
热门标签
热门文章
- 1【毕业设计】LSTM预测算法(股票预测 天气预测 房价预测)_目前最新的lstm算法
- 2&5_循环神经网络 RNN_手动实现循环神经网络rnn
- 3基于Keras和LSTM单参数预测中兴通讯股票走势,结果震惊,含代码数据集_keras的lstm股票预测
- 4与 Apollo 共创生态: Apollo7周年大会带给我的启发和心得
- 5前端的安全性问题_前端安全性
- 6Python之密码设置_python一个合格的密码应该符合下面规则: 密码至少有8个字符。 密码包括
- 7MySQL8.0零基础入门_mysql8.0怎么使用
- 8Kafka问题_kafka request.timeout.ms
- 9BIM工程师简历范文
- 10数据挖掘——糖尿病预测_血糖预测数据集
当前位置: article > 正文
pycharm控制STM32F103ZET6拍照并上位机接收显示(OV7670、照相机、STM32、TFTLCD)_stm32f103zet6能进行图片传输吗
作者:你好赵伟 | 2024-05-05 16:57:30
赞
踩
stm32f103zet6能进行图片传输吗
准备工作
一、硬件及片上资源:
1,串口1(波特率:921600,PA9/PA10通过usb转ttl连接电脑,或者其他方法)上传图片数据至上位机
2,串口2(波特率:115200,PA2/PA3通过usb转ttl连接电脑,或者其他方法)控制拍照
3,2.8寸TFTLCD模块
4,按键KEY1(PE3)
5,SD卡
6,外部中断8(PA8,用于检测OV7670的帧信号)
7,定时器6(用于打印摄像头帧率)
8,带FIFO的OV7670摄像头模块
9、STM32F103ET6
10、USB转TTL模块两个
11、STLINK(其他下载器也可以:DSP、JTAG…)
二、软件:
1、pycharm
2、keil5-MDK
3、串口调试助手(XCOM)
三、连线:
在代码中都有。
最终效果
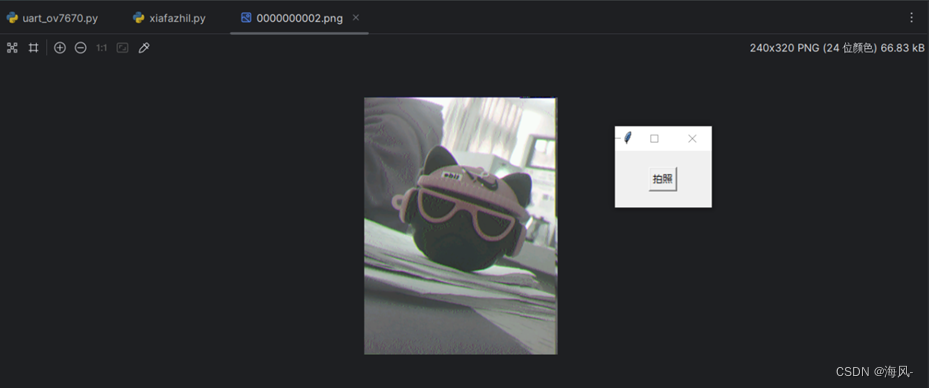
开机的时候先检测字库,然后检测SD卡根目录是否存在PHOTO文件夹,如果不存在则创建,如果创建失败,则报错(提示拍照功能不可用)。在找到SD卡的PHOTO文件夹后,开始初始化OV7670,在初始化成功之后,就一直在TFTLCD上显示OV7670拍到的内容。当上位机按下拍照时,进行拍照,此时DS1亮,照片通过串口发送至上位机,当DS1灭之后,拍照成功。(也可以自己改一改用板子的按键控制拍照)
1、实物图:
2、上位机效果:
一、下位机
代码过多过长这里只展示重要的:
1、主函数
int main(void)
{
u8 res;
u8 *pname; //带路径的文件名
u16 i;
delay_init(); //延时函数初始化
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置中断优先级分组为组2:2位抢占优先级,2位响应优先级
uart_init1(921600); //串口初始化为115200
uart_init2(115200);
usmart_dev.init(72); //初始化USMART
LED_Init(); //初始化与LED连接的硬件接口
KEY_Init(); //初始化按键
LCD_Init(); //初始化LCD
BEEP_Init(); //蜂鸣器初始化
W25QXX_Init(); //初始化W25Q128
my_mem_init(SRAMIN); //初始化内部内存池
exfuns_init(); //为fatfs相关变量申请内存
f_mount(fs[0],"0:",1); //挂载SD卡
f_mount(fs[1],"1:",1); //挂载FLASH.
