
- 1操作系统进程实验课程设计_试编制一个程序段, 完成下图所示流程图的功能。
- 2python中npy转txt文件(科学计数法/十进制类型)_npy文件
- 3详解进程虚拟地址空间区域划分_进程地址空间怎么识别地址是什么区的
- 4DNS学习总结_dns服务器配置实验心得
- 5Multi-Video Temporal Synchronization论文笔记_multi-camera spatio-temporal synchronization
- 6MYSQL每日一用:SELECT 语句中比对(between and \ like \ left)
- 7es6标准下ajax类封装及使用_使用es6class封装ajax类
- 8【jellyfin】解决使用自定义域名和免费ssl证书安卓端无法访问服务器的问题_jellyfin绑定域名
- 9Ubuntu 安装pytorch指定版本_ubuntu torch==2.1.2 安装制定版本
- 10CentOS停服遭替代,这些操作差异,你了解了吗?_centos7.9 替代
文献学习-10-微创手术机器人的运动学设计考虑因素:综述
赞
踩
5.1.10 Kinematic design considerations for minimally invasive surgical robots: an overview
Authors: Chin-Hsing Kuo, Jian S. Dai, Prokar Dasgupta
Key words: robotic surgery; computer-integrated surgery; medical devices; medical robots; surgical robots; remote center-of-motion; mechanism design
Source: THE INTERNATIONAL JOURNAL OF MEDICAL ROBOTICS AND COMPUTER ASSISTED SURGERY Int J Med Robotics Comput Assist Surg 2012; 8: 127–145.

摘要
背景:运动学设计是微创手术机器人设计中的主要阶段。 然而,对于微创手术机器人的运动学设计问题,目前尚未提供给机械学和机器人学界一个全面的概述。
方法:对数百份关于微创手术机器人系统的档案报告和文章进行了回顾和研究。特别关注了现有机器人文献中描述的运动学设计考虑因素和机构开发。结果定义了微创手术机器人的一般运动学设计目标、设计要求和设计偏好。重新审视和研究了一种专门用于微创手术的机构,即远程运动中心(RCM)机构。根据RCM机构类型,提供了微创手术机器人的分类。 对八种不同的RCM类型进行了比较。 最后,讨论了微创手术机器人运动学设计面临的几个挑战。
结论:本研究详细调查了微创手术机器人的运动学设计,探讨了机构运动学家在微创手术机器人中的研究机会,并将在医学界明确了运动学观点的参考。
背景
微创手术(MIS)是一种通过小切口进行的手术。 微创手术的基本操作概念是将手术工具,例如腹腔镜、内窥镜摄像头、经皮针等,插入患者体内通过小入口,以便在手术工具尖端内部实施手术。为了提高微创手术的精确性和灵巧性,现代机器人技术早在1985年就被引入手术室,当时在微创神经外科手术中使用了标准工业机器人。 随着二十多年的发展,今天已经开发出许多专用的微创手术机器人来满足微创手术环境中的各种需求。
手术机器人是一个独立的控制台或更大的机器人系统的一部分,旨在帮助外科医生进行可能包括术前计划、术中匹配到术后验证和随访的手术程序。微创手术机器人可以是主动、被动或共同操作的机器人,靠近患者工作,既不是手动控制也不是计算机控制,用于操纵手术器械执行患者体内的术中微创任务。 最近,微创手术机器人甚至已经发展到非侵入性水平,整个机器人的实体可以无需任何切口直接进入患者体内。
运动学设计是微创手术机器人设计中的主要阶段。 在这个阶段,需要将一批常见和重要的微创手术关注点,例如安全性、准确性、人体工程学和灵巧性,转化为几个有意识的运动学设计考虑因素,例如机构拓扑、工作空间、各向同性等,以满足手术需求。 这些运动学设计考虑因素本身将构成一组独特的机构和运动学设计挑战,适用于微创手术机器人。 尽管这些运动学设计考虑因素显然对于微创手术机器人设计非常重要,但在机构和机器人学界仍然期待对它们进行全面的回顾和讨论。
因此,本文的目的是提供微创手术机器人的运动学设计考虑因素和机构开发的全面概述。 需要注意的是,在本文中我们只考虑传统的微创手术,即由“微创”切口施加工具运动约束的手术。 那些不需要“小入口”的特殊微创手术操作在这里不被考虑为“微创”手术。 例如,在神经外科中,如果手术需要去除相对较大的颅骨部分,但可以在不破坏脑组织的情况下进行术中治疗,我们不会将其视为一般的微创手术。另一方面,如果微创手术机器人基于主从概念,那么患者端操纵器是我们主要关注的对象,而外科医生端控制台在本讨论中不予考虑。 此外,那些使用“非侵入性”技术的机器人,例如自然腔道透镜内镜手术(NOTES)机器人和自主微型手术机器人超出了本文的范围。
