
- 1Zabbix配置监控磁盘空间和配置触发器小于10TB自动告警_zabbix监控硬盘容量mounted filesystem discovery
- 2zzulioj 1000: 从今天开始入坑C语言
- 3报错net/javacrumbs/shedlock/core/LockProvider
- 4C语言实现TCP服务器与客户端通信_c语言设计程序,要求当客户端连接到服务器一端时,服务器会显示连接的提示信息,并反
- 5python中科学计数法怎么表示_python科学计数法转换
- 6xss获取cookie
- 7流媒体-RTP-RTCP协议解析-RTSP流的传输与控制(二)_不在同一网段的rtsp流怎么传输
- 8Java毕业设计 基于Springboot+vue的网上综合超市商城购物网站_网上超市springboot项目
- 9源码开放:基于Pyecharts可视化分析苏州旅游攻略_基于pyecharts的旅游保险数据分析文献
- 10嵌入式C编程中的设计模式之一——单件模式和策略模式_单件模式应用
论文解读 | 基于视觉的水果采摘机器人识别与定位方法研究进展_基于视觉的采摘机器人csdn
赞
踩
原创 | 文 BFT机器人

01
背景
在复杂的农业环境中,利用机器视觉及其相关算法可以提高收割机器人的效率、功能性、智能化和远程互动性。对于水果采摘机器人系统来说,主要的挑战包括免提导航和水果定位,以及大多数果园中常见的崎岖地形和大型障碍物。这些挑战会在移动采摘机器人穿越地形时在其视觉系统中引起严重的振动,因此需要采用动态目标跟踪和自动图像去模糊算法。
研究人员通过在视觉识别和位置检测方面取得进展来解决这些挑战,包括分割水果及其相关算法,以及通过立体匹配重建的三维水果,以计算果实目标的空间坐标。此外,跨学科研究人员正努力开发通过视觉软件进行智能决策的算法,以提高在田间环境中在不同光照和遮挡条件下识别和定位的准确性。
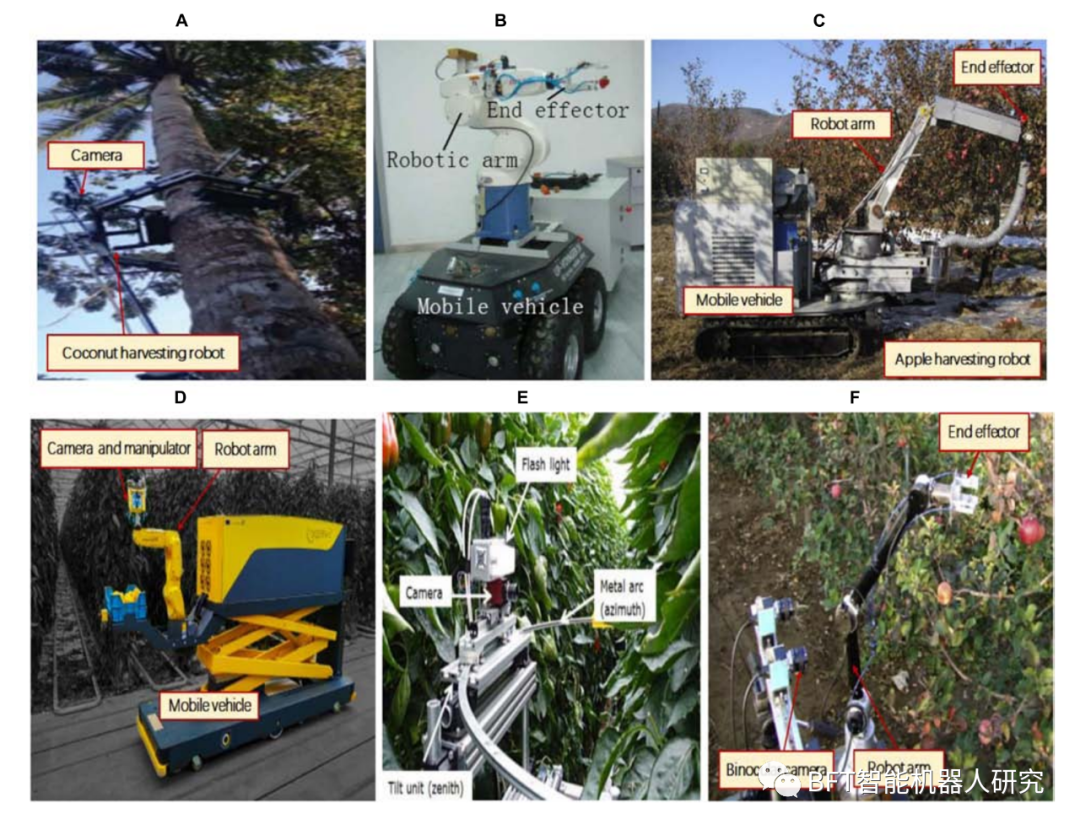
图1 目前基于视觉的采摘机器人
02
综述
该论文综述主要介绍了以下几点内容:
1. 机器视觉和其相关技术在复杂农业环境中提高采摘机器人效率、功能、智能化和远程交互性的应用前景。
2. 视觉和定量方法在复杂农业环境中的定位、目标识别、三维重建和容错等方面的潜在应用。
3. 针对机器视觉和机器人系统设计的容错技术,以提高采摘机器人的可靠性和稳定性。
4. 基于视觉的水果采摘机器人的研究成果和应用案例,如基于深度学习的水果识别、基于立体视觉的水果定位和基于协作控制的机械臂操作等。
