
- 1GO开发环境配置_go环境配置
- 2多元时间序列 | BP神经网络多变量时间序列预测(Matlab完整程序)_bp神经网络时间序列预测
- 3鸿蒙os后台运行,Day10 鸿蒙,Ability全家桶(二)如何后台运行任务
- 4【资料分享】Xilinx Zynq-7010/7020工业评估板规格书(双核ARM Cortex-A9 + FPGA,主频766MHz)_zynq7010和7020的区别
- 5AI 3.0》王飞跃教授推荐序——未来智能:人有人用,机有机用
- 6JavaAgent技术解析:深入理解和使用_java agent技术
- 7Python之Sklearn使用教程_python sklearn
- 8Task05基于鸢尾花数据集的贝叶斯分类算法实践_iris鸢尾花数据集贝叶斯分类
- 9CLRNet: Cross Layer Refinement Network for Lane Detection_clrnet复现 windows
- 10python tokenizer是什么_Python tokenizer包_程序模块 - PyPI - Python中文网
三维点云数据集—目标检测、分类、匹配_三维点云运动目标分类
赞
踩
三维点云数据集
做三维点云处理,常常因为数据烦恼,因此想把所用过下载过的数据集整理一下,若有不准确或者更多的资源,欢迎万能的网友们提点并告知(持续更新)。。。
1. The Stanford 3D Scanning Repository(斯坦福大学的3 d扫描存储库)
链接:http://graphics.stanford.edu/data/3Dscanrep/
这应该是做点云数据最初大家用最多的数据集,其中包含最开始做配准的Bunny、Happy Buddha、Dragon等模型。



2. Sydney Urban Objects Dataset(悉尼城市目标数据集)
链接:http://www.acfr.usyd.edu.au/papers/SydneyUrbanObjectsDataset.shtml
这个数据集包含用Velodyne HDL-64E LIDAR扫描的各种常见城市道路对象,收集于澳大利亚悉尼CBD。含有631个单独的扫描物体,包括车辆、行人、广告标志和树木等。可以用来测试匹配和分类算法。

3. ASL Datasets Repository
链接:https://projects.asl.ethz.ch/datasets/doku.php?id=home
这个数据集包含的数据比较多类,由Automonous Systems Lab提供的数据,一般数据集都有对应发表的论文成果。下边只列出一些下载过,用过的。
(1)IORS2018:目标检测和匹配

(2)IJRR2012:测试点云配准算法

(3)ISER2016:可用作点云配准(有源码)
源码链接:https://github.com/ethz-asl/robust_point_cloud_registration

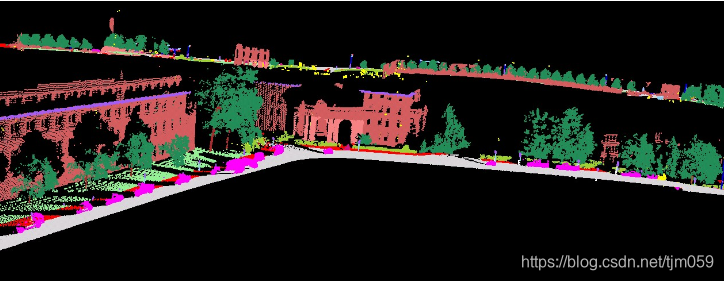
4. Large-Scale Point Cloud Classification Benchmark(大规模点云分类基准)
这个数据库是做大规模点云分类的,提供了一个大的自然场景标记的3D点云数据集,总计超过40亿点。涵盖了各种各样的城市场景:教堂、街道、铁路轨道、广场、村庄、足球场、城堡等等。



5. RGB-D Object Dataset(RGB-D对象数据集)
链接:http://rgbd-dataset.cs.washington.edu/index.html
RGB-D对象数据集是300个常见的家庭对象的大数据集。该数据集是使用Kinect风格的3D相机记录的,该相机以30Hz记录同步和对齐的640x480RGB和深度图像。对于每个物体,有3个视频序列,每个视频序列用安装在不同高度的照相机记录,以便从与地平线的不同角度观察物体。除了300个对象的孤立视图之外,RGB-D对象数据集还包括22个带有注释的自然场景视频序列,其中包含来自数据集的对象。这些场景覆盖了常见的室内环境,包括办公室工作区、会议室和厨房区域。