需要注意的是,尽管不同类型的微创手术可能需要不同的手术工具运动,但在这里我们将腹腔镜手术中的工具运动视为常见微创手术的一般情况。在腹腔镜手术中,手术工具需要四个自由度的运动,包括三个旋转自由度和一个平移自由度。 然而,在许多其他类型的微创治疗中,所需的工具运动是腹腔镜手术中实现的四个自由度的子集。 因此,为了制定常见微创手术机器人的一般运动学设计考虑因素,我们将腹腔镜手术中的工具运动视为最一般的情况。
基于对文献和机器人辅助微创手术系统的回顾,本文旨在制定常见微创手术机器人的运动学设计目标、设计要求和设计偏好。 它还试图确定微创手术机器人操纵器的运动学设计在当前存在的限制和未解决的问题。
Methodology and Materials
A.微创手术机器人的运动约束
手术机器人的任务基本上是在手术过程中协助外科医生进行手术动作。 在微创手术中,运动要求包括两个基本问题。 首先,机器人需要操纵手术工具,进行一个旋转的4自由度运动。 其次,机器人操纵器的机械连杆和关节在手术过程中不应与患者的身体碰撞。
a. 操作灵活性
一般来说,微创手术器械是以长而窄的管状形式存在的,传统微创手术中由外科医生手动操作,机器人辅助微创手术中由机器人操纵器操作。手术器械通过一个小切口(在某些情况下辅助使用名为“气囊刀”的医疗器械)穿入患者体内,进行切割、缝合、结扎等手术操作。 有时,微创治疗需要多个切口,以便使用多个器械协同进行手术操作。 例如,传统腹腔镜手术需要三个切口,一个用于放置体内摄像头,其他两个用于放置腹腔镜。
可以看出,患者的身体自然地对手术器械构成了运动约束。 手术器械的横向运动受限于患者体表入口处的有限空间。 实际上,与手术器械相比,这个限定空间非常小。因此,这种排列在入口点形成了一个‘支点效应’ 因此,仪器的操作只能有四个自由度,即绕入口点的平移-倾斜-旋转(或称为滚动-俯仰-偏航运动)用于角度定位和沿轴向的平移用于穿透深度(图1)。

图1. 微创手术仪器的四个自由度运动。
如上所述,微创工具的运动自由度由以下几个方面描述:(1)沿工具主轴的插入长度,(2)关于枢轴点的倾斜和平移角度,以及(3)关于工具主轴的旋转角度。
因此,通过上述四个位移来表示工具的运动将更加方便,有助于运动学设计并简化机器人的控制策略。 这种特殊的协调位移如图2所示。 在该图中,P(x,y,z)是附加在枢轴点上的参考坐标系,其原点与枢轴点P重合,而E(u,v,w)是附加在末端执行器上的参考坐标系,其中w轴通过枢轴点P。 由于枢轴运动约束,无论末端执行器如何位移,w轴始终会通过点P。
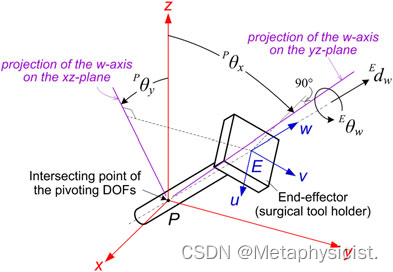
图2. 微创手术仪器中使用的四个实际自由度。
值得注意的是,虽然上述四个自由度足以处理一般的微创手术操作,但在某些微创应用中并非都需要全部。 例如,腹腔镜手术需要三个旋转自由度用于定位和一个平移自由度用于插入腹腔镜,而经皮针刺只需要两个旋转自由度用于定位和一个平移自由度用于插入针头。 然而,在本文中,我们将腹腔镜手术的四个自由度作为常见微创手术中的一般工具运动。 这种概括有助于讨论微创手术机器人的一般运动学设计考虑因素。
b. 体外工作空间体积
除了具有旋转4自由度运动外,机器人辅助微创手术还具有机器人的体外工作空间特性。为了避免机器人与患者身体之间的物理干扰,微创手术机器人通过患者身体上的小切口传递手术工具,应该在患者身体外工作。机器人的每个可移动机械链条(除了机器人上的手术工具及其相关仪器)在手术过程中必须在手术室内自由移动,但不能接触患者。因此,这在机器人操纵器设计中引入了另一个重要的运动要求,即操纵器的结构应该如此良好,以至于在手术操作的运动范围内机器人与患者之间不会发生干扰。 同时,体外操纵器应该控制在入口点处执行旋转运动的手术工具,该入口点应该位于操纵器的工作空间之外,并且最好与操纵器的实体有一定的距离。
B. 微创手术机器人的一般手术问题
与工业机器人相比,手术机器人是高度人机交互的机器人,因此在设计机器人操纵器时必须考虑人因素。实际上,在评估微创手术机器人的性能时,一些基本的手术问题是必要甚至是关键的。 如上所述,由于微创手术机器人是一种专用机器人,其设计规格将根据不同的手术类型或目标解剖部位而异(即使已经开发了几个系统来处理大范围的手术适应症,它们的应用仍然受到限制)。然而,在这些以案例为导向的设计考虑因素中,仍然可以得出一些通用的设计要求,这些要求在大多数机器人辅助微创手术中是有效的。
总结一些用于一般微创手术机器人运动学设计的设计目标(DG)
安全性
DG1. 入口点的运动学约束。
DG2. 机械臂、外科医生和患者之间的无碰撞工作空间。
DG3. 手术工具的旋转和平移自由度解耦。
安全性是机器人手术应用中最重要的关注点。 在设计手术机器人时,安全问题涉及多个阶段,涉及各种主题,如消毒、感染控制、传感和编程等。就微创手术机器人的运动学设计而言,可以实现三个关于安全性的基本设计目标。 前两个设计目标,DG1和DG2,直接源于微创手术机器人的运动约束。 为了产生入口点的运动学约束,机器人操作器应该被适当配置,以便末端执行器的所有旋转自由度可以汇聚到一个固定点,并且平移自由度可以指向插入/回退工具的方向。 至于无碰撞问题,纯外部机构是最佳选择,其运动学链和关节(除了体内工作部分)在整个运动周期中从不接触患者的身体,以克服安全问题。 此外,更安全的机器人操作器将是最小化操作器整体机械运动以实现所需工具末端运动的操作器。