总之,该论文的创新点在于介绍了机器视觉和其相关技术在水果采摘机器人中的应用前景和研究进展,以及探讨了一些解决机器视觉和机器人系统设计中的技术难题的方法和技术。
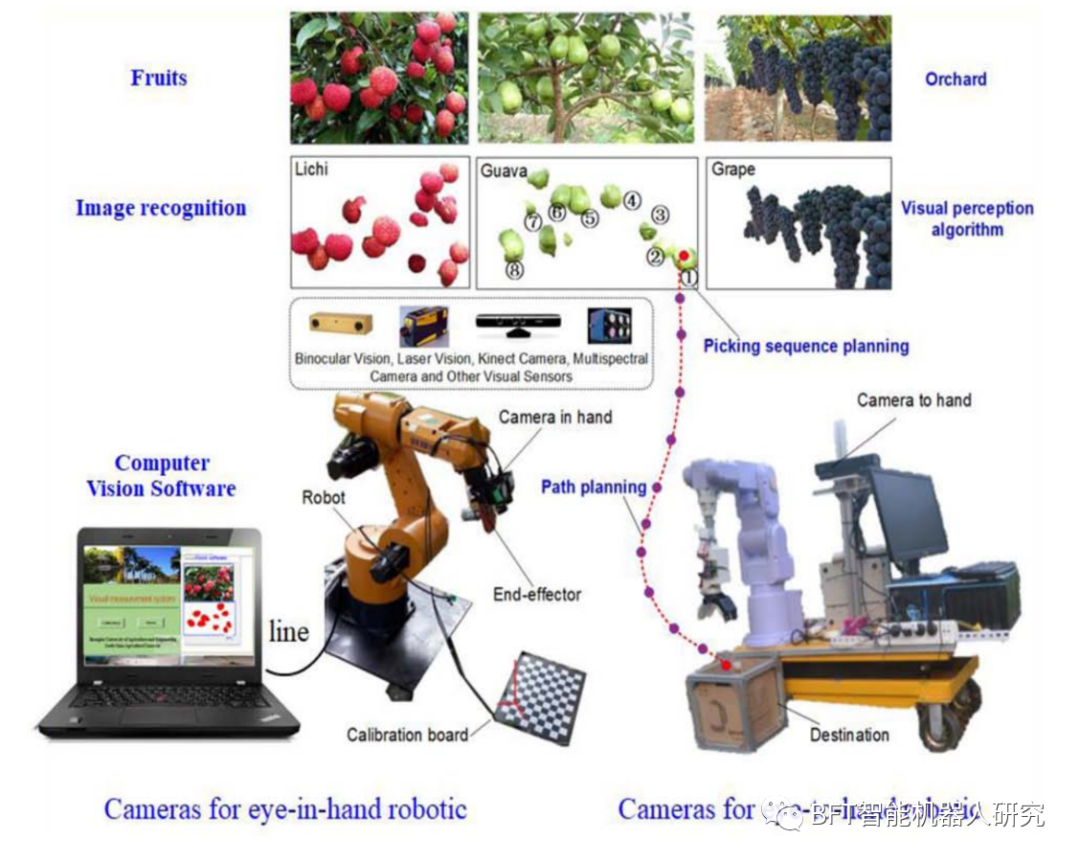
图2 基于视觉的采摘机器人
水果采摘机器人的视觉系统具有多种感知能力,包括视觉感知、协同视觉机械控制、视觉识别、三维重建、协调的视觉机械定位和容错性。这些能力可以应用于各种类型的水果和作物,基于视觉的采摘的有效性可能取决于水果或作物的大小、形状、颜色、纹理,以及周围环境的复杂性等因素。
这个系统包括作物识别和定位、机器人机械臂的立体视觉和协同行为控制,以及错误处理。系统通过收集一组图像并提取关于目标的信息来识别作物。为了识别水果,系统通过空间坐标计算来处理生成的水果、果枝和果枝上的障碍物的三维重建。完成这些计算后,计算得到的空间坐标被传输给机器人的驱动系统。系统控制机器人的工作,通过视觉软件来实施算法和智能决策。
当在田间环境的光照和遮挡条件下,作物的环境发生变化时,识别和定位的准确性会受到影响。研究人员应用了几何特征、图像特征、新的图像算法和智能决策理论来解决这个问题。在大多数图像算法中,当前的深度学习算法需要大量样本数据。在农业作物中,有时只能获得小规模的数据集,比如未成熟的水果或受害虫问题影响的作物。处理这些小型数据集的深度学习图像识别方法需要进一步的研究。

图3 苹果三维点云识别
尽管人工智能及其深度学习方法提高了识别率,但由于农业环境的复杂性和不确定性,视觉系统应用中仍然存在较大的定位误差。因此,需要将机器人的控制系统与机构的创新设计结合起来,以改进视觉和综合容错技术,实现精确定位和操作。
值得进一步研究的是,将人工智能技术与机器人的主动容错和智能行为决策相结合。农业采摘机器人在运行过程中会受到外部力的动态干扰。关键技术是对不规则形状水果的曲面进行动态跟踪。对于视觉采摘机器人来说,高精度物体的动态跟踪仍然是一个未解决的问题。
03
结论
文章总结认为,基于视觉的水果采摘机器人在提高农业收割效率和效果方面具有巨大潜力。机器视觉及相关技术的应用可以帮助克服水果采摘机器人的技术挑战,如自主导航、水果定位和识别等问题。文章还强调了在水果采摘机器人设计中协同控制和容错性的重要性。
总的来说,文章指出,基于视觉的水果采摘机器人在农业领域有着光明的前景,并可以为可持续和高效的农业实践的发展做出贡献。
作者 | Azukii
排版 | 小河
审核 | 猫
若您对该文章内容有任何疑问,请与我们联系,我们将及时回应。如果想要了解更多的前沿资讯,记得点赞关注哦~

