
- 1launch文件_launcha文件都是arg name
- 2前端接收后端传递字符串数组时的坑_后端定义了一个集合 前端传字符串
- 3计算机毕业设计(附源码)python租车信息管理系统_python车辆出租管理系统
- 4idea2020进行git操作特别慢、卡顿的问题解决_为什么idea中使用git解决冲突特别慢
- 5[git]Window下git生成SSH Key和TortoiseGit添加putty秘钥免密配置_git生成ssh秘钥 window
- 6微软打破Decoder-Only架构!大幅降低GPU内存需求,网友:把Llama3 70B弄20GB GPU上运行...
- 7QT串口助手开发1之绘制界面_qt串口数据接收及图形绘制
- 8图数据库-1-【Neo4j】的安装及使用_please choose path where you want to store applica
- 9Android语音识别教程:实现语音识别功能_google 语音识别 adnroid
- 10老母鸡教学 在本地Windows 11电脑上运行本地大模型【千问】
在视觉提示中加入「标记」,微软等让GPT-4V看的更准、分的更细_gpt4v csdn
赞
踩
最近一段时间,我们见证了大型语言模型(LLM)的显著进步。特别是,生成式预训练 Transformer 或 GPT 的发布引领了业界和学术界的多项突破。自 GPT-4 发布以来,大型多模态模型 (LMM) 引起了研究界越来越多的兴趣,许多工作致力于构建多模态 GPT-4。
近日,GPT-4V (ision) 由于出色的多模态感知和推理能力得到了大家格外的关注。然而,尽管 GPT-4V 具有前所未有的视觉语言理解能力,但其细粒度 visual grounding(输入是图片和对应的物体描述,输出是描述物体的 box)能力相对较弱,或者尚未发挥出来。
举例来说,当用户询问下图中「放置在右边笔记本电脑的左边是什么物体?」GPT-4V 给出了马克杯这个错误的答案。当用户接着询问,「想找一个靠窗的座位,我可以坐在哪里?」GPT-4V 同样回答不正确。
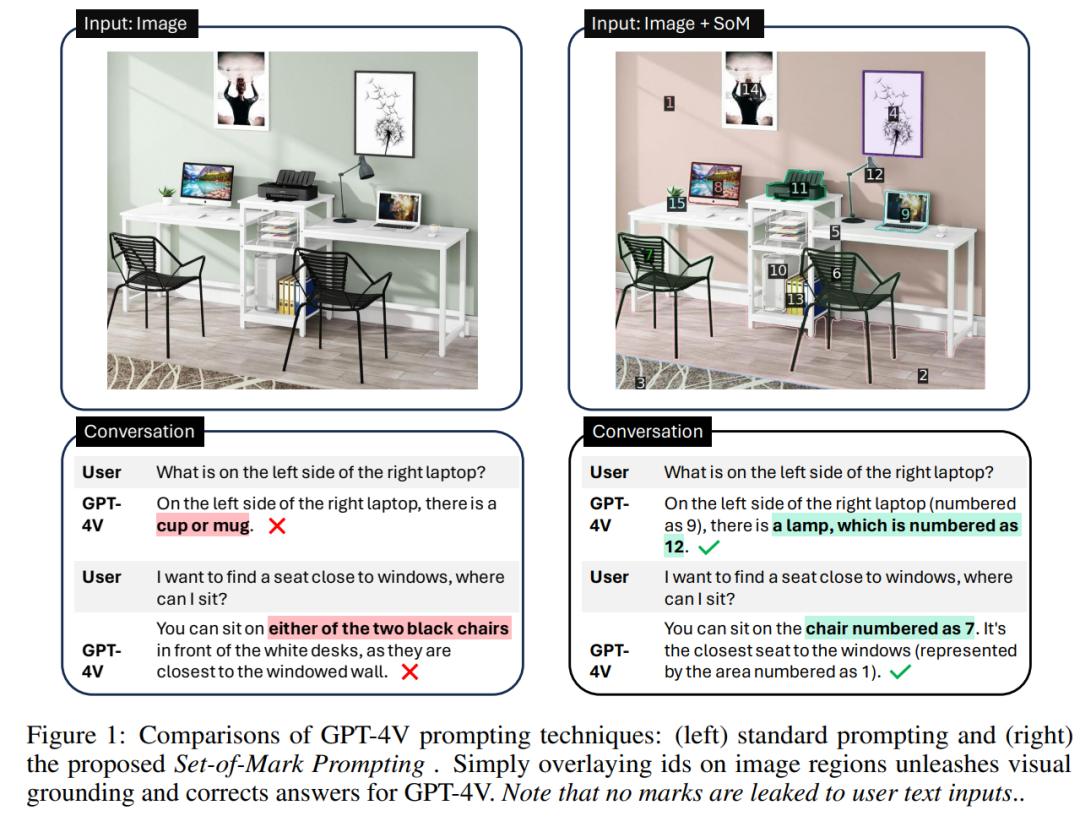
在意识到上述问题后,来自微软、香港科技大学等机构的研究者提出了一种新的视觉 prompt 方法 Set-of-Mark(SoM),来解决 GPT-4V 在细粒度视觉任务上的问题。
-
论文地址:https://arxiv.org/pdf/2310.11441.pdf
-
论文主页:https://som-gpt4v.github.io/