另一方面,第三个设计目标,DG3,建议一个更安全的微创手术机器人应该是在进入患者体内的入口处将仪器的旋转和平移自由度解耦。当手术工具的平移自由度与旋转自由度解耦时,如果只需要旋转运动,则可以禁用(或省略)平移执行器。
此外,当与穿刺点相关的自由度全部或部分解耦时,可以使执行器的尺寸适应所需的解耦自由度的运动速率。 此外,解耦的运动学可以通过手动操作的离合器或可逆传动更快地手动定位整个机构或选择的自由度。 因此,系统控制和一些安全检查可以有效地简化。
准确性
DG4. 输出位移/输入位移比率
准确性无疑是大多数机器人应用中的主要设计要求之一。 事实上,对于手术机器人来说,它更加关键,因为任何不满意或意外的位置误差可能给患者或外科医生带来无法挽回的危险。广义上讲,手术机器人的高精度可以通过多种方式实现,例如容差敏感性、反馈控制、制造精度等。在运动学设计阶段,微创手术机器人的运动学精度主要取决于机械臂的拓扑结构和尺寸。 为了量化微创手术机器人的运动学不准确性,已经提出准确性度量可以指的是末端执行器在最小关节空间位移的基础上,实现其工具尖端的最大位移(包括三个方向的平移和三个方向的旋转)的能力。 因此,输出/输入位移比率越小,机器人的运动学精度越好。 因此,相应的设计目标可以表述为上述的DG4。
然而,我们应该注意到,虽然输出/输入位移比减小了,机器人手臂的体外工作空间可能会变大。不幸的是,这可能会降低追求最小体外工作空间甚至无碰撞工作空间时的安全信心。 在设计微创手术机器人时,安全信心和运动学精度之间的这种权衡应该谨慎协商。 为了避免这种情况,一个可能的解决方案可能是使用齿轮传动,它可以确保高的输入/输出减速比以提高精度,而不会减少工具工作空间。
总之,无论使用何种机构类型,满意设计的最低要求应该是精度测量尽可能小,同时保证无碰撞工作空间。
人机工程学
DG5. 手眼协调。
DG6. 末端执行器的旋转能力。
人体工程学是一门与优化用户性能有关的科学,涉及到机器和工具的设计,考虑到用户的限制。微创手术的人体工程学问题包括广泛的关注点,可以归类为可视化、操作、外科医生姿势、心理和身体负荷以及手术室环境人体工程学。在设计微创手术机器人时,这些主题分散在许多不同的阶段,例如视频设置、机械手设计、触觉系统等,贯穿术前、术中和术后干预。
在运动学设计阶段,微创手术机器人的人体工程学关注点属于操作人体工程学。对于机器人辅助微创手术,手术工具由机器人手臂(在主-从机器人或主动机器人中)或外科医生的手(在被动手术工具中)握持。
在额外机构的末端设置一个支架,由于工具进入点的 ‘支点效应’,机器人手臂或外科医生的手的方向运动反映出患者体内器械尖端的相反运动,导致视觉实现和感知操作之间的倒置。目前,大多数微创手术机器人通过控制校正来解决这个问题,在其中坐标系统从器械尖端镜像到手术工具的握持部分。然而,从机械结构设计的角度直接解决这个问题将是一个有趣的问题。
另一方面,由于传统的手术中MIS器械是由外科医生的手握持,手动操作会引起人体工程学问题,如手腕过度弯曲、旋前、尺桡偏斜等问题。 这也可能在MIS机器人中得到体现,因为其机械手具有不利的旋转能力(即旋转自由度不足、角度受限、末端执行器奇异性不当)。 例如,器械在患者体内的微小倾斜角可能导致末端执行器过度旋转的角度。 例如,器械的两个目标角度可能无法从一个角度到另一个角度到达,因为它们可能位于两个不同的机构分支中。 因此,在设计微创手术机器人操纵器时,应将末端执行器的旋转能力视为重要的性能指标。
灵巧性
DG7. 手颤抖减少。
DG8. 手术运动缩放。
引入机器人技术到微创手术中最显著的优势之一是可以极大地增强传统手术操作的灵巧性。 机器人系统可以通过改善传统手术中的两个主要限制来增强手术灵巧性:减少手颤抖和手术运动缩放。 这两个因素已经将手术操作推向了更精确的微创手术尺度。在当前的微创手术机器人中,手颤抖减少和手术运动缩放的验证是通过计算机控制系统(主要)和机械臂尺寸匹配(次要)来完成的。
在运动学设计阶段,机器人需要通过考虑仪器运动与末端执行器或驱动运动之间的合适缩放比例来进行尺寸综合。 根据不同的设计要求,将从不同的角度评估合适的缩放比例。 例如,从精确性的角度来看,微创手术机器人的(运动学)缩放比例(仪器尖端位移/输入位移)应尽可能小。
C. 微创手术机器人的运动学设计考虑因素
工具运动表示图2表明,微创手术工具的运动通常由四个位移表示,即P、θ、x和y。因此,如果手术工具的位置可以与四个几何参数相对应,分别对应于四个运动位移,那将更方便。
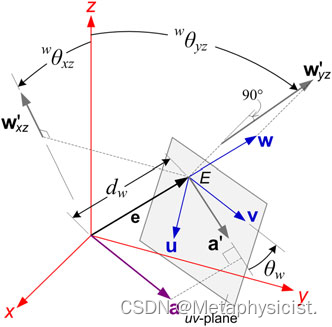
图3. 用于表示手术工具位置的投影表示


请注意
p
≤
w
θ
y
z
,
w
θ
x
z
≤
p
p≤^wθ_{yz},^wθ_{xz}≤p
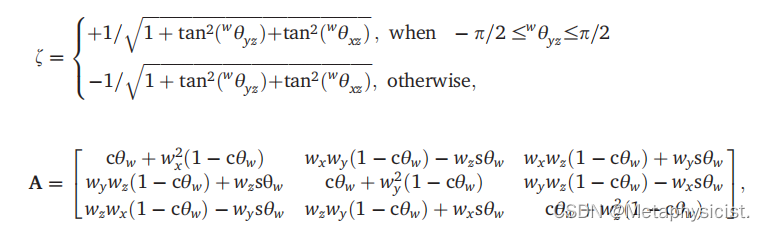
