
- 1Ubuntu服务器更改远程端口号的方法_ubuntu网络port怎么设置
- 2CloudFlare域名管理系统_cloudflare批量管理
- 3php论坛源代码,php论坛源代码下载
- 4AutoCompress: An Automatic DNN Structured Pruning Framework for Ultra-High Compression Rates
- 5Strongswan与Andriod野蛮模式L2TPoverIPsec对接有时候不成功。_strongswan ipsec不生效
- 6算法32:环形链表(有双指针)_求环形链表的节点数java
- 7idea2018项目导入2020.1idea依赖包失败的解决方法_getloadedimportedassetsandartifactids called with
- 8Python爬虫:代理ip电商数据实战
- 9聚类分析之 K均值_k均值聚类适用于什么样的数据
- 10python uiautomator2 安装及使用_python uiautomatic2 使用方法
智驾系统开发中被高频问到的一些面试问题,这份文档能帮到你
赞
踩
作者 | 山丘
出品 | 焉知
1、单目视觉感知也能实现双目视觉感知一样的深度信息检测吗?
单目视觉感知通常指的是通过单个摄像头或传感器获取的视觉信息。尽管它在获取深度信息方面可能不如双目或多目视觉系统那么直接,但是通过一些技术和算法,可以尝试实现类似的深度信息检测。
一种常见的方法是利用单目视觉的图像信息和计算机视觉技术,例如结构光、纹理、运动等方面的特征,结合机器学习或深度学习算法,通过训练模型来估计物体的深度信息。这种方法被称为单目深度估计或单目视觉深度估计。通过对大量已知深度的图像进行训练,模型可以学习到图像中的不同区域与实际深度之间的关系,从而在未知场景中推断深度。
虽然这种方法可能不如双目或多目系统那样精确,但在许多应用场景中已经证明是有效的,例如智能手机的虚化背景功能、自动驾驶车辆中的障碍物检测等。随着技术的不断进步,单目视觉深度估计的准确性和稳定性也在不断提高。
2、除了深度信息外,单目视觉感知对场景物体的高程信息识别呢?
单目视觉感知通常难以直接获取场景物体的高程信息,因为单个摄像头只能提供二维图像信息,缺乏深度感知。高程信息通常指的是物体在垂直方向上的位置或高度。
尽管如此,通过一些技术和算法,单目视觉系统仍然可以间接地推断物体的高程信息。其中一种常见的方法是利用单目视觉中的透视变换和物体的大小、形状等特征来估计物体的相对高度。例如,在图像中较远处的物体通常会显得较小,而较近处的物体则会显得较大,通过这种尺度感知,可以大致推断物体的相对高程。
当然,推理物体的高程信息通常需要建立在一些先验知识或真值系统的基础上。例如,通过观察大量场景中物体的大小、形状以及它们在图像中的位置关系,可以建立一些规则或模型来推断物体的相对高度。
这种推理过程可能会受到一些因素的影响,例如摄像头的位置和朝向、场景的光照条件、物体之间的遮挡等。因此,在实际应用中,需要进行大量的数据收集和分析,并结合机器学习或深度学习等技术来训练模型,以提高对高程信息的推断准确性和稳定性。
3、如果结合激光、IMU等传感器是否可以大幅提升单目视觉对高程信息和深度信息的检测呢?
除了以上纯单目视觉感知识别外,还可以结合其他传感器或信息源来提高对高程信息的识别。例如,利用惯性测量单元(IMU)来获取相机的姿态信息,从而更准确地估计物体的高度。另外,可以使用激光雷达(LiDAR)等传感器来获取更精确的三维信息,然后将其与单目视觉的图像信息进行融合,以获得更准确的高程信息。
首先,激光雷达(LiDAR):可以提供精确的三维空间信息,通过测量物体到传感器的距离,可以得到物体的高程信息。将LiDAR获取的三维点云数据与单目视觉的图像信息进行融合,可以提高对物体高程信息的识别准确性。例如,可以通过匹配图像中的特征点和LiDAR点云中的特征点,来确定物体在三维空间中的位置和高度。
其次惯性测量单元(IMU)可以提供传感器在空间中的姿态信息,包括加速度和角速度等。结合单目视觉的图像信息和IMU提供的姿态信息,可以更准确地估计摄像头的位置和方向,从而改善对物体高程信息的推断。
通过对摄像头的姿态进行跟踪和校正,可以更精确地将图像中的物体位置映射到三维空间中,从而提高对高程信息的检测准确性。
综上所述,激光雷达和IMU等传感器提供的额外信息可以帮助改善单目视觉感知系统对高程信息的检测能力,使其在三维场景中更准确地推断物体的位置和高度。
总的来说,单目视觉感知在获取物体的高程信息方面可能会受到一些限制,但通过结合其他传感器、算法和技术,可以在一定程度上实现对物体高程信息的识别。
4、BEV感知2D转3D的具体原理是什么?