如图 1(右)所示,SoM 采用交互式分割模型(例如 SAM)将图像划分为不同粒度级别的区域,并在这些区域上添加一组标记(mark),例如字母数字、掩码(mask)、框(box)。使用添加标记的图像作为输入,以解决上述问题。
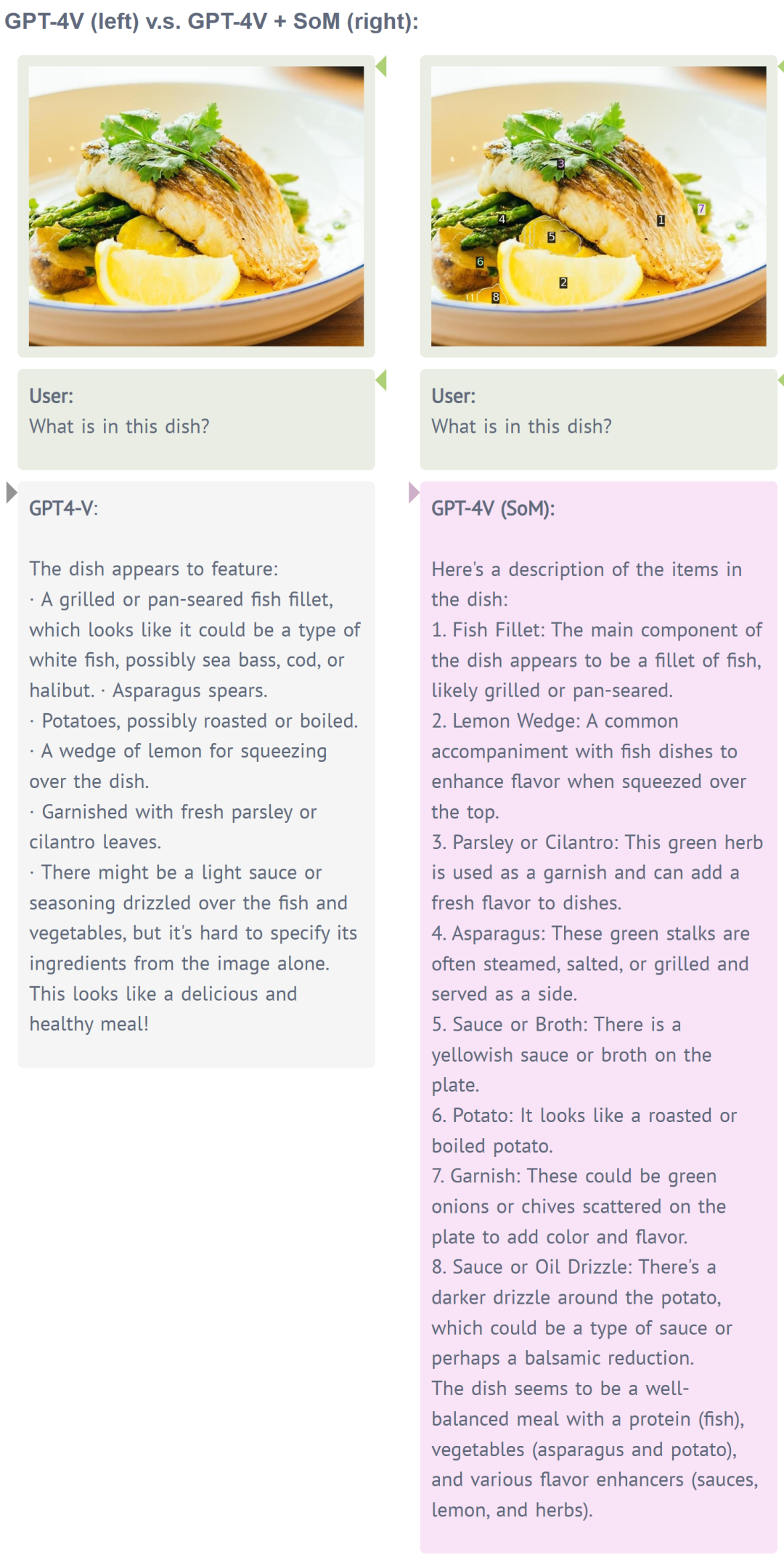
我们先来看下效果,左为 GPT-4V,右为 GPT-4V+SoM,很明显后者分类更细致、准确。

下图示例依然如此,GPT-4V+SoM 效果更明显。
此外,对于这项研究,有人问道:「SoM 是手动(人工输入)还是自动的?」
论文一作 Jianwei Yang 表示,SoM 是自动或半自动的。他们编译了很多自己构建自己的分割工具,比如 SEEM、Semantic-SAM 和 SAM,用来帮助用户自动为图像分割区域。同时用户也可以自己选择区域。

用于视觉的 SoM prompt
使用 SoM prompt GPT-4V 的独特优点是它可以产生文本之外的输出。由于每个标记都与掩码表征的图像区域特定关联,因此可以追溯文本输出中任何提到的标记的掩码。
生成成对文本和掩码的能力使 SoM 能够 prompt GPT-4V 来生成视觉关联的文本,更重要的是支持各种细粒度视觉任务,这对普通的 GPT-4V 模型来说是一个挑战。
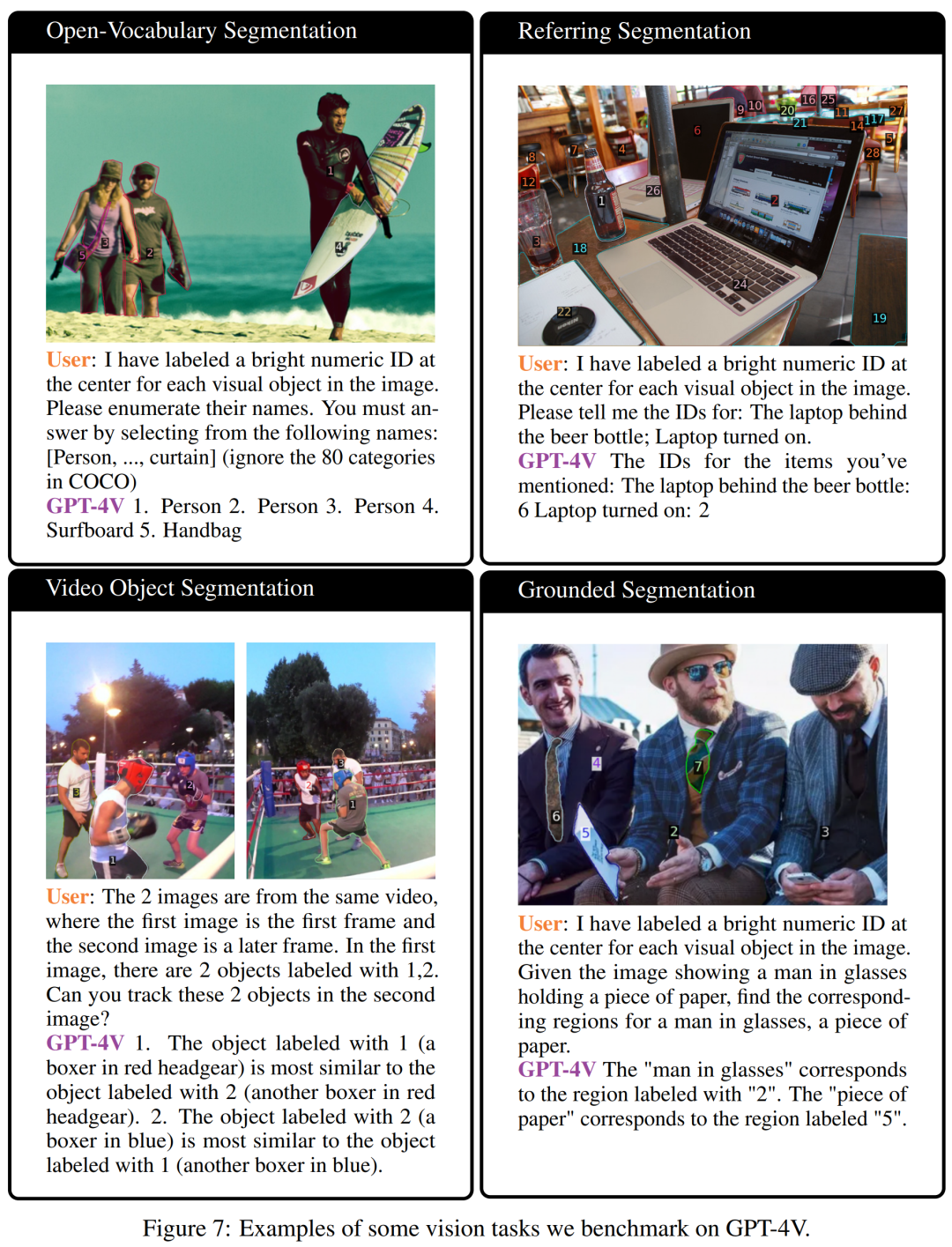