p≤wθyz,wθxz≤p和旋转矩阵A是由Rodrigues’旋转公式推导得出的。其中
c
θ
w
cθ_w
cθw是
c
o
s
θ
w
cosθ_w
cosθw的简写,
s
θ
w
sθ_w
sθw是
s
i
n
θ
w
sinθ_w
sinθw的简写。
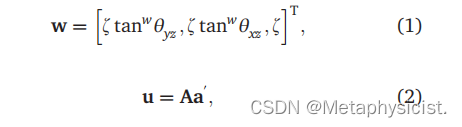
向量a可以被具体选择来帮助定义自旋角度
θ
w
θ_w
θw的更方便的方式。例如,它可以被选择为x轴的单位向量,y轴的单位向量,或者在xy平面上的w轴的投影向量等。在获得向量w之后,可以计算出相对于固定坐标原点的位置 E(u, v, w)。

其中,
d
w
d_w
dw是坐标系E(u,v,w)和P(x,y,z)之间的距离。反之,如果已知E(u,v,w)的位置,则可以找到三个角度几何参数,如下所示:

注意,'atan2’表示双参数反正切函数。
旋转运动
研究表明,MIS机器人手持的手术工具应该通过4自由度的旋转运动来操作,包括三个旋转自由度和一个平移自由度。根据这个运动约束,可以得出MIS机器人的三个设计要求(DR)如下:
DR1. 末端执行器应具有四个自由度的运动,包括三个旋转自由度和一个平移自由度。
DR2. 三个旋转自由度的轴线应在某一点(切口点)相交,该点应距离机械手一定距离。
DR3. 平移自由度应始终指向手术器械插入或收回的方向。 换句话说,平移自由度必须相对于末端执行器沿着固定直线移动。
解耦运动
在手术安全的设计目标中,手术器械的解耦运动可以提高安全性的信心。 为了应对这一问题,可以提出以下微创手术机器人操纵器的设计偏好(DP):
DP1. 更喜欢机器人末端执行器的解耦运动。
此外,参考图2,另一个解耦运动的设计偏好如下所示:
DP2. 更好的解耦设计是部分或全部 (1)两个方位角度
P
θ
x
^Pθ_x
Pθx和
P
θ
y
^Pθ_y
Pθy ,(2) 旋转角度
E
θ
w
^Eθ_w
Eθw,以及 (3) 轴向平移
E
d
w
^Ed_w
Edw与其他变量解耦。
考虑到设计偏好 DP1 和 DP2,最佳的解耦微创手术机器人将使每个操纵自由度
P
θ
x
,
P
θ
y
,
E
θ
w
,
^Pθ_x,^Pθ_y,^Eθ_w,
Pθx,Pθy,Eθw, 和
E
d
w
^Ed_w
Edw相互解耦。
否则,下一个最佳选择是其中一些四个位移变量可以独立控制。
工作空间
工作空间确定是微创手术机器人的关键设计任务。 根据手术工具的运动约束,可以实现以下关于工作空间生成的设计要求和设计偏好,用于微创手术机器人:
DR4. 末端执行器的工作空间必须在进入点处被机械地限制为一个单点或极小的空间体积。
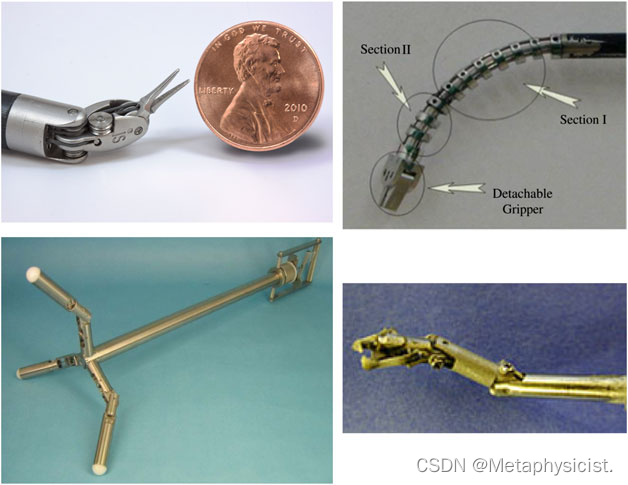
图4. 体内工具灵巧性增强:(a)达芬奇EndoWrist; (b) 连续机器人 (19); © 多指;(d) 超手指。
DR5. 与手术仪器相关的机器人操纵器应能够生成足够的可达工作空间,即患者体内的空间。
DR6.操纵器的体外工作空间不应与患者发生碰撞。
DP3. 机械手臂的体外工作空间应尽可能小,以防止与外科人员发生碰撞。
在上述情况中,DR5是一种以任务为导向的要求,即这种足够可达工作空间的边界取决于机器人所应用的外科任务。 基于这些运动约束,我们可以得出结论,MIS工具尖端生成的可达工作空间体积是一个顶点位于入口点的锥体。通过分析在动物模型体内在MIS环境中执行的一般外科任务的数据库,95%的时间MIS外科工具的定位包括一个60°锥体。 由于预计工作空间锥体内的所有点都可以以一定范围的角度接近仪器,因此提出将这种锥体状工作空间不仅作为可达工作空间,而且作为部分灵巧工作空间。
不幸的是,在末端执行器上施加了一个旋转约束后,无论是串联型还是并联型机器人都无法生成腔内灵巧的工作空间。 处理这个限制的常用策略是增强体内仪器尖端的灵巧性。 可以通过在仪器尖端附加一个高自由度机构来实现,例如da Vinci的 EndoWrist (图4(a)),连续机器人 (图4(b)) 或迷你人形机器人手 (图4© 和 (d))。
应对有限灵巧工作空间的另一种方法是将目标工作空间的级别和体积缩小为一个较小但可行的空间。实际上,如果手术工具的穿透深度和扫描范围是主要问题(例如在针导引干预中),工作空间确定可以简化为可达到工作空间的生成。 相反,如果仪器的方向是关键因素(例如在内窥镜检查中),则适合采用方向工作空间进行工作空间合成任务。 对于那些可达到和方向工作空间体积同样重要的设计(例如在腹腔镜检查中),可以考虑在这两个工作空间之间进行折衷。 为了设计这样一个折衷系统,优化技术经常被使用,其中权重函数可以用来表示不同类型的重要性和重要性。
各向同性
各向同性,有时也被称为手术机器人的可操纵性,是衡量机器人在给定配置下的运动和力/扭矩传递能力的指标。 当机器人的驱动运动和力可以最好地反映在该配置下的末端执行器上时,机器人操纵器被认为处于各向同性配置。 此外,如果机械手在整个工作空间内都是各向同性的,则被称为完全各向同性。 从理论上讲,如果以下方程在整个工作空间内成立,则具有n自由度的机械手是完全各向同性的:

其中
x
H
=
[
x
1
;
x
2
;
.
