
热门标签
热门文章
- 1java.sql.SQLSyntaxErrorException: Unknown column ‘id‘ in ‘field list‘_unknown column 'id' in 'field list
- 2Android ADB工具使用
- 3mySQL创建表_mysql创建一个姓名-密码的表
- 4LaTex的下载与安装超详细windows版_latex下载
- 5呼叫中心系统对接web业务系统实现网页通话能力_web端如何实现打电话功能
- 6uniapp 动态导航栏 原生导航栏 原生导航栏样式动态变化_uniapp tabbar 在設置"navigationstyle": "custom" 顯示
- 7机器人核心期刊及会议_机器人工程看什么英文期刊
- 8AWS re_Invent 2022 - Keynote with Ruba Borno
- 9华为:人工智能HCIA-AI初级笔记:python基础
- 10实现create-react-app react-scripts中的 start 和 build 命令_react-scripts start
当前位置: article > 正文
PX4使用yolo仿真环境搭建
作者:你好赵伟 | 2024-05-22 10:18:11
赞
踩
PX4使用yolo仿真环境搭建
前言
ubuntu20.04
PX4 1.13.3
已配置好PX4 ROS gazebo环境
一、修改机架sdf文件
将双目相机加到仿真的iris机架上
修改下图文件
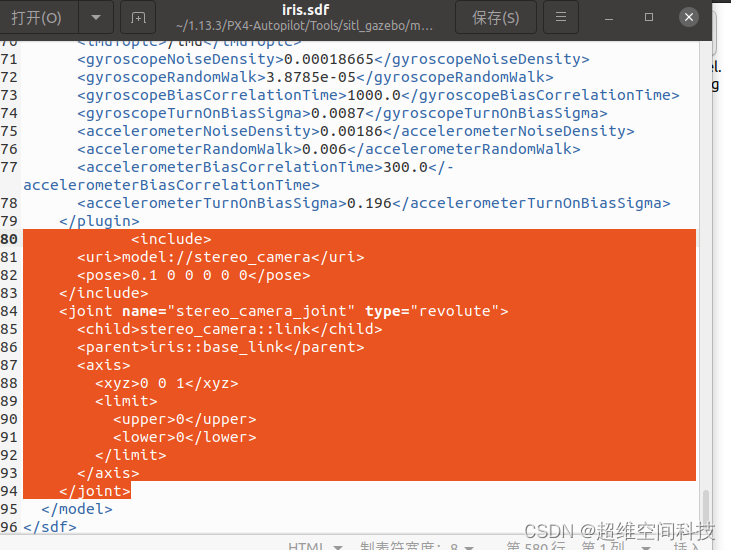
添加如下:
<include>
<uri>model://stereo_camera</uri>
<pose>0.1 0 0 0 0 0</pose>
</include>
<joint name="stereo_camera_joint" type="revolute">
<child>stereo_camera::link</child>
<parent>iris::base_link</parent>
<axis>
<xyz>0 0 1</xyz>
<limit>