通过简单的 prompt 工程,SoM 可以让 GPT-4V 广泛地用于多种视觉任务,例如:
-
开放词汇图像分割:该研究要求 GPT-4V 详尽地给出所有标记区域的类别以及从预定池中选择的类别。
-
参考分割:给定一个参考表达式,GPT-4V 的任务是从图像分区工具箱生成的候选区域中选择最匹配的区域。
-
短语关联(Phrase Grounding):与参考分割略有不同,短语关联使用由多个名词短语组成的完整句子。该研究要求 GPT-4V 为所有标记的短语分配相应的区域。
-
视频对象分割:以两个图像作为输入。第一个图像是查询图像,其中包含第二个图像中需要识别的一些对象。鉴于 GPT-4V 支持多个图像作为输入,因此 SoM 也可以应用于视频中跨帧的关联视觉对象。
实验及结果
研究者使用「分而治之」(divide-and-conquer)的策略来运行实验和评估。对于每个实例,他们使用新的聊天窗口,这样一来,评估期间就不会出现上下文泄露了。
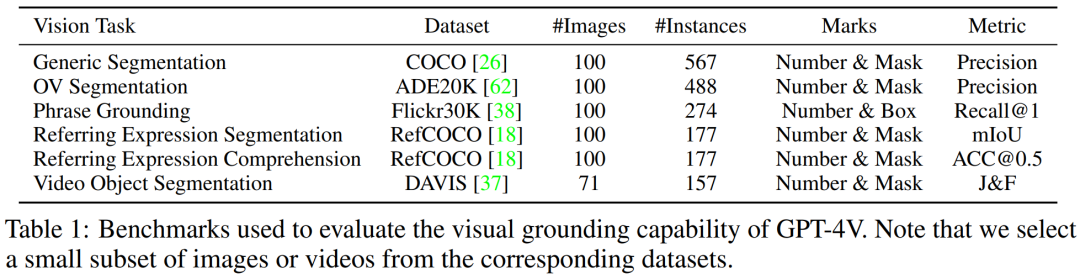
具体来讲,研究者从每个数据集中选择了小规模的验证数据子集。对于数据集中的每个图像,他们在使用图像分割工具箱提取的区域上覆盖了一组标记。同时基于具体的任务,研究者利用不同的分割工具来提出区域。
下表 1 列出了每个任务的设置细节。