.
.
;
x
n
]
T
x_H = [x_1;x_2;...;x_n]^T
xH=[x1;x2;...;xn]T 是一个向量,表示末端执行器上一点在固定坐标系下的速度空间,
q
=
[
q
1
;
q
2
;
.
.
.
;
q
n
]
T
q= [q_1;q_2;...;q_n]^T
q=[q1;q2;...;qn]T是关节的速度向量,
J
T
J_T
JT 是满足以下条件的雅可比矩阵:

我们可以快速得到JT的一个可行解。 我们观察到当JT是一个对角矩阵时,方程(8)和(9)可以同时满足。 此外,如果JT的对角元素都相同,即每个参数k的速度比
x
k
/
q
k
x_k / q_k
xk/qk相等,即每个执行器的力/力矩传递性相等。然而,我们应该注意到为了满足方程(8)和(9),
J
T
J_T
JT不一定是对角矩阵。 对角矩阵只是
J
T
J_T
JT的一个特殊情况,这表明在确定机器人的完全各向同性配置时,雅可比矩阵相对简单。
等效性可以用作指标来显示手术工具尖端的力/扭矩测量。 对于微创手术机器人,等效性意味着对手术工具的激励指令的响应,即激励产生的运动和力量能够有效传递给工具。 反过来,它还意味着组织对工具的力量或扭矩对激励的响应,在考虑微创手术机器人的触觉设计时将进行研究。 因此,对于微创手术机器人,等效性的设计偏好可以如下规定:
DP4. 优选具有整个工作空间上良好各向同性的机器人操纵器。
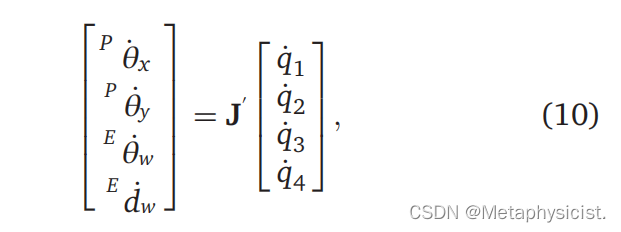
请注意,方程(8)和(9)的各向同性条件将输入变量与固定坐标系中末端执行器的速度相关联。然而,当手术工具运动可以通过四个重新协调的位移来表示,如图2所示,方程(8)不再适用于表示MIS机器人的实际可用各向同性配置。 为了克服这个问题,可以采用以任务为导向的全各向同性MIS机器人操纵器条件。 对于非冗余的MIS机器人(即,驱动关节的数量等于机器人的可动性),任务导向的全各向同性条件可以表述为:
其中
q
1
,
q
2
,
q
3
q_1, q_2, q_3
q1,q2,q3, 和
q
4
q_4
q4 是四个关节的速度, J′是一个任务导向的雅可比矩阵,满足以下条件:
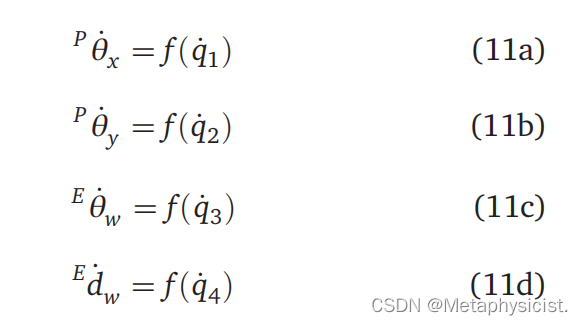
我们应该注意,在方程(10)中,末端执行器的速度空间是相对于两个不同的参考坐标系来表示的,这样才能适当地描述微创手术的实际可用等各向同性条件。 因此,雅可比矩阵 J′ 不是传统的雅可比矩阵,而是一个修改后的、任务导向的雅可比矩阵。由于任务导向雅可比矩阵中元素的单位不一致,当操作这个修改后的雅可比矩阵时需要非常小心。
从理论上讲,以任务为导向的全向性机器人不仅在运动学解耦方面具有优势,而且在力敏感性方面也更为出色。 然而,在实际情况中,一个全向性或以任务为导向的全向性微创手术机器人非常难以创建。 一般来说,在设计微创手术机器人时会使用优化设计以满足等向性条件。 例如,一些微创手术机器人通过优化技术或通过分析选择雅可比矩阵条件数或其他指标来确定最佳等向性。 另一种方法表明,可以根据选择最佳RCM位置来确定微创手术机器人的更好等向性。
