
- 1FlowUs科研工作者的第二大脑|论文整理与知识库构建的终极解决方案|FlowUs不愧是论文神器PDF智能分析高效科研必备|学术写作团队协作学术资源整合科研效率提升选FlowUs
- 2ACC-UNet——基于Transformers与UNet的语义分割模型_unet transformer
- 32023年银行校招上岸全攻略分享(附历年商业银行笔试真题和备_银行校招笔试真题
- 4各大人工智能顶会近三年的paper网址_aaai digital library
- 5爬虫实战5:爬取百度图片_爬虫实现可视化爬取百度图片案例
- 6最近面了12个人,发现这个测试基础题都答不上来..._请用 python 打印出 10000 以内的对称数(对称数特点:数字左右对称,如:1,2,11,
- 7互联网行业采购堡垒机的四个必要性看这里!
- 8爬取百度图片_百度图片爬取
- 9spring boot druid spring监控_spring-boot-maven-plugin not found
- 10python3.5+selenium3.4自动化测试6_selenium的Webdriver-API整理(上)_from seleniumn import webdriver 3.4版本
【图像检测】基于高斯过程和Radon变换实现血管跟踪和直径估计附matlab代码_血管宽度计算 python
赞
踩
1 简介
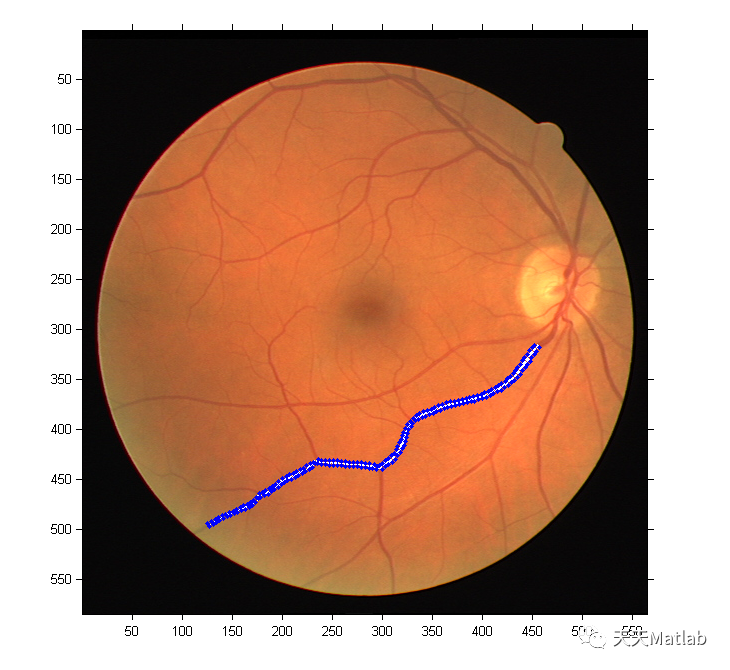
. Extraction of blood vessels in retinal images is an important step for computer-aided diagnosis of ophthalmic pathologies. We propose an approach for blood vessel tracking and diameter estimation. We hypothesize that the curvature and the diameter of blood vessels are Gaussian processes (GPs). Local Radon transform, which is robust against noise, is subsequently used to compute the features and train the GPs. By learning the kernelized covariance matrix from training data, vessel direction and its diameter are estimated. In order to detect bifurcations, multiple GPs are used and the difference between their corresponding predicted directions is quantified. The combination of Radon features and GP results in a good performance in the presence of noise.
The proposed method successfully deals with typically difficult cases such as bifurcations and central arterial reflex, and also tracks thin vessels with high accuracy. Experiments are conducted on the publicly available DRIVE, STARE, CHASEDB1, and high-resolution fundus databases evaluating sensitivity, specificity, and Matthew’s correlation coefficient (MCC). Experimental results on these datasets show that the proposed method reaches an average sensitivity of 75.67%, specificity of 97.46%, and MCC of 72.18% which is comparable to the
state-of-the-art.
2 部分代码
function [output] = GP_input_dir(input_image, seed_point_position, vessel_radius,previous_direction)% extract data from image for vessel tracking using radon transform zoom = 4; [a b] = size(input_image); [X,Y] = meshgrid(1:b,1:a); i=1; [grid_xx,grid_yy] = meshgrid(seed_point_position(1)-vessel_radius(i):1/zoom:seed_point_position(1)+vessel_radius(i) , ... seed_point_position(2)-vessel_radius(i):1/zoom:seed_point_position(2)+vessel_radius(i)); square_mask = uint8(interp2(X,Y,input_image,grid_xx,grid_yy,'cubic')); square_mask = double(square_mask); min_mask = min(square_mask(:))/255; max_mask = max(square_mask(:))/255; square_mask = double(imadjust(uint8(square_mask),[min_mask max_mask], [0 1])); Mask_Size = size(square_mask); Mask_center = (Mask_Size(1)+1)/2; [yy,xx] = ndgrid( (1:Mask_Size(1)),(1:Mask_Size(2))); circle_mask= double((xx-Mask_center).^2+(yy-Mask_center).^2 <= (zoom*vessel_radius(i))^2); image_circle_mask = square_mask.*circle_mask; sigma_2= -Mask_center^2/log(.15); [x,y] = meshgrid(-Mask_center+1:1:Mask_center-1); z= exp(-((x).^2)/sigma_2 - ((y).^2)/sigma_2); circle_mask_gaussian= z.*image_circle_mask; rotated_circle_mask = imrotate(circle_mask_gaussian,-previous_direction); [a b]= size(rotated_circle_mask); seed_point_center = (a+1)/2; mask_radius = seed_point_center - 1; [XX,YY] = meshgrid(-mask_radius:mask_radius); integral_radius = [0: mask_radius/100:mask_radius]; theta_int = [89:-1:-89]; grid_x(theta_int+90,:) = cosd(theta_int)'*integral_radius; grid_y(theta_int+90,:) = sind(theta_int)'*integral_radius; ZI = interp2(XX,YY,rotated_circle_mask,grid_x,grid_y,'cubic'); integral_179 = sum(ZI'); integral_179 = integral_179 - min(integral_179); integral_179_normal = integral_179/max(integral_179); output((i-1)*179+1:i*179) = integral_179(179:-1:1)/max(integral_179);end3 仿真结果
4 参考文献
[1]马歌. 基于Canny算子和Radon变换的证件图像倾斜校正[J]. 中国新技术新产品, 2014(15):2.
博主简介:擅长智能优化算法、神经网络预测、信号处理、元胞自动机、图像处理、路径规划、无人机等多种领域的Matlab仿真,相关matlab代码问题可私信交流。
部分理论引用网络文献,若有侵权联系博主删除。


