
- 1同步项目至GitHub_github上导入的项目如何自动同步
- 2Rk3288 Android 7.1/8.1默认开启网络ADB端口_安卓开启5555端口
- 3ROS机器人程序设计部分大纲-适用于蓝桥云课及ROS1 KINETIC/MELODIC/NOETIC_ros的机械臂技术与应用课程大纲
- 4大数据平台测试-chatgpt_gpt在大数据测试应用
- 5python+django计算机毕设选题列表pycharm毕业设计项目lw
- 6【LeetCode每日一题】706. 设计哈希映射
- 7Ubuntu git clone报错Failed to connect to github.com port 443: Connection refused_ubuntu git 443
- 8chatgpt赋能python:如何在Python中安装Django_python中django如何安装
- 9Flukit:轻量级Flutter UI库,助您快速构建美观应用
- 10攻略:Windwos 系统中应用程序访问权限_你的it管理员已限制对此应用的某些区域的访问,并且你尝试访问的项目不可 用。有关
【机器人】PyBullet四足机器狗仿真
赞
踩
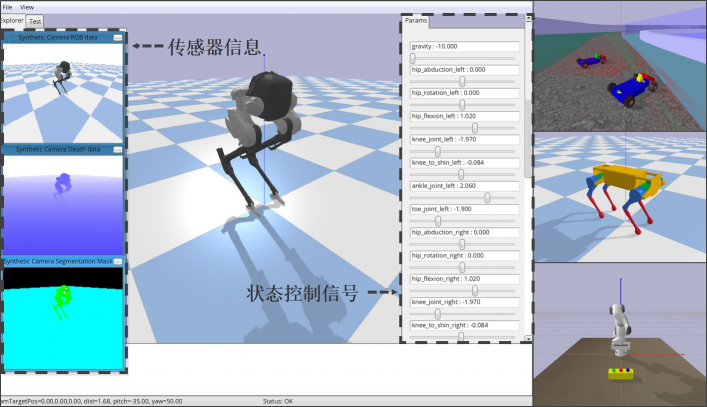
随着科技的迅猛发展,机器人技术正日益成为现实生活中的重要组成部分。而在机器人研究领域,仿真技术的应用扮演着不可或缺的角色。它不仅可以节约大量资源和成本,更为工程师和研究者提供了一个安全、高效的实验平台。在这个博客中,将探讨PyBullet仿真引擎,并着重介绍如何利用PyBullet进行四足机器狗的仿真。
PyBullet概述
PyBullet是一个开源的物理仿真引擎,专为机器人学、虚拟现实和游戏开发等领域设计。它由Erwin Coumans开发,最初作为Bullet物理引擎的Python绑定,因此得名PyBullet。Bullet物理引擎是一款广泛使用的高性能三维碰撞检测与物理仿真引擎,其主要用途是模拟现实世界中物体的运动和碰撞。PyBullet通过Python的简洁易用性,为机器人研究者、游戏开发者和仿真爱好者提供了一个强大且灵活的工具,使得他们能够快速构建和测试复杂的物理系统,从简单的刚体到复杂的多体动力学系统,以及各种类型的机器人模型。
PyBullet具有的特点和优势:
- 开源和跨平台:PyBullet是开源软件,可以在各种操作系统上运行,包括Windows、Linux、macOS等。
- Python接口:PyBullet使用Python编程语言作为主要接口,简化了API的使用,加速了原型开发和实验的速度。
- 高性能:PyBullet底层使用C++实现,继承了Bullet物理引擎出色的性能表现。
- 丰富的功能:支持刚体动力学、碰撞检测、约束条件、软体物体、多体动力学、关节等丰富的物理特性。
- 灵活性:PyBullet可以模拟多种物体之间的复杂关系,让用户能够自由定义物体之间的交互行为。
- 可扩展性:用户可以轻松添加自定义的模型、控制器和碰撞几何体,以满足不同场景的需求。
- 学习资源丰富:由于Bullet和PyBullet在机器人和游戏领域的广泛应用,因此有许多优秀的教程和社区支持,便于学习和解决问题。
四足机器狗简介
四足机器狗,也被称为四足机器人,是一类仿生机器人,模仿了真实狗类动物的外形和运动方式。这些机器狗通常由四条腿支撑,通过类似狗类的步态来移动和保持平衡。四足机器狗的概念可以追溯到二十世纪中期,但真正的实现始于近几十年,21 世纪初,机器人BigDog在 Boston Dynamics 正式问世,如图所示,BigDog 如其名,外形仿照哺乳动物狗建造,且能负重大体积货物,在驱动关节运动的执行器上,BigDog 设计并改进了液压驱动装置,腿部装有抗压缓冲机构,在山地,崎岖,冰面等环境下负载作业均获得了优异的效果,且机身上装载的计算机与传感器能够获取机器狗的各个状态及信息。随着机器人技术、传感器和控制算法的不断发展,四足机器狗的设计和性能得到了巨大的提升。为了实现稳定的移动和平衡,四足机器狗采用各种复杂的步态。常见的步态包括步行、奔跑、跳跃和旋转等,这些步态需要高度协调的动作和精确的控制。四足机器狗在各个领域都有潜在的应用。例如,它们可以用于灾难救援,探索危险环境,进行地质勘探,或者在军事和安保领域执行任务。此外,它们还可以成为日常生活中的助理机器人,辅助人们完成各种任务。