通过车辆采集多种传感器,包括摄像头、激光雷达(LiDAR)、雷达等数据进行数据预处理。该阶段需要对摄像头图像进行校准和去畸变,确保准确的几何信息。对LiDAR和雷达数据进行滤波和去噪,以减少不必要的干扰和误差。随后进行传感器数据融合,将来自不同传感器的数据进行融合,形成一个综合的环境模型。通常使用的方法包括传统的传感器融合技术,如卡尔曼滤波器或扩展卡尔曼滤波器,以及基于深度学习的数据融合方法。
之后,便是使用摄像头图像进行几何建模,例如利用单应性矩阵进行相机定位和场景重建。对2D图像中的物体进行特征提取和跟踪,从而推断其在3D空间中的位置和形状。期间,需要进行必要的运动估计。分析相邻帧之间的运动信息,例如使用光流法或视觉惯性里程计(VO)。通过对物体的运动轨迹进行建模,推断它们的速度和加速度。在深度学习应用阶段,使用深度学习模型对传感器数据进行端到端的学习。这期间可以基于深度卷积神经网络(CNN)的方法,如利用卷积神经网络对点云进行处理,或使用CNN进行图像语义分割等。也可以利用地图辅助的方法,将实时获取的环境数据与预先生成的地图进行对比和匹配。这种利用地图中的信息,例如道路几何、交通标志等,可以很好的提高感知的准确性和鲁棒性。
最后,是生成综合感知结果。将来自不同步骤的结果进行综合,得到一个全面的3D环境模型。这个模型包括车辆周围的障碍物、道路结构、交通标志等信息,为车辆的自主导航和驾驶决策提供支持。
通过以上步骤,车辆可以将来自传感器的2D数据转换成更加丰富和准确的3D环境鸟瞰信息,从而实现对周围环境的感知和理解。
5、BEV Fusion算法把3D Lidar数据用View transformer变成2D,是不是会更省算力,那么Lidar距离信息会丢失么?
View Transformer是一种将3D点云数据映射到2D平面的技术,它可以将3D数据投影到特定的平面或视角上,例如将3D点云投影到车辆周围的鸟瞰图像中。这种转换可以大大简化数据处理和分析的复杂性,因为2D数据的处理通常比3D数据更加高效。
BEV Fusion算法是完全可以将3D LiDAR数据转换为2D的View Transformer,的确可以在一定程度上降低计算成本和算力,但这种转换过程可能会造成一些信息丢失。
然而,通过View Transformer将3D LiDAR数据转换为2D时,确实会丢失一些信息,其中包括了距离信息。在2D投影中,LiDAR数据通常只包含了物体在水平方向上的位置信息,而垂直方向上的距离信息则会丢失。这可能会影响对于物体的精确距离测量和深度感知,特别是对于远处的物体或者垂直方向上的高度变化较大的物体。
虽然这种转换会丢失一些信息,但在某些场景下,例如在车辆周围的鸟瞰视角中进行障碍物检测和路径规划时,对距离信息的要求可能相对较低。因此,通过View Transformer将3D LiDAR数据转换为2D可以提供一种更高效的方式来处理和分析LiDAR数据,尤其是在有限的计算资源下。但在某些应用场景中,仍然可能需要保留完整的3D信息,以确保对于距离和深度的准确感知。
6、LSS的lift环节,将深度分布特征和图像特征做外积之后,得到的结果为什么叫视锥特征?
