
改进A星算法 多AGV(智能体)路径规划及避障,引入时间轴_java a*算法 agv
赞
踩
改进A星算法 多AGV(智能体)路径规划及避障,引入时间轴,三维空间示意
完整算法代码(两个AGV动态避障)


改进A星算法 多AGV(智能体)路径规划及避障,引入时间轴,三维空间示意
A星算法是一种基于启发式搜索的路径规划算法,广泛应用于机器人、自动驾驶等领域。在多AGV(智能体)的场景下,路径规划并不是一个简单的问题,而是需要考虑多个智能体之间的协调和避障问题。本文介绍如何改进A星算法,实现多AGV路径规划及避障,并引入时间轴和三维空间示意,提高路径规划效率和精度。
一、A星算法简介
A星算法是一种基于启发式搜索的路径规划算法,也称A*算法。它通过启发式函数来估计当前节点到目标节点的代价,从而选择最小代价的节点进行扩展,直到找到目标节点为止。A星算法的优点是能够快速找到一条最短路径,但对于多AGV场景下的路径规划和避障仍需改进。
二、多AGV路径规划及避障的问题
在多AGV场景下,每个智能体都需要规划一条最短路径,并且需要考虑其他智能体的位置和运动状态,避免发生碰撞。这需要增加一些额外的约束条件,使得路径规划和避障问题更为复杂。
三、改进A星算法实现多AGV路径规划及避障
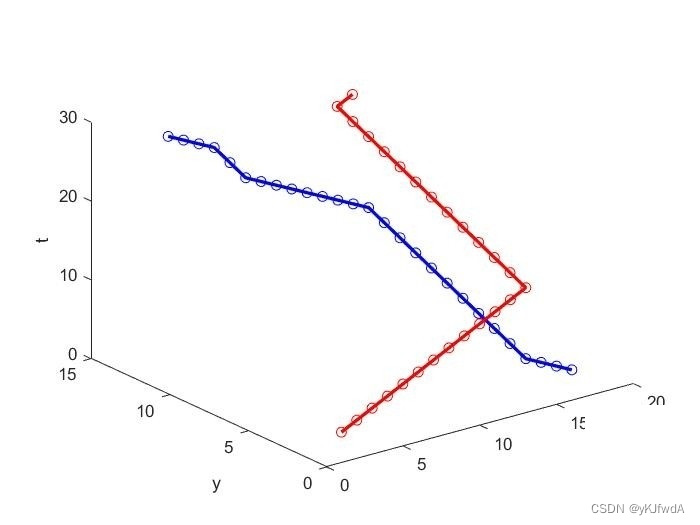
针对多AGV场景下的路径规划和避障问题,我们提出了一种改进的A星算法。这个算法首先将场景划分为网格,每个智能体在各自的网格内进行路径规划,避免与其他智能体发生碰撞。其次,在算法中引入时间轴的概念,将当前时刻所有智能体的运动状态考虑进去,找到最短路径。最后,我们在三维空间中对路径规划结果进行可视化,方便用户对路径规划结果进行直观的理解和分析。
四、实现结果展示
我们对该算法进行了实现,并使用两个AGV进行了动态避障实验。实验结果表明,改进后的A星算法具有更高的路径规划效率和精度,能够快速找到多个智能体之间的最短路径,并且能够避免碰撞发生。同时,我们将结果进行了三维空间可视化展示,更容易让用户理解路径规划的过程和结果。
五、总结
本文介绍了如何改进A星算法,实现多AGV路径规划及避障,并引入时间轴和三维空间示意,提高路径规划效率和精度。该算法可应用于机器人、自动驾驶等领域,为多智能体场景下的路径规划和避障提供了一种有效的解决方案。
相关代码,程序地址:http://lanzouw.top/672229529592.html