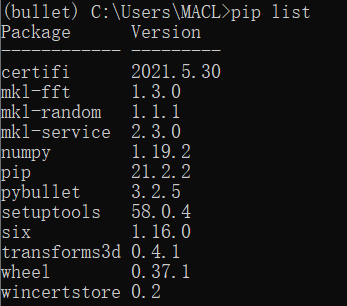
安装PyBullet和相关依赖
- # 使用Conda创建一个名为'bullet'的新虚拟环境,并指定Python版本为3.6
- conda create -n bullet python=3.6
-
- # 激活名为'bullet'的虚拟环境
- conda activate bullet
-
- # 在'bullet'虚拟环境中使用pip安装'numpy'包
- pip install numpy
-
- # 在'bullet'虚拟环境中使用pip安装'transforms3d'包
- pip install transforms3d
-
- # 在'bullet'虚拟环境中使用pip安装'pybullet'包
- pip install pybullet
-
- # 如果下载速度慢,可以使用清华源进行下载
- pip install package_name -i https://pypi.tuna.tsinghua.edu.cn/simple
- # 使用pip从清华大学的PyPI镜像安装名为'package_name'的包
- # 使用'-i'标志指定了清华大学镜像的URL
- # 将'package_name'替换为你想要安装的实际包名

创建仿真场景
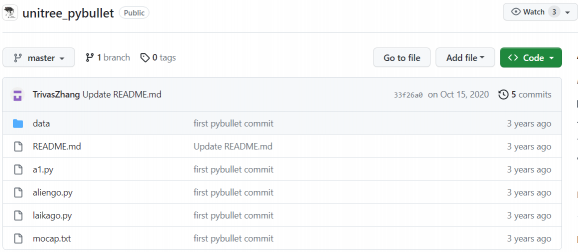
下载宇树科技四足机器狗的pybullet模型包:GitHub - unitreerobotics/unitree_pybullet
加载模型文件
- # 导入numpy库,这是一个用于处理数组和矩阵的库,可以用于数学计算
- import numpy as np
- # 导入pybullet库,这是一个用于3D物理仿真的库,可以用于创建和操作机器人模型
- import pybullet as p
-
- # 定义最大力id,这个id将被用来获取或设置四足机器人的最大推力
- maxForceId = None
- # 定义相机距离id,这个id将被用来获取或设置相机与机器人的距离
- cameraDistId = None
- # 定义关节id列表,这个列表将被用来存储机器人的所有关节id
- jointIds = []
- # 定义四足机器人对象,这个对象将被用来操作和控制机器人
- quadruped = None
- # 定义关节状态id列表,这个列表将被用来存储机器人所有关节的状态id
- jointStateIds = []
- # 定义预设位置列表,这个列表将被用来存储机器人的预设位置信息
- pre_pos = []
- # 使用列表推导式生成traceIds列表,这个列表将被用来存储跟踪机器人运动的轨迹id
- traceIds = [i * 4 + 5 for i in range(4)]
-
- # 速度id
- x_velId = None
- y_velId = None
- dog_pos = None
- target_pre_pos = None
- obs_init_pos = []
-
-
- def load_robot():
- # 全局变量
- global maxForceId
- global cameraDistId
- global quadruped
- global traceIds
- global x_velId
- global y_velId
- global obs_init_pos
- global target_pre_pos
- # 连接仿真环境
- p.connect(p.GUI, options="--width=1000 --height=700 --xPos=10 --yPos=10")
- plane = p.loadURDF("plane.urdf")
- p.setGravity(0, 0, -9.8)
- p.setTimeStep(1. / 100)
- # p.setDefaultContactERP(0) #设置默认的接触误差修正参数(ERP)
- # urdfFlags = p.URDF_USE_SELF_COLLISION+p.URDF_USE_SELF_COLLISION_EXCLUDE_ALL_PARENTS