在LSS(Lidar and Semantic Segmentation)中的"Lift"环节,涉及到将深度分布特征和图像特征进行外积操作。这个外积操作得到的结果被称为"视锥特征",其名称来源于这个特征的形式和其所表示的信息。
外积操作:在LSS中,"Lift"环节的关键步骤是将来自深度信息(例如LiDAR)的特征与来自图像信息的特征进行外积操作。外积操作将两个特征的每个元素两两相乘,从而产生一个新的特征表示。在这里,深度分布特征和图像特征之间的外积可以用来捕捉它们之间的相关性和交互信息。
视锥特征的命名:"视锥特征"这个名称的来源可以解释为以下两点:
视锥的形状:深度信息通常表示了物体在三维空间中的位置和距离分布,而图像信息则提供了物体在二维图像平面上的外观特征。将这两种信息进行外积操作,可以看作是将深度信息沿着视角(视锥)与图像信息进行融合,从而产生了一种新的特征表示。
视锥特征的含义:由于该特征是通过深度和图像信息之间的外积得到的,因此它可以被视为是深度信息在视锥方向上的投影与图像信息的结合。这种特征既包含了来自深度信息的位置和距离分布的信息,又包含了来自图像信息的物体外观特征,因此被称为"视锥特征"。
综上所述,"视锥特征"这个名称既强调了深度信息和图像信息之间的融合,又突出了这种融合所产生的新特征对于捕捉物体在视野范围内的位置、距离和外观等信息的重要性。
7、BEVFormer是怎么建模高度信息的?
BEVFormer是一种基于Bird's Eye View(BEV,鸟瞰视角)的深度学习模型,用于处理3D场景感知任务,如障碍物检测和目标跟踪。在处理3D场景时,BEVFormer通过设计特定的网络结构来建模高度信息。以下是BEVFormer建模高度信息的一般方法:

输入表示:BEVFormer通常接受的输入是来自3D传感器(如激光雷达或深度相机)的点云数据。这些点云数据包含了关于场景中物体的位置信息,通常以(x, y, z)的形式表示,其中(x, y)表示在地平面上的位置,z表示物体的高度。
BEV表示:BEVFormer首先将输入的3D点云数据转换为Bird's Eye View(BEV)表示。这意味着将3D点云投影到一个平面上,通常是一个水平平面,以便更容易地处理和分析。在BEV表示中,每个点都被映射到平面上的一个像素位置,并且可以保留其高度信息。
高度编码:在BEVFormer中,高度信息通常通过一种编码方式进行处理,以便于神经网络模型的学习。常见的高度编码方法包括将高度值离散化为多个区间,并将每个区间映射到一个独热编码向量。这样做的目的是让模型能够更好地理解和利用高度信息。
网络设计:BEVFormer的网络结构通常会考虑到高度信息。这可能包括在网络中添加专门的高度信息通道,或者设计能够有效利用高度信息的网络层或模块。例如,可以使用卷积层或注意力机制来处理高度信息,并将其融合到网络的其他部分中。
损失函数:在训练BEVFormer时,通常会定义一种损失函数来衡量模型的性能。这个损失函数通常会考虑到高度信息,以确保模型能够有效地利用这些信息来进行任务,如障碍物检测或目标跟踪。
通过以上几个步骤,BEVFormer可以很好地建模高度信息,并将其有效地融入到3D场景感知任务中,从而提高模型对于场景的理解和处理能力。
8、为什么要进行BEV轻量化?轻量化的BEV算法有哪些?如何部署落地?
在智能驾驶中,对BEV(Bird's Eye View,鸟瞰视角)进行轻量化处理有几个重要原因。首先是实时性要求。因为智能驾驶系统需要在实时性要求下对车辆周围环境进行准确的感知和分析。由于BEV提供了全景视角,因此可能需要处理大量的图像数据。通过轻量化处理,可以加快对BEV图像的处理速度,使系统能够更快地做出反应。其次是减少计算资源需求。BEV图像的处理可能需要大量的计算资源,包括CPU和GPU等。对BEV进行轻量化处理可以减少对计算资源的需求,使系统能够在有限的资源下更高效地运行。同时,轻量化BEV还可以有效降低功耗。由于处理大量图像数据会消耗大量的能量,这对于纯电动汽车来说尤为重要,因为能源的使用直接影响续航里程。通过轻量化处理BEV图像,可以降低系统的功耗,延长车辆的续航里程。此外,轻量化BEV处理还能够提高系统稳定性。由于轻量化处理可以降低系统的负荷,减少因处理大量数据而导致的系统崩溃或延迟。这有助于提高系统的稳定性和可靠性,确保智能驾驶系统能够在各种复杂的驾驶场景下正常运行。