研究者将其方法与以下模型进行比较:
-
预测坐标的 GPT-4V 基线模型
-
SOTA 专用模型
-
开源 LMM
定量结果
详细的实验结果如下表 2 所示。
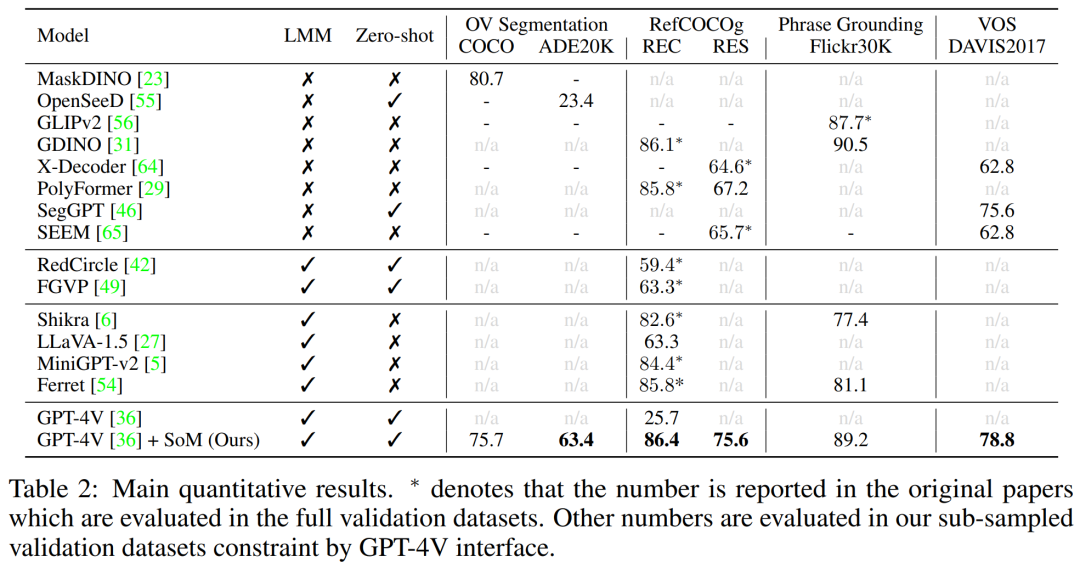
首先是图像分割任务。研究者将 GPT-4V + SoM 与 COCO Panoptic 分割数据集上的强大分割模型 MaskDINO、ADE20K Panoptic 分割数据集上的模型 OpenSeeD 进行了比较。
结果显示,GPT-4V + SoM 的零样本性能接近微调后的 MaskDINO,并大幅优于 OpenSeeD。GPT-4V 在 COCO 和 ADE20K 上的相似性能表现出其对广泛视觉和语义域任务的强大泛化能力。
然后是参考(referrring)任务,研究者评估了 RefCOCOg 数据集上的模型 RES 和 REC。他们使用 MaskDINO 来提出掩码,并在图像上覆盖上掩码和数字。同时使用 mIoU 作为评估指标,并与 SOTA 专用模型 PolyFormer 和 SEEM 进行比较。
结果显示,GPT-4V+SoM 击败了 Grounding DINO、Polyformer 等专用模型以及 Shikra、LLaVA-1.5、MiniGPT-v2 和 Ferret 等最近的开源 LMM。