- urdfFlags = p.URDF_USE_SELF_COLLISION # 启用机器人模型的自碰撞功能,允许模型的不同部分之间发生碰撞。
- quadruped = p.loadURDF(
- "a1/urdf/a1.urdf", [0, 0, 0.48], [0, 0, 0, 1], flags=urdfFlags, useFixedBase=False) # 加载模型
-
- for i in traceIds:
- pre_pos.append(p.getLinkState(quadruped, i)[0]) # 位置信息
-
- # enable collision between lower legs
- for j in range(p.getNumJoints(quadruped)): # 打印关节信息
- print(p.getJointInfo(quadruped, j))
-
- lower_legs = [2, 5, 8, 11]
- for l0 in lower_legs:
- for l1 in lower_legs:
- if (l1 > l0):
- enableCollision = 1
- print("collision for pair", l0, l1, p.getJointInfo(quadruped, l0)[
- 12], p.getJointInfo(quadruped, l1)[12], "enabled=", enableCollision)
- # 这行代码设置了链接2和链接5之间的碰撞过滤。它使用p.setCollisionFilterPair()函数来配置链接之间的碰撞关系,
- # 以及是否允许它们之间发生碰撞。enableCollision变量的值被用于确定是否允许碰撞。
- p.setCollisionFilterPair(
- quadruped, quadruped, 2, 5, enableCollision)
-
- maxForceId = p.addUserDebugParameter("maxForce", 0, 100, 20) # 力的最大
- cameraDistId = p.addUserDebugParameter("cameraDist", 0, 5, 1) # 摄像头距离
- x_velId = p.addUserDebugParameter("x_vel", -1, 1, 0)
- y_velId = p.addUserDebugParameter("y_vel", -1, 1, 0)
-
- for j in range(p.getNumJoints(quadruped)):
- p.changeDynamics(quadruped, j, linearDamping=0, angularDamping=0) # 将线性阻尼和角度阻尼都设置为0,这将减少关节的阻尼效果,使得机器人的运动更自由。
- info = p.getJointInfo(quadruped, j) # 关节信息
- # print(info)
- jointName = info[1]
- jointType = info[2]
- if (jointType == p.JOINT_PRISMATIC or jointType == p.JOINT_REVOLUTE):
- jointIds.append(j)
- if len(jointIds) % 3 == 0:
- jointStateIds.append(-np.pi / 2)
- elif len(jointIds) % 3 == 2:
- jointStateIds.append(np.pi / 4)
- else:
- jointStateIds.append(0)
- p.setRealTimeSimulation(0)
- p.configureDebugVisualizer(p.COV_ENABLE_GUI, 0) # 不显示GUI上的控件
- target_pre_pos = p.getLinkState(quadruped, 0)[0]
-
-
- if __name__ == '__main__':
- load_robot()
- while True:
- pass
点击【机器人】PyBullet四足机器狗仿真 - 古月居 可查看全文

