SIZE 100 extern volatile uint8_t rx_len ; //接收一帧数据的长度 extern volatile uint8_t recv_end_flag; //一帧数据接收完成标志 extern uint8_t rx_buffer[100]; //接收数据缓存数组 /* USER CODE END Private defines */ void MX_USART1_UART_Init(void); /* USER CODE BEGIN Prototypes */ /* USER CODE END Prototypes */ #ifdef __cplusplus } #endif #endif /*__ usart_H */
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
main.c
/* ********************************************************************************************************* * 函 数 名: DMA_Usart_Send * 功能说明: 串口发送功能函数 * 形 参: buf,len * 返 回 值: 无 ********************************************************************************************************* */ void DMA_Usart_Send(uint8_t *buf,uint8_t len)//串口发送封装 { if(HAL_UART_Transmit_DMA(&huart1, buf,len)!= HAL_OK) //判断是否发送正常,如果出现异常则进入异常中断函数 { Error_Handler(); } } /* ********************************************************************************************************* * 函 数 名: DMA_Usart1_Read * 功能说明: 串口接收功能函数 * 形 参: Data,len * 返 回 值: 无 ********************************************************************************************************* */ void DMA_Usart1_Read(uint8_t *Data,uint8_t len)//串口接收封装 { HAL_UART_Receive_DMA(&huart1,Data,len);//重新打开DMA接收 }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
while循环
while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ if(recv_end_flag == 1) //接收完成标志 { DMA_Usart_Send(rx_buffer, rx_len); rx_len = 0;//清除计数 recv_end_flag = 0;//清除接收结束标志位 // for(uint8_t i=0;i<rx_len;i++) // { // rx_buffer[i]=0;//清接收缓存 // } memset(rx_buffer,0,rx_len); } HAL_UART_Receive_DMA(&huart1,rx_buffer,BUFFER_SIZE);//重新打开DMA接收 }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
代码下载
https://gitcode.com/ZXiaoxuan/STM32-DMA-IDLE-/overview?utm_source=csdn_github_accelerator&isLogin=1
3. IDLE 接收空闲中断+RXNE接收数据中断
UART中断使能函数
__HAL_UART_ENABLE_IT(__HANDLE__, __INTERRUPT__)
- 1
功能: 该函数的作用是使能对应的UART中断
我们现在所用到的为:
* @arg UART_IT_RXNE: Receive Data register not empty interrupt
* @arg UART_IT_IDLE: Idle line detection interrupt
- 1
- 2
RXNE接收数据中断
IDLE 接收空闲中断
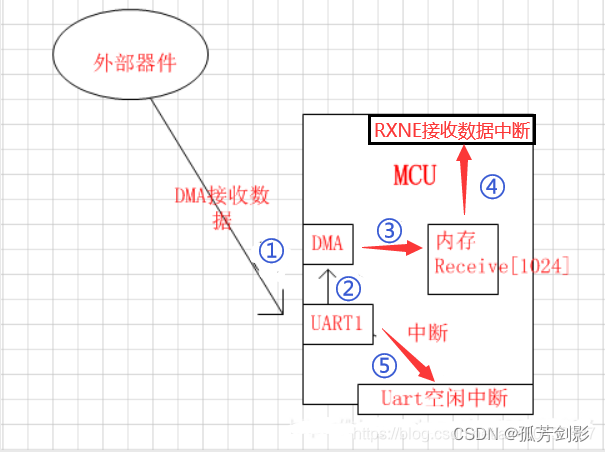
本例程功能:
使用RXNE接收数据中断+IDLE串口接受空闲中断 实现将接收的数据完整发送到上位机的功能
接收数据的流程:
首先在初始化的时候打开DMA接收,当MCU通过USART接收外部发来的数据时,在进行第①②③步的时候,DMA直接将接收到的数据写入缓存rx_buffer[100] //接收数据缓存数组,同样初始化配置的时候设置好配置就可以了。
接收到一个字节数据:
接收到一个字节的数据之后,便会进入RXNE接收数据中断,
接受完一帧数据之后,便会进入IDLE 接收空闲中断
usart.c
void MX_USART1_UART_Init(void) { huart1.Instance = USART1; huart1.Init.BaudRate = 115200; huart1.Init.WordLength = UART_WORDLENGTH_8B; huart1.Init.StopBits = UART_STOPBITS_1; huart1.Init.Parity = UART_PARITY_NONE; huart1.Init.Mode = UART_MODE_TX_RX; huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE; huart1.Init.OverSampling = UART_OVERSAMPLING_16; if (HAL_UART_Init(&huart1) != HAL_OK) { Error_Handler(); } __HAL_UART_ENABLE_IT(&huart1, UART_IT_RXNE); //使能IDLE中断 __HAL_UART_ENABLE_IT(&huart1, UART_IT_IDLE); //使能IDLE中断 //DMA接收函数,此句一定要加,不加接收不到第一次传进来的实数据,是空的,且此时接收到的数据长度为缓存器的数据长度 HAL_UART_Receive_DMA(&huart1,rx_buffer,BUFFER_SIZE); }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24