6. NYU-Depth(纽约大学深度数据集)
链接:https://cs.nyu.edu/~silberman/datasets/
这个数据集应该也是大家比较熟悉的,包括NYU-Depth V1数据集和NYU-Depth V2数据集,都是由来自各种室内场景的视频序列组成,这些视频序列由来自Microsoft Kinect的RGB和Depth摄像机记录。
NYU-Depth V1数据集包含有64种不同的室内场景、7种场景类型、108617无标记帧和2347密集标记帧以及1000多种标记类型。

NYU-Depth V2数据集包含了1449个密集标记的对齐RGB和深度图像对、来自3个城市的464个新场景,以及407024个新的无标记帧。

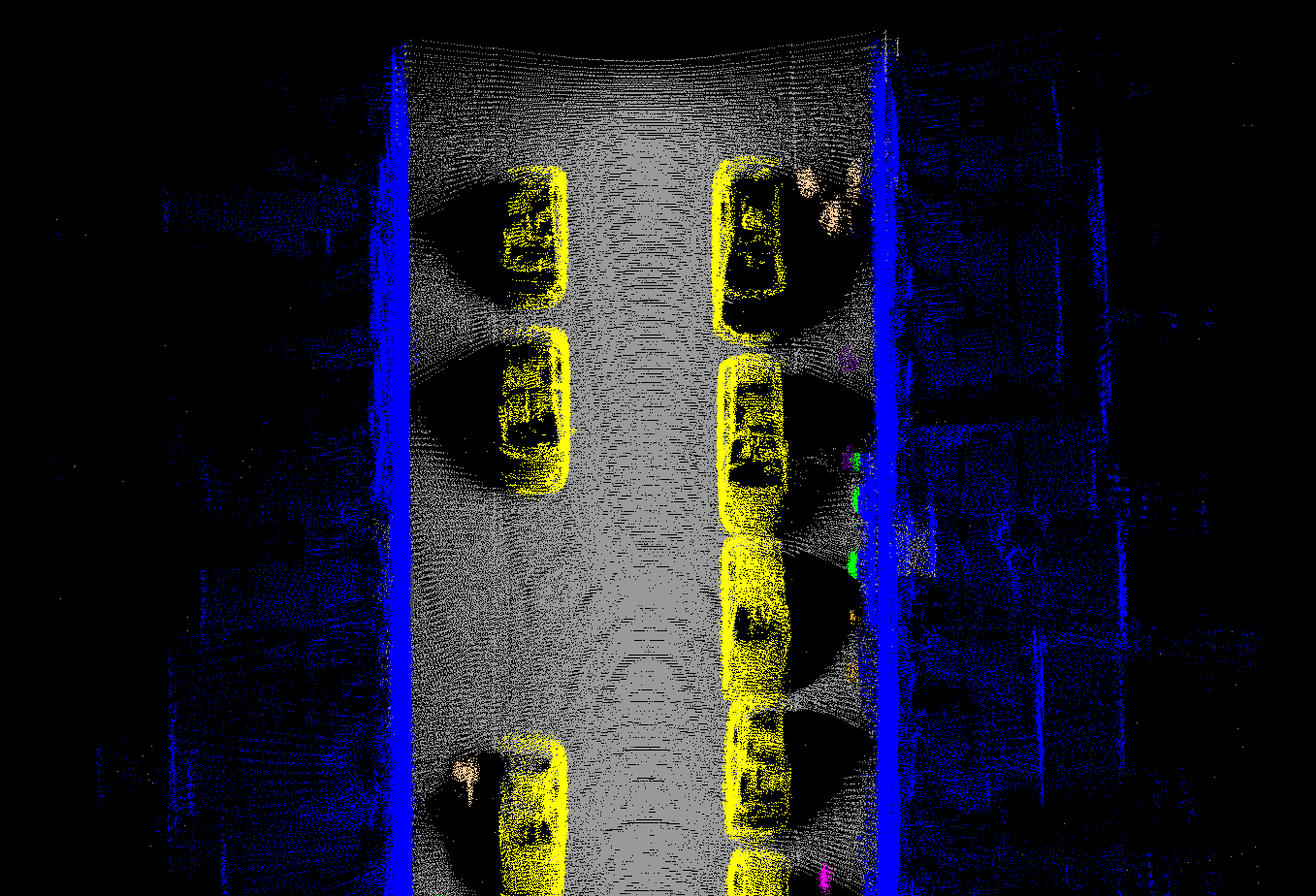