可逆性
在手术机器人中使用可逆性或不可逆性传动已经是多年来一个重要但有争议的讨论话题。 在考虑不同的设计目标时,可逆性和不可逆性传动都有其优点/缺点。 可逆性传动允许在意外停电的情况下手动重新定位手术工具,而不可逆性传动则不允许。
传动系统的建议更能增加安全性,因为在电源故障后,机械臂将保持静止。 在权衡可逆和不可逆系统时,使用可逆传动系统和互补的静态平衡机制可能是应对断电情况的合适解决方案。
冗余性
冗余机械臂是指具有冗余驱动或冗余自由度的机构,即驱动冗余和运动学冗余。
驱动冗余是指驱动器数量大于机构的可动性。运动学冗余是通过添加运动学链和关节以及驱动器来增加机构的可动性和驱动器数量(但二者相等)。
例如,如果一个平面串联机器人由三个平行旋转关节组成,其末端执行器理论上可以在平面上的任意点以任意方向进行运动。 然后,如果我们再添加一个与这三个关节平行的旋转关节到机器人中,末端执行器仍然可以进行平面运动,但机器人的链和关节数量增加了。 在这种情况下,我们说机器人具有运动学冗余。
在一般的机器人应用中,采用执行冗余和运动学冗余来保证更大的工作空间,增加灵活性,并避免构型奇异性。 对于手术机器人,特别是它们还可以用于增加安全性的信心。 从理论上讲,执行冗余为控制灵活性提供了更多的自由度,从而可以减少由于控制的无意故障或患者身体意外移动而引起的潜在危险。 另一方面,运动学冗余提供了额外的自由度,允许机器人在不改变仪器的位置/方向的情况下重新配置,以适应更灵活的手术室设置。
在大多数引入冗余的微创手术机器人中,执行冗余似乎比运动学冗余更常用。 一个主要原因可能是执行冗余可以显著提高机器人的安全性。 另一个原因可能是运动学冗余的机械结构会更复杂,从而不利地增加了机器人的体外工作空间。
远程运动中心机制
我们已经了解到,微创手术机器人必须沿着穿刺方向移动其手术工具,并围绕患者身体上的一个固定点旋转。 此外,体外工作空间体积必须确保机器人操纵器在手术过程中不与患者发生碰撞。 一般的多自由度机器人当然可以通过精细的控制策略来实现这些目标;然而,基于结构约束本身实现这些所需运动的特殊配置的机器人会更好,因为可以自动避免由于任何控制或协调失效而对外科医生和患者造成的潜在危险。
上述动机鼓励研究人员开发一种机制,可以在机器人结构本身之外的一定距离处输出一个固定的旋转中心。 基于此,提出了远程运动中心(RCM)的概念。 几何上,RCM是与机构相关的一个固定点,围绕该点机构的某些连杆进行旋转。 此外,当机构在给定的运动范围内运动时,该点应位于由所有其他连杆生成的工作空间体积之外。
简而言之,我们可以立即理解RCM是一个位于机构工作空间之外的连杆的固定旋转中心;RCM机构是具有一个或多个RCM的机构;而RCM机器人是包含一个或多个RCM机构以生成RCM的机器人。
解耦的远程运动中心机制为了进一步降低控制复杂性并增强操作方便性,建议使用解耦的远程运动中心机制。 解耦的运动学可以大大降低控制复杂性并增加安全性的信心。 此外,它允许更快速地手动定位整个机构或选择自由度的子集。