在轻量化的BEV(Bird's Eye View,鸟瞰视角)算法方面,主要的目标是减少计算和内存资源的消耗,同时尽可能地保持良好的性能。以下是一些常见的轻量化BEV算法及其部署落地方式:
PointPillars:
PointPillars是一种轻量级的LiDAR数据处理算法,它通过将3D点云数据投影到BEV平面,并使用二维卷积神经网络(CNN)来进行物体检测。
部署落地时,可以将PointPillars算法部署在嵌入式系统或边缘计算设备上,如NVIDIA Jetson系列等,以实现实时的障碍物检测和感知任务。
PV-RCNN(Point-Voxel CNN):
PV-RCNN是一种结合了PointNet和二维卷积的轻量级3D物体检测算法,它使用体素化(Voxelization)技术将点云数据转换为3D体素网格,然后在BEV平面上进行处理。
部署落地时,可以利用GPU加速的嵌入式系统或专用的边缘计算设备来实现PV-RCNN的实时推断。
SparseBEVNet:
SparseBEVNet是一种基于稀疏表示的轻量级BEV算法,它通过对点云数据进行稀疏采样和投影,然后使用轻量级神经网络来进行目标检测和分割。
部署落地时,可以将SparseBEVNet算法部署在低功耗的智驾系统域控上,以实现对于稀疏点云数据的高效处理和推断。
MobileNetV3-SSD:
MobileNetV3-SSD是一种轻量级的图像物体检测算法,它采用了MobileNetV3作为骨干网络,并结合了SSD(Single Shot MultiBox Detector)的目标检测架构。部署落地时,可以将MobileNetV3-SSD算法部署在低成本的嵌入式设备或智能摄像头上,以实现实时的图像物体检测。
轻量级深度学习模型压缩技术:
除了轻量级算法外,还可以利用深度学习模型压缩技术来减小模型的尺寸和计算量,例如模型剪枝、量化、蒸馏等方法,从而实现轻量级BEV算法的部署和落地。
在部署这些轻量级BEV算法时,需要考虑目标设备的计算资源和存储资源,选择合适的算法和模型结构,并进行优化和部署,以实现实时性能和有效性的平衡。
9、CUDA核函数用法是咋样的?
CUDA核函数(Kernel Function)是在GPU上并行执行的函数,通常用于处理大规模数据并利用GPU的并行计算能力。CUDA核函数的一般用法是这样的:
定义核函数。在CUDA程序中,使用__global__修饰符来声明一个核函数。核函数的定义类似于C函数,但是可以在GPU上并行执行。
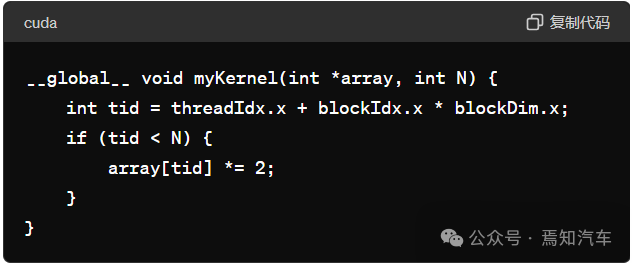
启动核函数:在主机代码中,需要使用特定的语法来启动CUDA核函数,并指定执行的线程和块的数量。<<<numBlocks, blockSize>>>语法用于启动核函数,其中numBlocks表示块的数量,blockSize表示每个块中线程的数量。
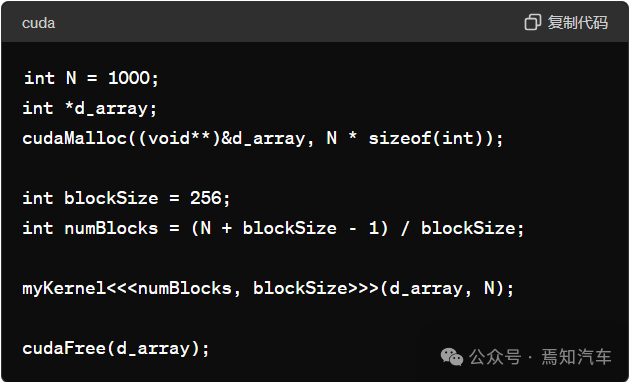
注意,CUDA核函数的执行是异步的,主机代码会继续执行,而不会等待核函数执行完毕。必要时可以使用cudaDeviceSynchronize()来等待核函数执行完成。
线程和块索引。在核函数内部可以使用内置变量来获取当前线程和块的索引,以便进行并行计算。
threadIdx.x:获取当前线程在其块中的索引。
blockIdx.x:获取当前块在网格中的索引。
内存管理:在核函数内部可以访问GPU上的全局内存,并进行读写操作。通常需要使用CUDA的内存分配和释放函数来分配和释放内存。
cudaMalloc():在GPU上分配内存。
cudaMemcpy():在主机和设备之间进行内存拷贝。
cudaFree():释放GPU上的内存。
通过以上步骤,可以在CUDA程序中定义和启动核函数,并利用GPU的并行计算能力进行高效的数据处理。
10、jetson系列,一般都是共享内存的,是否必须使用CudaMemcpy函数,还有其他的memcpy方式吗?
