
- 1直律云所——让法律变得简单_让法律更简单
- 2Redis迁移-RedisShake工具_redis-shake
- 3终于有人总结了大模型技术!(非常详细)零基础入门到精通,收藏这一篇就够了_大模型入门
- 4图书管理系统数据库设计_图书管理系统的数据库设计
- 5全网最全的网络安全学习(自学)路线!整理了一个月时间!!_网安学习资料
- 6mysql中hive库的编码_[转载]Hive设置MySQL元数据编码问题
- 7Django计算机毕业设计企业固定资产信息管理系统python(源码程序+lw+远程部署)_python固定资产管理程序源代码
- 8Java数据结构:双向链表的实现_双向链表java实现
- 9【华为OD机考 统一考试机试C卷】CPU算力分配(Java题解)_cpu算力分配算法题
- 10Spring && SpringMVC && Mybatis_java速成
基于A*与DWA算法融合的动态路径规划:实现静态及动态避障碍,动态路径规划算法融合A星与DWA:实现静态与动态避障,提升路径规划效果
赞
踩
基于A星与DWA算法融合的动态路径规划,可实现静态避障碍及动态避障
ID:924745653542898
万物不及DNZ
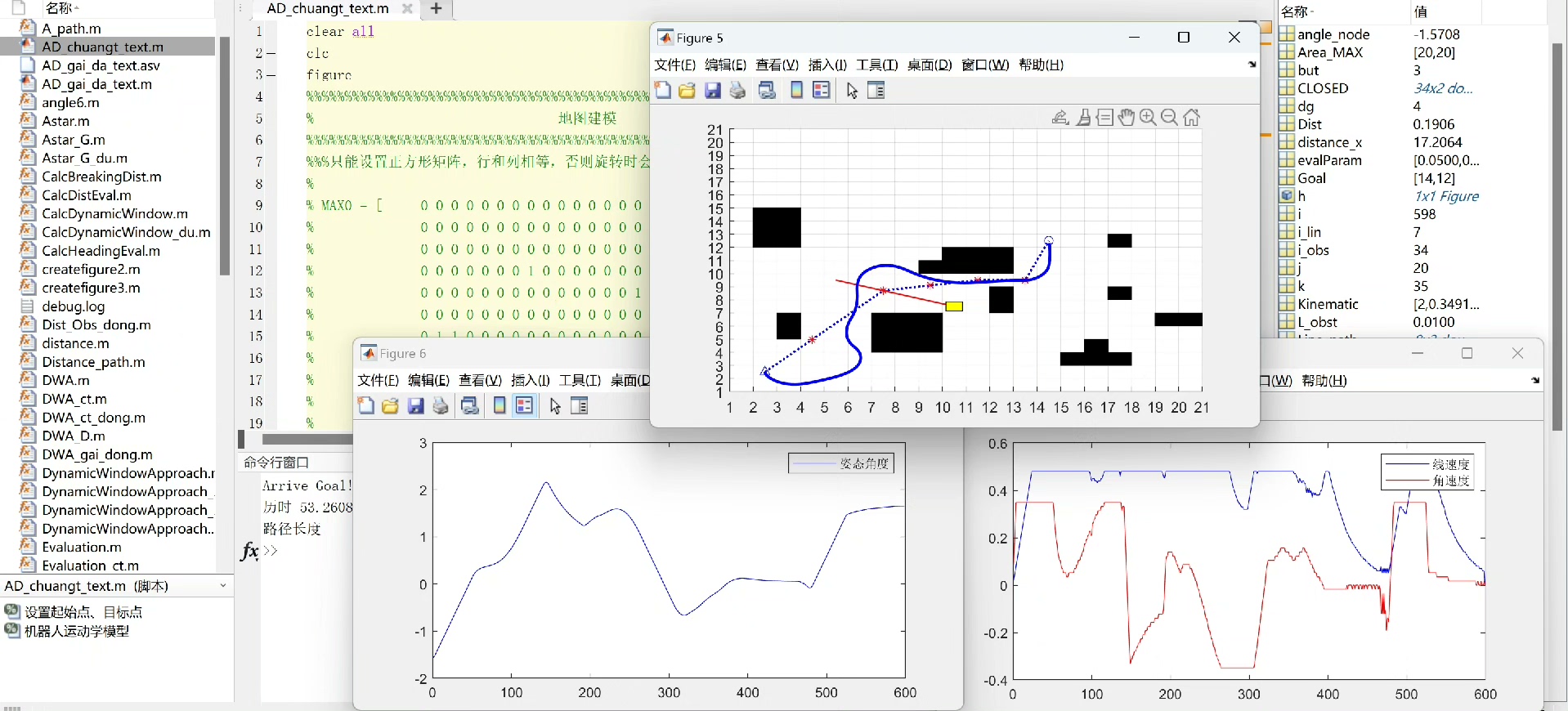
基于A*与DWA算法融合的动态路径规划,是一种有效实现机器人在复杂环境中静态避障碍和动态避障的方法。在现实世界中,机器人常常需要在未知的环境中自主探索并完成任务。然而,这些环境往往存在各种障碍物,包括静态的墙壁、家具等,以及动态的移动物体。因此,机器人需要能够快速、准确地规划并执行路径,以避开这些障碍物,达到目标位置。
在传统的路径规划中,A算法是一种经典的静态路径规划算法,通过在图上搜索最短路径,考虑到各个节点的代价和启发式函数,能够高效地找到起点到目标点的最优路径。然而,A算法只适用于静态环境,对于动态环境下的路径规划并不理想。因此,我们需要结合另一种算法来处理动态障碍物的情况。
DWA(Dynamic Window Approach)算法是一种适用于动态环境的路径规划算法。它通过模拟机器人行驶一段时间内的各种速度和方向组合,并根据每个组合的代价函数来评估路径的可行性。DWA算法通过在速度-方向空间中搜索最佳路径,能够快速响应动态障碍物,保证机器人的运动安全性和效率。
为了充分利用A和DWA算法的优点,我们将二者进行融合,得到一种基于A与DWA算法融合的动态路径规划方法。具体步骤如下:首先,我们使用A*算法在静态地图中搜索最短路径,考虑到各个节点的代价和启发式函数,得到一个初始路径。然后,我们使用DWA算法对初始路径进行优化,考虑机器人当前的动态环境,包括动态障碍物的位置和速度。通过在速度-方向空间中搜索最佳路径,我们能够得到一个更加安全、高效的动态路径。最后,我们使用动态路径控制算法,如PID控制,来引导机器人按照规划的动态路径进行运动。
通过基于A与DWA算法融合的动态路径规划,机器人能够在复杂环境中快速、准确地规划并执行路径。该方法不仅能够避开静态障碍物,还能够响应动态障碍物的变化,保证机器人的安全性和效率。在实际应用中,基于A与DWA算法融合的动态路径规划已经取得了一定的成果,比如在无人驾驶领域中得到了广泛的应用。
总之,基于A与DWA算法融合的动态路径规划是一种解决机器人在复杂环境中静态避障碍和动态避障的有效方法。通过结合A算法和DWA算法的优点,我们能够得到更加安全、高效的动态路径。未来,我们还可以进一步研究和改进该方法,提高机器人在复杂环境中的自主探索和任务执行能力。
【相关代码,程序地址】:http://fansik.cn/745653542898.html