解耦的RCM机制是一种RCM机制,其中旋转的枢轴自由度和相关的平移自由度(如果有的话)部分或完全解耦。 具体而言,考虑一组变量D = (x1, x2, …, xi),i = 1到n,它们指定了机构中输出链接的运动空间。 此外,假设D中的n个变量由n个无冗余的执行器控制。 如果变量xi的值可以由一个相应的执行器确定,则我们说变量xi与D解耦。 如果有n-j个变量,n-j<n,其值与某些执行器无关,则我们说该机构的自由度部分解耦。如果D中所有变量的值都可以通过执行器一对一确定,我们称该机构的自由度是完全解耦的。
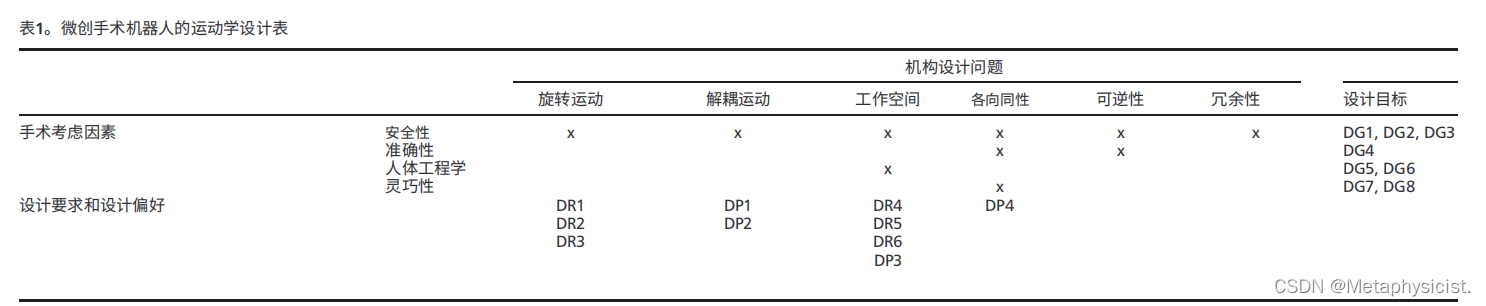
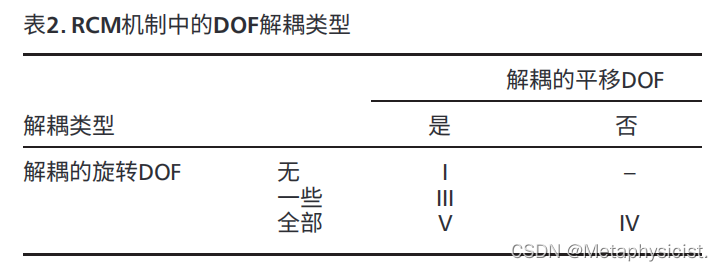
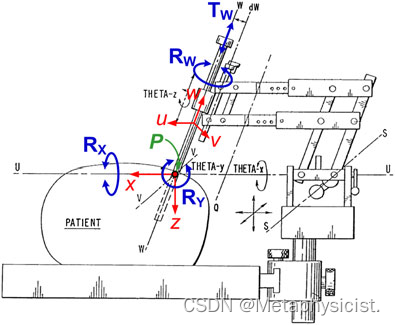
图5. 用于腹腔镜手术的部分解耦RCM机制。
值得注意的是,在大多数微创手术机器人中,RCM机构只能生成2个自由度的方向,即手术工具的旋转运动 θ 和平移运动 d 通常通过在输出 杆上安装的两个附加执行器来实现。 然后,这两个执行器将直接和独立地驱动手术工具旋转和上下移动。 显然,这种安排提供了一种相对简单、直接的方式来补充提供四个解耦自由度。然而,附加的仪器化装置可能会增加附加负载在末端执行器和机器人的机械复杂性。
MIS机器人中RCM的验证
由于其在控制简单性和安全性方面的优势,使用具有RCM设计的专用MIS机器人已成为常态,而不是使用通用工业机器人进行MIS任务。 RCM功能可以通过多种方式集成到机器人中。 我们可以将RCM机制模块附加到机器人手臂上,集成一些机械连接件。将机器人操纵器的一部分与嵌入式RCM机制结合,或将机器人操纵器本身作为RCM机制。 分别显示了三种仪器的示例,图6至图8。机械式RCM和被动式RCM在RCM机制中,RCM基于机构的运动学被定义和机械锁定。然而,在非机械式RCM中,通过高自由度机器人的多个关节的协调控制来产生枢轴运动。
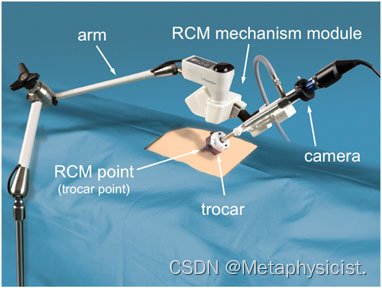
图6. 带有附加RCM机制模块的微创手术机器人 –FreeHand机器人。
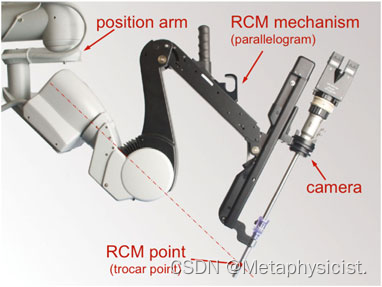
图7. 带有嵌入式RCM机制的微创手术机器人 – 达芬奇机械臂。
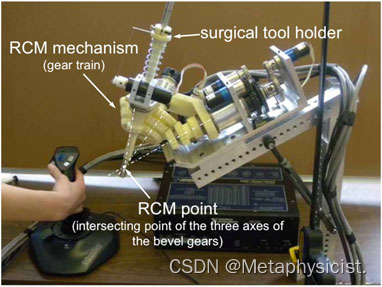
图8. 以RCM机制形式实现的微创手术机器人 – CoBRASurge机器人。
具有可变的枢轴位置和增加的机动性等多种优点。 然而,对于外科手术应用来说,机械式RCM由于其减少的自由度、解耦的运动、控制器简化和锁定枢轴功能而被认为更安全。
另一种特殊类型的远程运动中心是‘被动RCM。 在这种概念中,机器人使用切口本身作为机械固定装置来限制工具运动,但保持一些关节是被动的。 例如,图10显示了一种主动式腹腔镜支架,根据被动RCM的概念,在切口处限制腹腔镜的旋转。两个被动旋转关节位于臂的远端(图中的部分C),使腹腔镜能够在切口点自行旋转。 需要注意的是,被动RCM的工作原理与机械式和非机械式RCM不同。在被动RCM机器人中,机械臂由机械构件组成;然而,其RCM是通过非机械的物理约束实现的,这些约束是不可编程的。
