
- 1Linux工具【1】(编辑器vim、编译器gcc与g++)_vim环境 g++环境
- 2cef在android中使用_Android程序中,内嵌ELF可执行文件-- Android开发C语言混合编程总结...
- 3Markdown语法_csdn 写文章时 markdown怎么显示#
- 4SpringBoot+Mybatis+MySQL的pom依赖_springboot + mybatis +mysql8 的pom文件依赖
- 5手把手带你用Python和文心一言搭建《AI看图写诗》网页项目(附上完整项目源码)_python怎么实现ai
- 6Shell脚本-全局变量、局部变量、环境变量_shell 全局变量
- 7边缘计算的端、边、云:分层分级的数据处理新模式_端边云
- 8kubesphere多集群管理,实现kubernetes多集群同时应用部署_kubesphere部署应用
- 9Ubuntu 下用 Eclipse 编译调试 Android NDK 工程_[discovery options] page in project properties ecl
- 10电源管理之pmu驱动分析
“手搓”无人机富哥版-1.基础介绍
赞
踩
相较于另一个博客的更加完整版
前言:无人机目前不仅在商业应用上十分广泛,在院校的科研和比赛项目上都有很大的需求,接下来,我会尽我所能去介绍无人机,让大家更好的入门。
当然我的这部分知识比较浅显,我个人水平也有限,如果对您没有帮助,那很抱歉,我继续努力,不过还是希望有人能从我这里学习和了解到需要的东西。
一.硬件介绍
1.轴距380的四轴机架 *1
2.好盈40A电调 *4
3.电机 *4
4.分电板 *1
5.雷迅X7+ Pro飞控 *1
6.JESTON Xavier NX *1
7.英伟达 D435I 深度相机 *1
8.at9s 接收机 *1
9.at9s 遥控器 *1
- 固定件和配件若干
如果大家是第一次组装无人机,那么我推荐先买一个成品正常X布局的机架,有了经验再去制作新机架,没有钱可以把飞控的标准降,Pixhawk2.4.8是一个性价比很高的飞控
饭要一口一口吃,我们就先从无人机的核心,飞控来。
二.飞控介绍
1.飞控介绍
大家第一次做无人机肯定会有疑问,飞控是什么,它的作用是什么。我的理解是,飞控是无人机的大脑,它发布各种指令来控制电机转速,以此来移动无人机;同时它还可以读取各种传阿感器的数据来帮助飞控判断。
另一个我就以雷迅飞控为例从另一个方向介绍
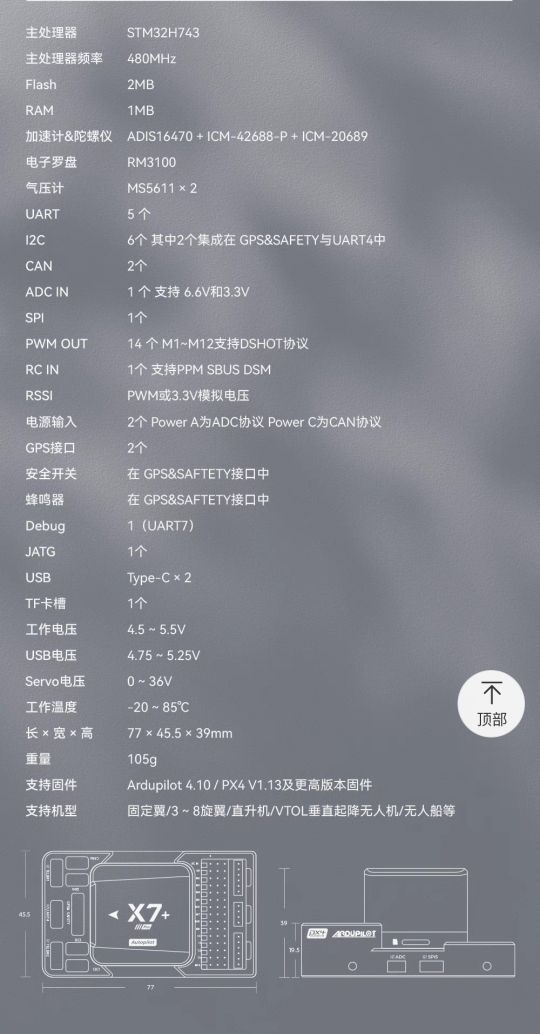
我们可以看到雷讯飞控。其实是一个以STM3H7芯片作为主处理器。然后附带一系列传感器,比如罗盘、气压计、加速度计。以及GPS外接等传感器。
做过单片机项目的可能有所了解,就是比如说32单片机可以通过引脚和接口,外接一个传感器,比如说超声波测距,然后我们再在单片机烧上对应的测距代码的,使超声波开始运作,飞控其实就是一个性能更高的单片机芯片,再加上一堆传感器,集装好成为一个飞控板。
那么就引出来一个问题,飞控肯定也需要一个东西,比如说代码去运行,但是对于飞控只有一个比较集成化的一个元件,都需要一个更加庞大的,一个项目代码去运行,也就引出我们的下一个话题:固件。
2.固件介绍
(1)前言
从我现阶段如果对固件下一个定义的好,我更愿意称他是一个项目代码。
这里面包括很多部分,以PX4为例的,可能对于各个传感器都会有一个对应的一个文件,里面存放该传感器的代码。同时。你在遥控器上使用你的模式甚至功能都会在它的项目里面有一个对应的一个模块,他也会有一个集成各种传感器数据的模块,去控制无人机。
(2)PX4和APM
目前来说,主流开源的飞控有两类:PX4和APM。从我自己的使用经验来看:对于你要使用多旋翼或者进行自主流程的话我推荐使用PX4固件。如果简单的固定翼飞行我推荐APM固件。
pixhawk、px4、APM、ArduPilot这四个的关系如何呢?
pixhawk是硬件平台,PX4是pixhawk的原生固件,专门为pixhawk开发。

APM(Ardupilot Mega)也是硬件,Ardupilot是APM的固件,所以称ArduPilot固件也叫APM。

![]()
(3)两者的联系
后来APM硬件性能不太够,所以APM固件也就针对兼容了Pixhawh硬件平台。所以在pixhawk硬件平台上可以运行PX4固件(原生固件),也可以运行APM固件。目前已经买不太到Ardupilot系列飞控,主流使用的还是pixhawk。如:雷迅公司开发的飞控,多是基于pixhawk平台。
以两者使用的地面站为例:QGC地面站是PX4固件的御用地面站,MP地面站是为APM固件开发。目前来说QGC和MP均已经适配PX4和APM固件,但是MP地面站刷写PX4固件的体验感还是很差。总的来说,无论你使用哪个固件,我都推荐QGC地面站,放下MP地面站的历史包袱。
(4)两者的特点
APM固件Ardupilo最初是基于arduino搞的,其程序比较混乱,零散。维护者多,代码风格不太统一,而且是单片机这种调用程序,不好入门。但是成熟稳定,支持硬件多。
PX4固件开发时间较晚,历史包袱少,使用更先进的架构。采用多任务,模块化设计。相对来说方便入门,代码风格比较统一。近几年PX4支持的硬件不断增多,更多厂商也基于pixhawk平台去开发,实际上PX4的成熟性和稳定性已经不属于APM,甚至略胜一筹。
(5)我使用过的飞控
应该说目前一些对自主智能系统研究比较深的学校,都有自己的飞控固件甚至适配的飞控。但是我们肯定是没有的,下面
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