对于NVIDIA Jetson系列等具有共享内存的GPU设备,通常也可以使用其他的内存拷贝方式来进行数据传输,而不仅限于使用cudaMemcpy函数。以下是一些在Jetson系列或其他共享内存GPU上常用的内存拷贝方式:
Zero-Copy Memory:
Zero-Copy Memory是一种特殊的内存管理技术,它允许CPU和GPU共享相同的内存空间,从而避免了数据在主机和设备之间的显式拷贝。在Zero-Copy Memory中,主机上的内存可以直接映射到GPU的虚拟地址空间中,从而可以直接在GPU上访问主机内存中的数据。
使用Zero-Copy Memory可以避免显式的内存拷贝操作,但需要注意内存访问的性能和一致性问题。
Unified Memory:
Unified Memory是一种由CUDA引入的内存抽象层,它将主机内存和设备内存统一管理,使得程序可以像访问主机内存一样访问设备内存。使用Unified Memory,程序可以自动地在主机和设备之间进行内存迁移,无需显式地调用内存拷贝函数。Unified Memory适用于需要动态管理内存并且主机和设备之间频繁交换数据的场景。
CUDA Streams:
CUDA Streams是一种异步执行CUDA操作的机制,可以用来并行地进行内存拷贝和计算操作。使用CUDA Streams,可以将内存拷贝和计算任务放置在不同的流中,并行执行,从而提高数据传输和计算的效率。通过CUDA Streams,可以更灵活地控制数据传输和计算的执行顺序,以最大程度地利用GPU的并行计算能力。
尽管可以使用上述其他方式来进行内存拷贝,但cudaMemcpy函数仍然是最常用和最灵活的方式之一,特别是在需要精确控制内存传输和显式同步的情况下。选择合适的内存拷贝方式取决于具体的应用场景和性能要求。
11、神经网络中吞吐和延迟的关系是什么?如何权衡以上吞吐和延迟,以便做到效能最大化呢?
神经网络中吞吐和延迟之间存在密切关系,它们通常被用来描述网络性能和效率。这两个指标在设计和评估神经网络系统时都非常重要。这两个指标之间的关系可以简单描述为:通常情况下,提高吞吐会导致增加延迟,而降低延迟可能会降低吞吐。这是因为在追求更高吞吐时,系统可能会采取并行处理或批处理等方法来提高处理效率,但这可能会增加处理的延迟。相反,降低延迟可能需要减少处理批次的大小或增加系统资源,这可能会降低吞吐量。
要权衡吞吐和延迟以实现效能最大化,首先要明确系统的性能目标。是更关注快速的响应时间(低延迟),还是更关注每秒处理的数据量(高吞吐)?不同的应用可能会有不同的优先级。其次,还应从系统优化、批处理和并行处理、动态调整、性能监控和调优、使用专业工具和技术几下几方面进行入手。系统优化主要是通过优化算法、硬件设备和系统架构来提高吞吐和降低延迟。这可能包括选择高效的神经网络模型、合理分配硬件资源、采用并行处理、使用高性能的硬件设备等。动态调整过程主要是利用批处理和并行处理来提高吞吐,同时尽量减少延迟。通过合理设置批处理大小和并行处理的程度,可以在一定程度上平衡吞吐和延迟。性能监控和调优过程会根据系统负载和实时需求,动态调整系统参数和配置。例如,根据实时流量调整处理的并行度或批处理大小,以适应不同的工作负载。当然,利用性能分析工具和技术来识别瓶颈并进行优化。定期监控系统的性能指标,如吞吐量、延迟和资源利用率,并根据监控结果进行调优。持续的性能调优可以帮助系统保持在效能最大化的状态。
通过综合考虑以上策略,并根据具体应用场景和需求进行调整,可以实现吞吐和延迟之间的最佳权衡,从而达到效能最大化的目标。
欢迎扫下面二维码加入智能交通技术群!

点击文后阅读原文,可获得下载资料的方法。
联系方式:微信号18515441838