EXTI8_Init(); //使能定时器捕获
EXTIX_Init();
POINT_COLOR=RED;
USART_SendData(USART2,0x31);
while(USART_GetFlagStatus(USART2,USART_FLAG_TC)!=SET);//等待发送结束
pname=mymalloc(SRAMIN,30); //为带路径的文件名分配30个字节的内存
while(pname==NULL) //内存分配出错
{
Show_Str(30,190,240,16,"内存分配失败!",16,0);
delay_ms(200);
LCD_Fill(30,190,240,146,WHITE);//清除显示
delay_ms(200);
}
while(OV7670_Init())//初始化OV7670
{
Show_Str(30,190,240,16,"OV7670 错误!",16,0);
delay_ms(2000);
LCD_Fill(30,190,239,206,WHITE);
delay_ms(2000);
}
delay_ms(10000);
Show_Str(30,190,200,16,"OV7670 normal",16,0);
delay_ms(14444);
delay_ms(14444);
OV7670_Light_Mode(0);//0
OV7670_Color_Saturation(0);
OV7670_Brightness(2);//0
OV7670_Contrast(2);//0
OV7670_Special_Effects(0);
OV7670_Window_Set(12,176,240,320); //设置窗口
OV7670_CS=0;
LCD_Clear(BLACK);
while(1)
{
if(Res_com2 == 0x31)
{
delay_ms(1800);
Res_com2 = 0;
//Res_com = 0;
LED1=0; //点亮DS1,提示正在拍照
res=bmp_encode(pname,(lcddev.width-240)/2,(lcddev.height-320)/2,240,320,0);
Show_Str(40,130,240,12,"picture_capture_finish!",12,0);
LED1=1;//关闭DS1
delay_ms(1800);//等待1.8秒钟
LCD_Clear(BLACK);
//jjj = 0;
}
else
delay_ms(5);
camera_refresh();//更新显示
i++;
if(i==10000)//DS0闪烁.
{
i=0;
LED0=!LED0;
}
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
2、OV7670初始化
u8 OV7670_Init(void)
{
u8 temp;
u16 i=0;
//设置IO
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB|RCC_APB2Periph_GPIOC|RCC_APB2Periph_GPIOD|RCC_APB2Periph_GPIOG|RCC_APB2Periph_AFIO, ENABLE); //使能相关端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8; //PA8 输入 上拉
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_SetBits(GPIOA,GPIO_Pin_8);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3|GPIO_Pin_4; // 端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_3|GPIO_Pin_4);
GPIO_InitStructure.GPIO_Pin = 0xff; //PC0~7 输入 上拉
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOD, &GPIO_InitStructure);
GPIO_SetBits(GPIOD,GPIO_Pin_6);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14|GPIO_Pin_15;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOG, &GPIO_InitStructure);
GPIO_SetBits(GPIOG,GPIO_Pin_14|GPIO_Pin_15);
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE); //SWD
SCCB_Init(); //初始化SCCB 的IO口
if(SCCB_WR_Reg(0x12,0x80))return 1; //复位SCCB
delay_ms(50);
//读取产品型号
temp=SCCB_RD_Reg(0x0b);
if(temp!=0x73)return 2;
temp=SCCB_RD_Reg(0x0a);
if(temp!=0x76)return 2;
//初始化序列
for(i=0;i<sizeof(ov7670_init_reg_tbl)/sizeof(ov7670_init_reg_tbl[0]);i++)
{
SCCB_WR_Reg(ov7670_init_reg_tbl[i][0],ov7670_init_reg_tbl[i][1]);
}
return 0x00; //ok
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
二、上位机
1、控制拍照
