
- 1IOS学习笔记07---C语言函数-scanf函数
- 2Rust编程入门教程
- 3企业级大数据安全架构(十)DBeaver连接Hive的Kerberos认证配置_dbeaver怎么配置keytab
- 4华为OD机考统一考试C卷 找朋友(C++ Java JavaScript Python)_华为机试题java c卷
- 5YOLOv8 | 有效涨点,添加GAM注意力机制,使用Wise-IoU有效提升目标检测效果(附报错解决技巧,全网独家)_yolov8添加gaw注意力机制
- 6博客阅读:图解Transformer(The Illustrated Transformer)
- 7从外包辞职10000小时后,我走进了字节跳动····_字节外包辞职
- 8求助,为什么navicat查询结果不能分页_navicat 没有分页
- 9SENet(Squeeze-and-Excitation Network)注意力机制_senet注意力
- 10Logseq电脑端+安卓端同步gitee或github_logseq安卓
78、基于STM32单片机学习型搬运机器人四自由度机械臂机械手遥感控制设计 (程序+原理图+PCB源文件+参考论文+硬件设计资料+元器件清单等)_stm32控制机械臂原理图
赞
踩
一、设计简介:
本设计是基于STM32单片机学习型搬运机器人四自由度机械臂机械手遥感控制设计,主要实现以下功能:
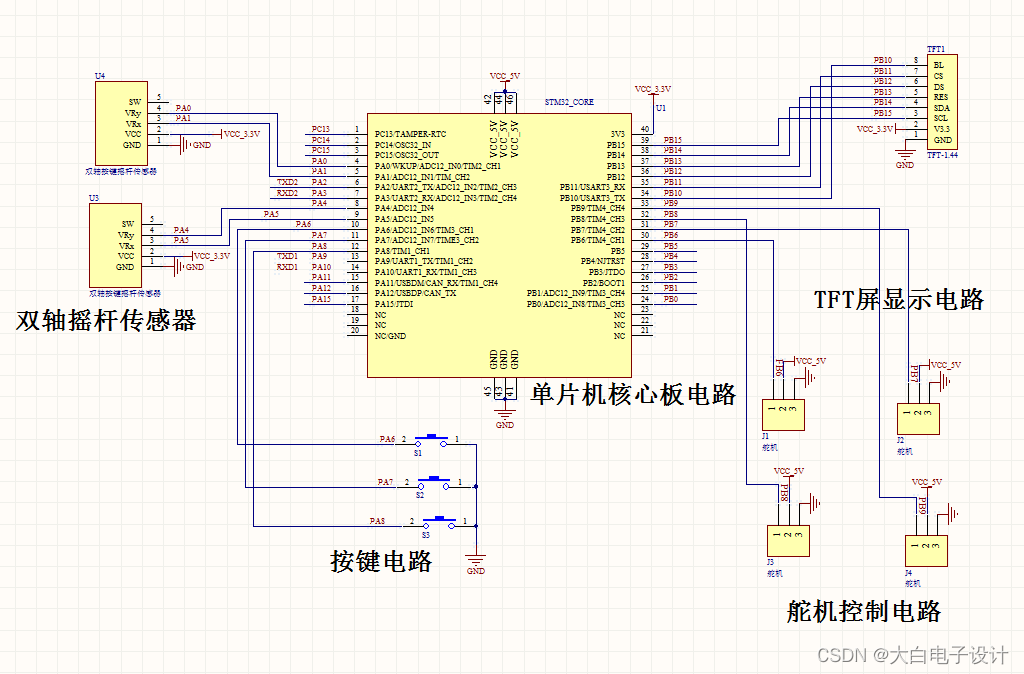
1、该系统由2个摇杆表达四个方向,对应驱动控制四个舵机的运行,搭配机械臂结构能够表达左右云台转动、前后机械臂运动、抓放轻物品及上下运动功能。
2、该系统分为“手动模式”、“学习模式”、“自动模式”,通过按键K1进行切换模式。上电默认是手动模式。
3、“手动模式”:通过2路摇杆左右、前后操作,控制四个舵机运动,搭配机械臂并能够抓取运输轻物品;摇杆操作时机械臂相应动作,不操作时静止不动。
4、“学习模式”:学习过程用到手动模式的操作,即通过2个摇杆的四个方向,分别能够控制四个舵机搭配机械臂运行。运动到某个需要记录的位置时,按键K2按下对当前四个自由度的舵机状态进行记录,最多记录20条动作,一般7个动作就能够表达出一个抓取、运输、投放等动作功能。并且对学习的动作步骤进行显示统计,方便在自动模式下进行运行。