<upper>0</upper>
<lower>0</lower>
</limit>
</axis>
</joint>
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
然后在~/1.13.3/PX4-Autopilot执行
make px4_sitl_default gazebo
- 1
编译完运行
roslaunch px4 mavros_posix_sitl.launch
- 1
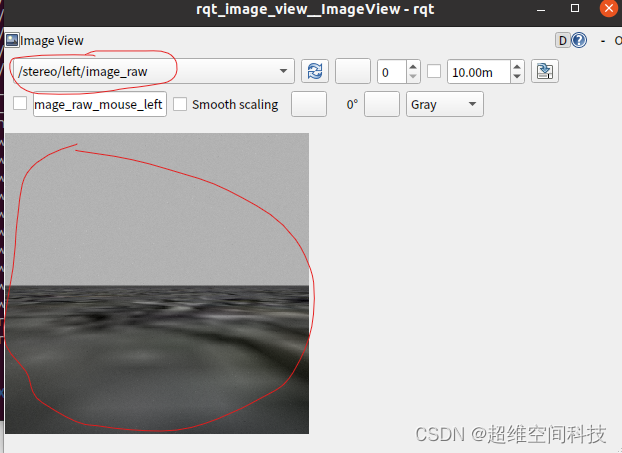
然后运行
rqt_image_view
- 1
选择下图话题,可以看到gazebo的环境,说明添加正常
二、安装yolo
cd catkin_workspace/src
git clone --recursive git@github.com:leggedrobotics/darknet_ros.git
- 1
- 2
下载完后
cd ~/catkin_workspace/src/darknet_ros/darknet
make
- 1
- 2
然后
cd ~/catkin_workspace
catkin_make -DCMAKE_BUILD_TYPE=Release
- 1
- 2
三、运行
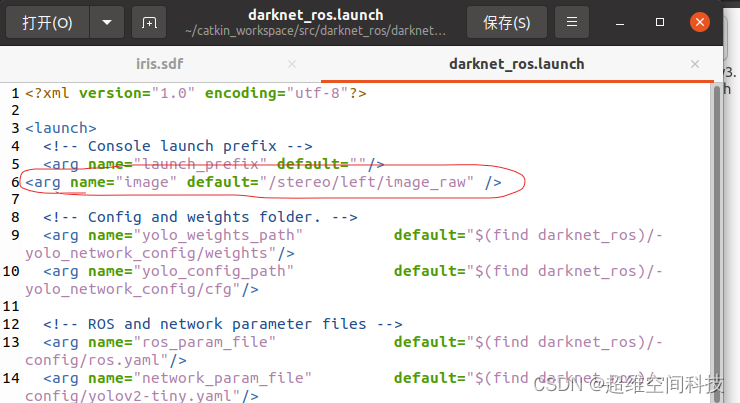
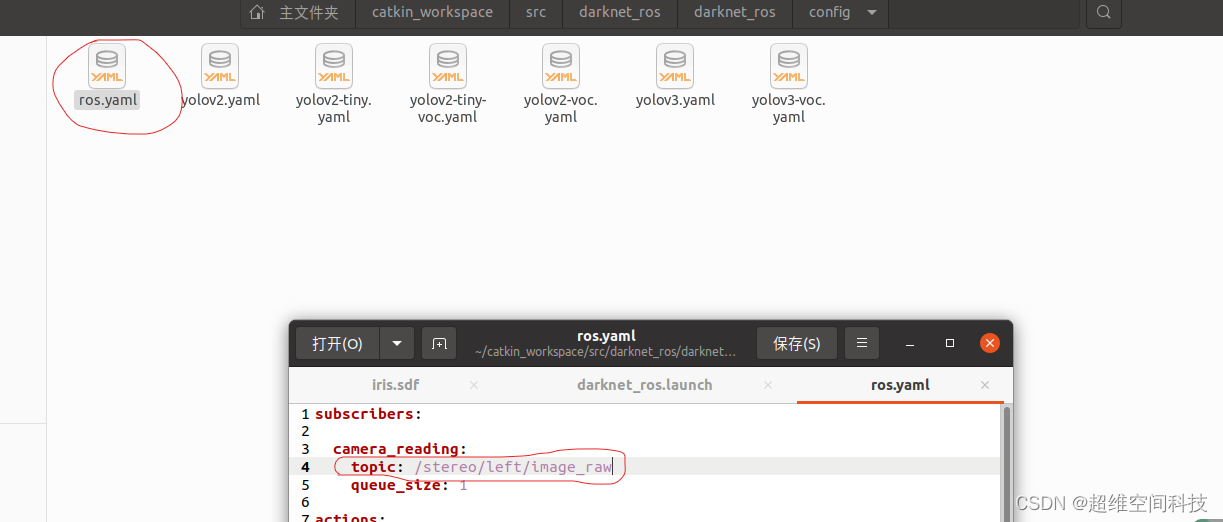
修改

<arg name="image" default="/stereo/left/image_raw" />
- 1
修改
topic: /stereo/left/image_raw
- 1
然后先运行
roslaunch px4 mavros_posix_sitl.launch
- 1
再运行
roslaunch darknet_ros darknet_ros.launch
- 1
出现下面的页面表示运行正常

声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/你好赵伟/article/detail/607758
推荐阅读
相关标签