# 和另一个.py文件一起运行,点击可视化界面的拍照即可拍照
import serial
import time
import tkinter as tk
def send_command():
command_to_send = b'\x31\r\n'
ser.write(command_to_send)
# You can add any additional actions or updates here
# Create the serial connection
ser = serial.Serial('COM13', 115200)
time.sleep(2)
# Create the Tkinter window
window = tk.Tk()
window.title("Serial control take photos")
# Create a button to send the command
send_button = tk.Button(window, text="拍照", command=send_command)
send_button.pack(pady=20)
# Run the Tkinter main loop
window.mainloop()
# Close the serial connection when the window is closed
ser.close()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
2、接收图片数据
# 用波特率为921600的串口接收下位机上传的图片数据,接受的图片会有一点色彩问题,怀疑是传输出现的问题,用高斯滤波就可以基本滤除。
# 注意要连接好串口,板子上好电,这个代码才能运行不然报错找不到串口
import serial
import struct
import numpy as np
from PIL import Image
import matplotlib.pyplot as plt
import cv2
import os
ser = serial.Serial('COM5', 921600)
# 初始化一个空的二维数组,用于存储接收到的数据
received_data = np.zeros((320, 240), dtype=np.uint16)
# 初始化图像计数器
image_counter = 1
# 全局变量,保存当前索引
image_index = 0
# 设置图像保存目录
save_dir = "pic_receive"
# 如果目录不存在,则创建目录
if not os.path.exists(save_dir):
os.makedirs(save_dir)
while True:
# 初始化索引和计数器
received_index = 0
row = 0
col = 0
# 接收数据直到收到足够的数据
print("可以发送数据")
while received_index < 240 * 320:
# 读取两个字节的数据
data = ser.read(2)
# 解析uint16数据
color_value = struct.unpack('>H', data)[0] # '>H'表示大端字节序的uint16
# 将数据存入二维数组
received_data[row, col] = color_value
col += 1
received_index += 1
# 判断是否接收完一行数据
if col >= 240:
col = 0
row += 1
# 如果接收完一帧数据,进行解析和显示
if row >= 320:
# 解析RGB565格式的数据为RGB888格式
# 不知道什么原因发上来列发生错误,进行重组
selected_columns1 = received_data[:, 0:47]
selected_columns2 = received_data[:, 47:240]
merged_array = np.concatenate((selected_columns2, selected_columns1), axis=1)
rgb888_data = []
for i in range(320):
for j in range(240):
color_value = merged_array[i, j]
r = (color_value & 0xF800) >> 8
g = (color_value & 0x07E0) >> 3
b = (color_value & 0x001F) << 3
rgb888_data.append((r, g, b))
# 创建RGB888格式的图像对象
image = Image.new('RGB', (240, 320))
# 将RGB888格式的数据填充到图像对象中
image.putdata(rgb888_data)
# 保存图像到文件夹
image_filename = os.path.join(save_dir, f"{image_counter:010d}.png")
image.save(image_filename)
# 增加图像计数器
image_counter += 1
# 显示图像
#plt.imshow(image)
#plt.show()
# 重置二维数组,准备接收下一帧数据
received_data = np.zeros((320, 240), dtype=np.uint16)
row = 0
col = 0
# 清空串口接收缓冲区
ser.flushInput()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
三、资源获取
我用夸克网盘分享了「照相机+双串口+上位机接收并显示.rar」,点击链接即可保存。打开「夸克APP」,无需下载在线播放视频,畅享原画5倍速,支持电视投屏。
链接:https://pan.quark.cn/s/125911f5def1
提取码:Za2E
推荐阅读
相关标签