5、“自动模式”:在学习模式学习后,进入该模式,(如果没有做过学习,无法进入自动模式)机械臂自动执行学习模式下学习的动作,比如学习模式中学习了,抓取、运输、投放等功能;该自动模式自动按照学习的运行动作反复抓取、运输、投放。并且能够显示当前操作步骤是学习模式下学习的第几步。
6、“复位模式”为隐含模式,任何情况下按键K3按下,能够恢复多节到原始位置。即按下K3后,四个舵机自动运行到上电时初始位置,然后退出复位模式返回到手动控制模式。
主要硬件组成:
STM32F103C8T6单片机核心板、1.44寸TFT彩屏、四路舵机(搭配机械臂四个自由度控制)、2路摇杆(四个方向)、按键
二、原理图
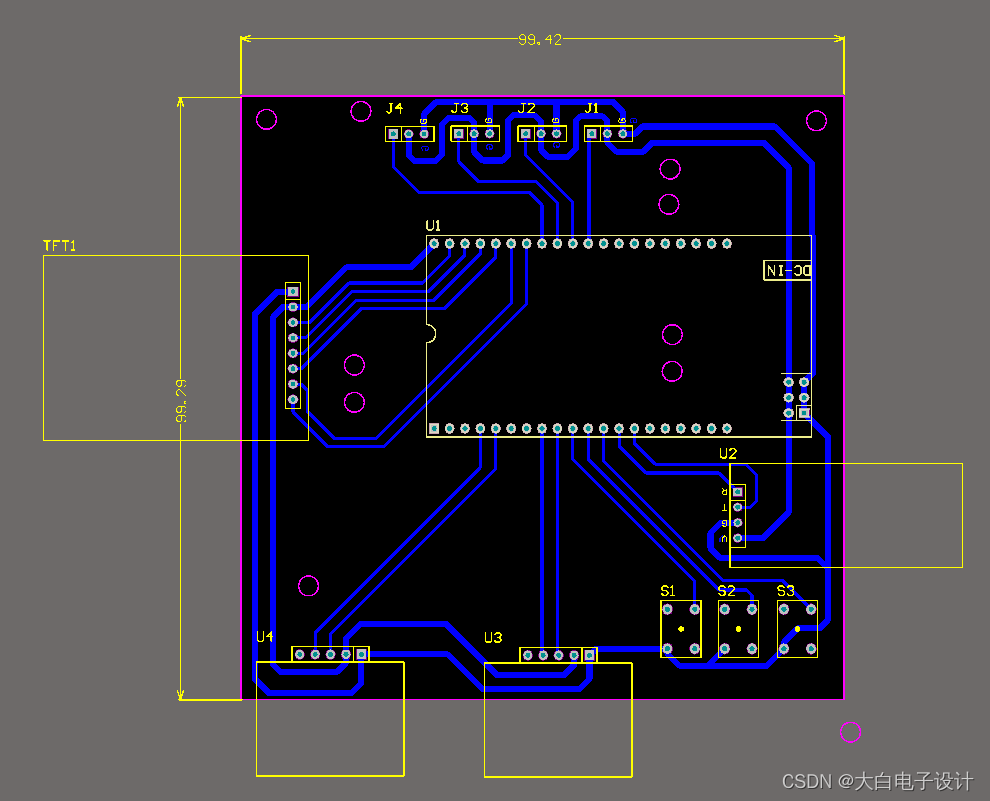
三、PCB图
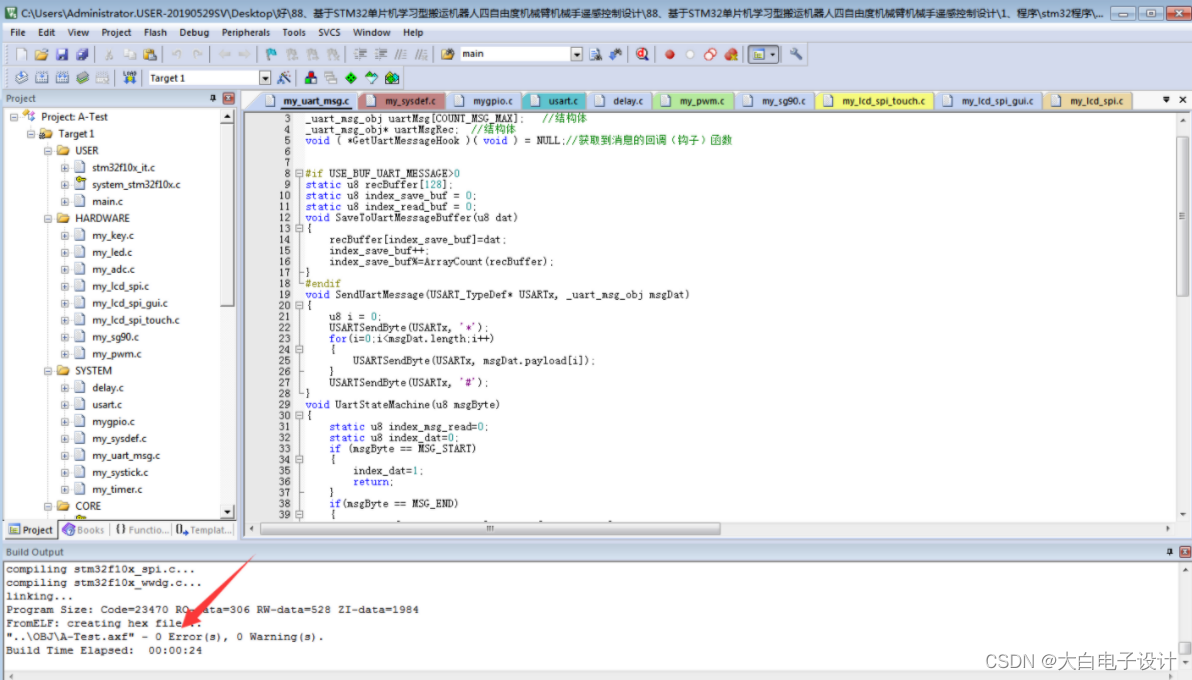
四、程序源码
五、资源获取
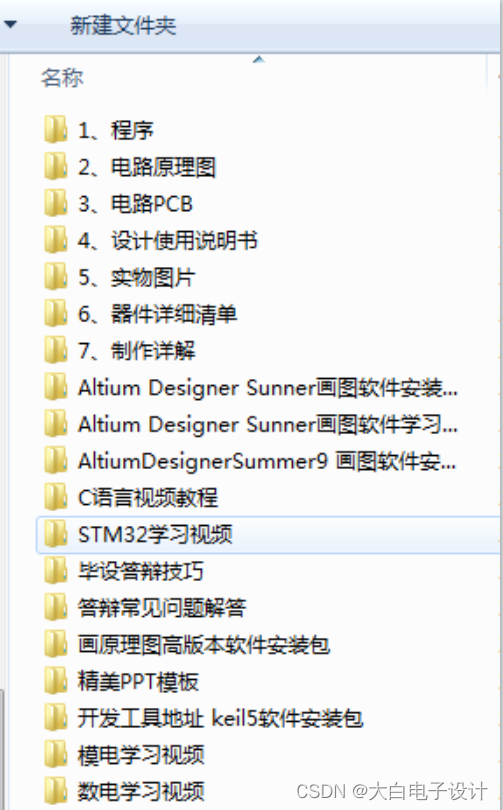
本项目包含的所有文件都可以点击下面的名片,发送 “ 78、基于STM32单片机学习型搬运机器人四自由度机械臂机械手遥感控制设计 ” 获取!
项目纯手打,不是免费的哦~
希望可以帮到你哈!