接着是 Flickr30K 上的短语关联任务,研究者使用 Grounding DINO 为每个图像生成框建议。GPT-4V+SoM 实现了比 GLIPv2 和 Grounding DINO 更强的零样本性能。
最后研究者在 DAVIS2017 数据集上评估了视频分割任务。GPT-4V+SoM 实现了优于其他专用视觉模型的最佳追踪性能(78.8 J&F)。
消融研究
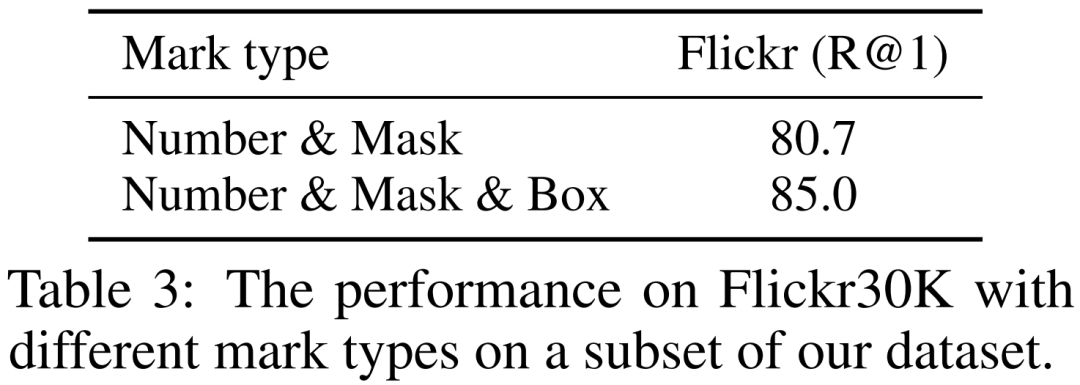
研究者探讨了标记类型如何影响 Flickr30k 数据集上短语关联任务的最终性能,并比较了两种类型的标记。第一种是数字和掩码,第二种是数字、掩码和框。
结果如下表 3 所示,添加额外的框可以显著提升性能。
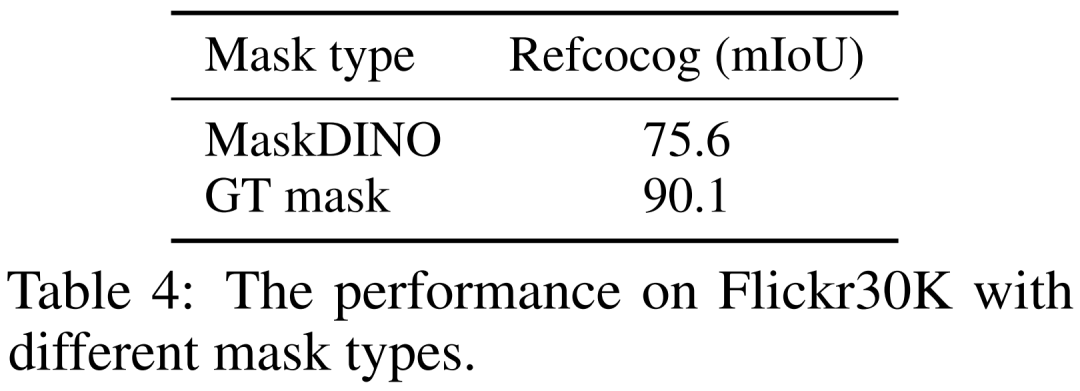
此外研究者探究了当生成带有真值注释的标记时,GPT-4V 如何表现。他们选择在 RefCOCOg 验证集中用真值掩码替换预测到的分割掩码。这意味着 GPT-4V 只需要从注释短语区域选择一个即可。如预期一样,参考分割的性能可以得到进一步提升,尤其是当分割模型有一些缺失的区域。
结果如下表 4 所示,在 SoM 中使用真值掩码可以将 RefCOCOg 上的性能提升 14.5%(mIoU)。
更多技术细节和实验结果参阅原论文。