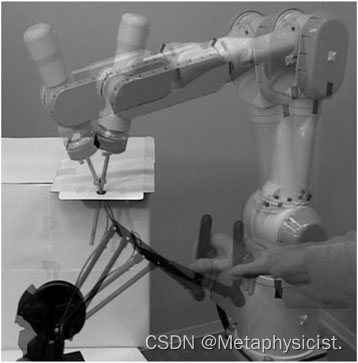
图9. 非机械式RCM:MARGE机器人。
一种对微创手术机器人的运动学结构进行分类的方法是基于RCM机制的类型。 简而言之,微创手术机器人中使用的RCM机制有八种类型:等心点、圆弧轨迹、平行四边形、同步皮带传动、球面连杆、万向节、平行腕机构和齿轮传动。 每种RCM机制类型的概念框图和一个示例微创手术机器人列在图11中。
Conclusion
在表4中比较了八种RCM机构类型的运动学特性。 RCM机构的自由度、运动解耦性、体外工作空间、任务导向性和可逆性在表中列出。 这些结果是基于作者在运动学和外科机器人领域的经验和文献和设备研究的基础上得出的。

图10.被动RCM:EVOLAP腹腔镜支架。
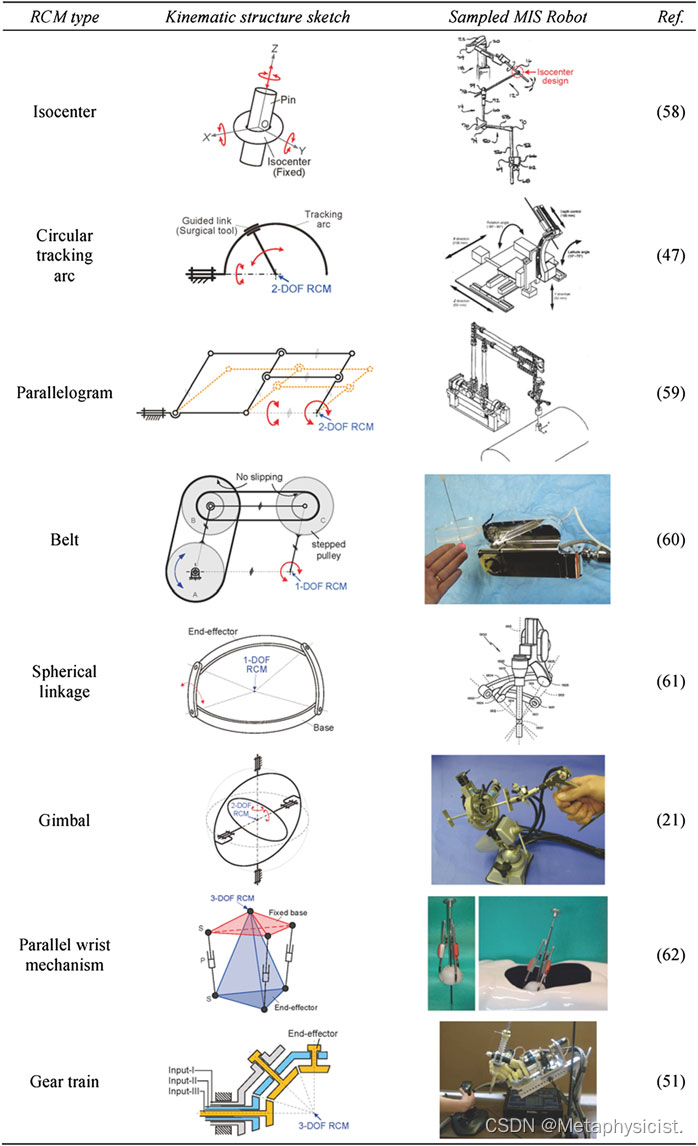
图11. 八种RCM机制类型及其MIS机器人示例。

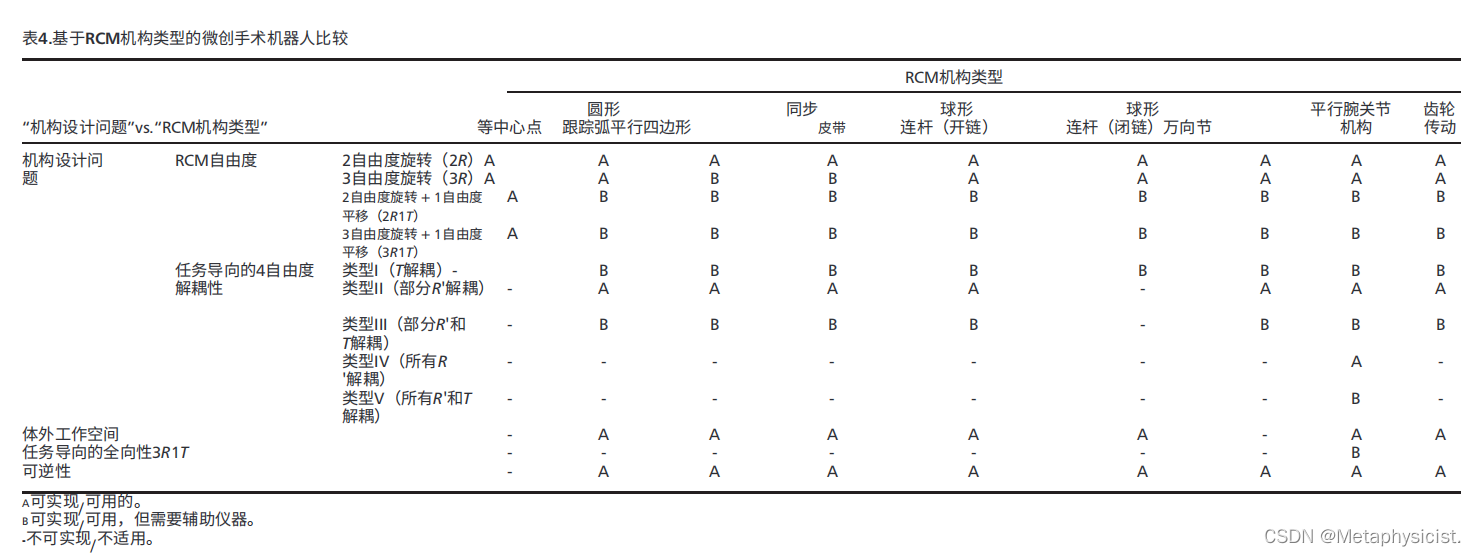
就运动解耦性而言,最好的RCM机构是其任务导向的自由度完全解耦的机构。 然而,在当前微创手术机器人的概述中,大多数RCM机构只是部分解耦。面向任务的全各向异性RCM机制对于提供更高的安全性、简化关节协调以及感知MIS需求下组织的反作用力和扭矩非常有用。因此,对于机器人机构学家来说,这仍然是一个有趣且开放的问题。
Reference
[1] Kuo, C. H., Dai, J. S., & Dasgupta, P. (2012). Kinematic design considerations for minimally invasive surgical robots: an overview. The International Journal of Medical Robotics and Computer Assisted Surgery, 8(2), 127-145.
Note
戴建生,南方科技大学机械与能源工程系讲席教授,机器人研究院院长,伦敦国王学院荣誉教授。英国皇家工程院院士,欧洲科学院院士,IEEE Fellow, ASME Fellow, RSA Fellow, IMechE Fellow,CAA Fellow。国际机器人旗舰期刊 Robotica主编,Mechanism and Machine Theory方向主编,高等教育出版社“机器人科学与技术”丛书主编。长期从事理论运动学、机构学与机器人学的基础理论与应用研究,在旋量代数、李群、李代数等领域具有深厚的数学基础和造诣。在变胞机构、可重构机构与可重构机器人等各类机器人机构,以及这些机构在康复与制造技术领域应用上做出了许多开创性与国际领先的工作。2015年获得 ASME “机构学与机器人学终身成就奖”,为该奖设立41年来第27位获奖者。2020年获得 ASME “机械设计终身成就奖”,为该奖设立62年来第58位获奖者。