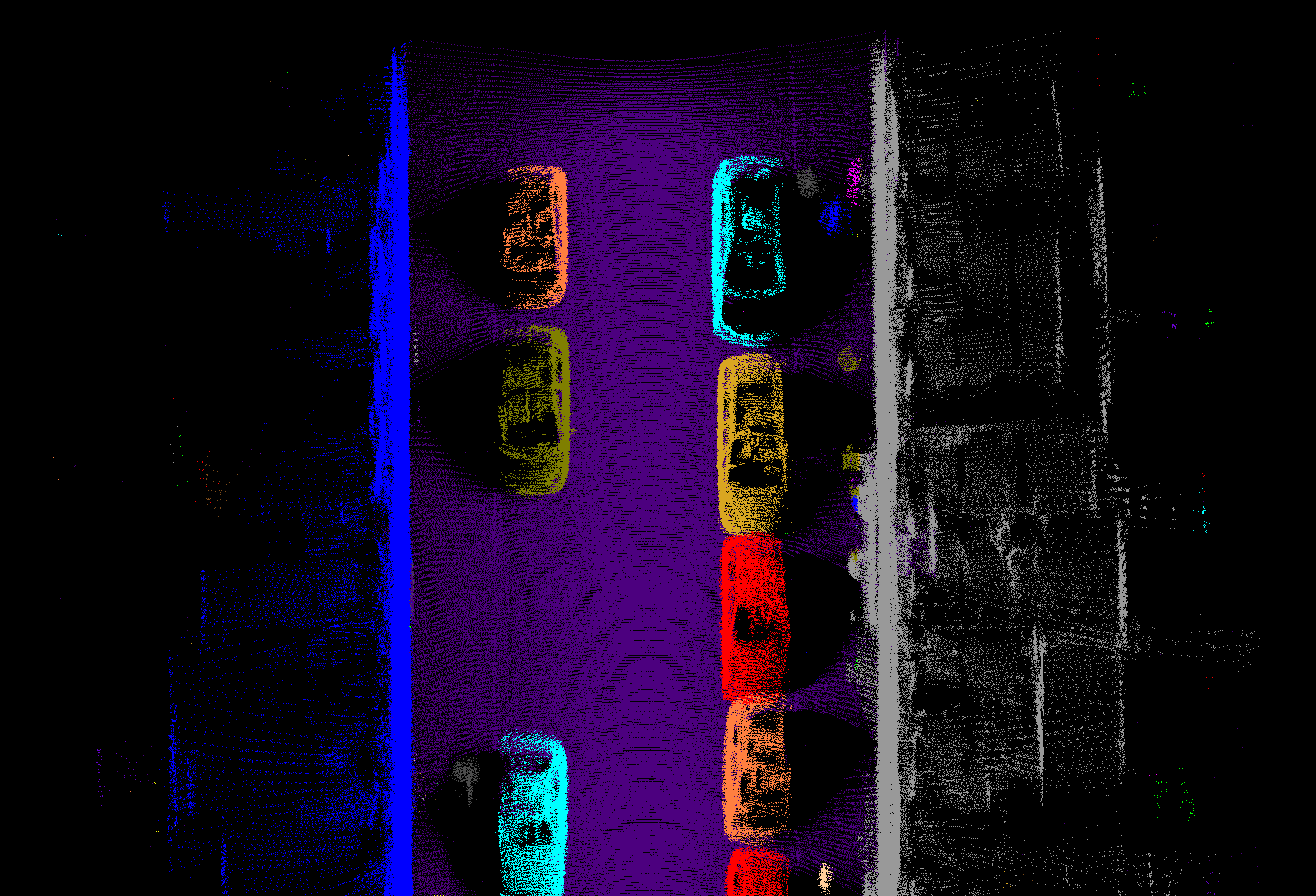
7. IQmulus & TerraMobilita Contest
链接:http://data.ign.fr/benchmarks/UrbanAnalysis/#
该数据库包含来自巴黎(法国)密集城市环境的3DMLS数据,由3亿点组成。在该数据库中,对整个3D点云进行分割和分类,即每个点包含一个标签和一个类。因此,对检测-分割-分类方法进行逐点评估成为可能。 这个数据库是在iQmulus和TerraMobilita项目的框架内产生的。它被法国国家制图局(IGN)开发的MLS系统“ Stereopolis II”收购。注释将由IGN的MATIS实验室手动辅助进行。

8.Oakland 3-D Point Cloud Dataset(奥克兰 )
链接:http://www.cs.cmu.edu/~vmr/datasets/oakland_3d/cvpr09/doc/
这个数据库的采集地点是在美国卡耐基梅隆大学周围,数据采集使用Navlab11,配备侧视SICK LMS激光扫描仪,用于推扫。 其中包含了完整数据集、测试集、训练集和验证集。
9.The KITTI Vision Benchmark Suite
链接:http://www.cvlibs.net/datasets/kitti/
这个数据集来自德国卡尔斯鲁厄理工学院的一个项目,其中包含了利用KIT的无人车平台采集的大量城市环境的点云数据集(KITTI),这个数据集不仅有雷达、图像、GPS、INS的数据,而且有经过人工标记的分割跟踪结果,可以用来客观的评价大范围三维建模和精细分类的效果和性能。
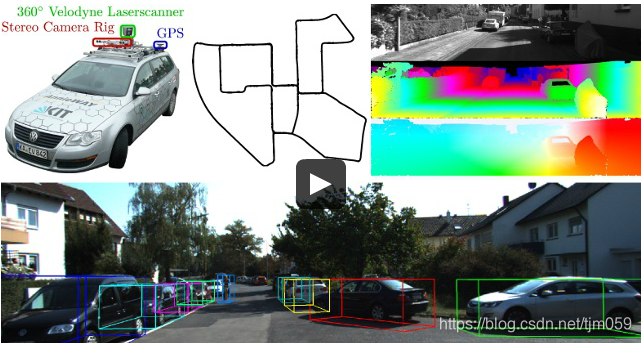
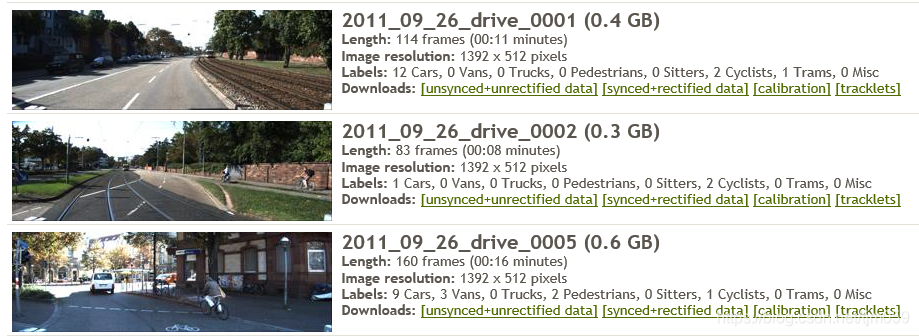
其中,该团队还介绍了一些相关的数据集,可以参考:
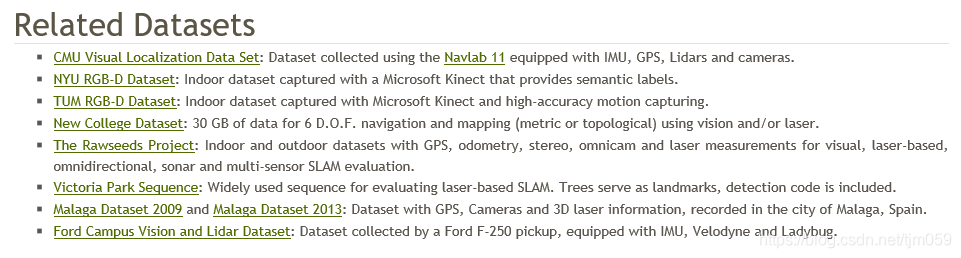
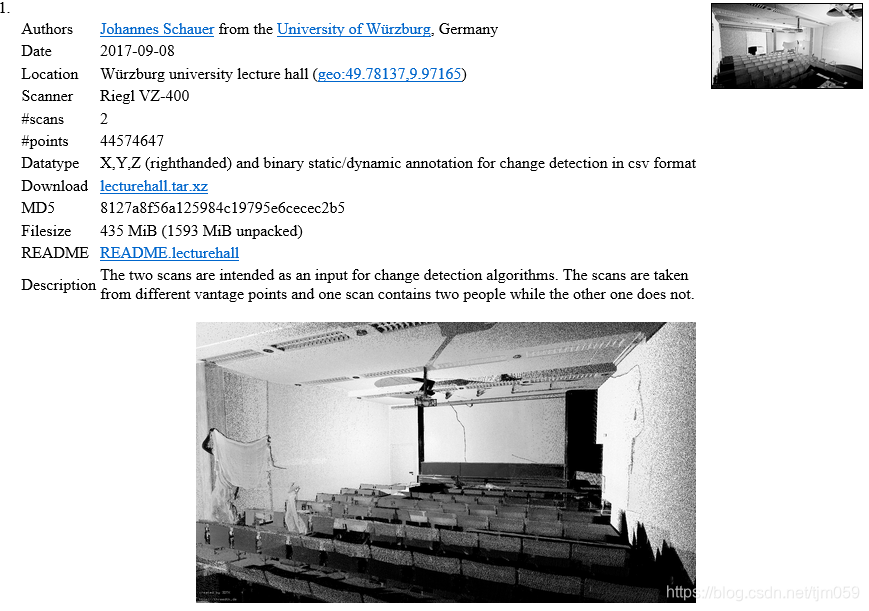
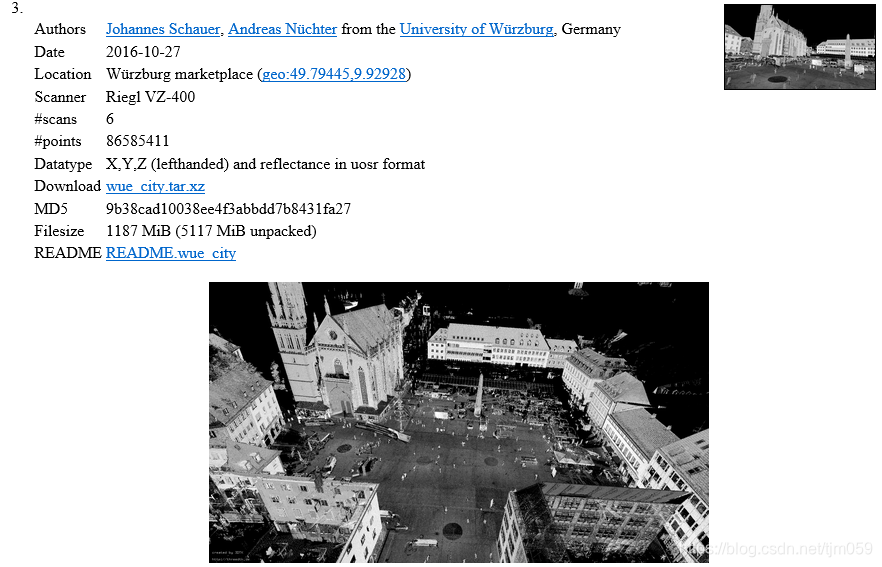
10.Robotic 3D Scan Repository
链接:http://kos.informatik.uni-osnabrueck.de/3Dscans/
这个数据集比较适合做SLAM研究,包含了大量的Riegl和Velodyne雷达数据。
11.待更新。。。。
注:欢迎广大网友分享数据及数据来源,博主也有一些比较散乱未经整理的点云数据(城市环境、建筑物等),欢迎资源共享!
(转载引用请注明)

