
热门标签
热门文章
- 1Kafka最全知识总结(建议收藏)_kafka知识介绍
- 22024工作效率提升指南:免费AI工具助你轻松工作_pearocr
- 3大模型遇上心理健康咨询:MeChat、QiaoBan、SoulChat、MindChat四大心理健康领域微调模型总结
- 4【AIGC调研系列】通义千问、文心一言、抖音云雀、智谱清言、讯飞星火的特点分析_通义千问和文心一言哪个更好用
- 5React组件化_react 引用组件化
- 6pyspark的使用和操作(基础整理)_pyspark使用
- 7车载AIGC的内容创作解决方案,拓展无限可能
- 8CSS两种盒子模型_css和模型content和width区别
- 9高速固态存储卡学习资料第701篇:基于6U VPX XC7V690T的阵列M.2高速固态存储卡_vpx 板卡 复旦微690t方案
- 10Node.js 是什么以及gulp 构建Node.js 应用
当前位置: article > 正文
如何将rviz写入launch文件_rviz怎么写到launch中
作者:凡人多烦事01 | 2024-05-25 20:24:34
赞
踩
rviz怎么写到launch中
有些功能包launch以后只能打开gazebo,不能进行rviz的显示,下面展示如何将rviz写入launch文件,则以后launch的时候直接就能够在rviz中显示。
首先,launch一下,如
roslaunch mrobot_gazebo view_mrobot_with_camera_gazebo.launch
- 1
然后打开了一系列节点,信息(topic)开始流动。
这时候在命令行输入
rosrun rviz rviz
- 1
可以打开rviz,在此界面ADD 一个RobotModel 并更改fixed frame,则可以实现机器人模型的显示,如下图
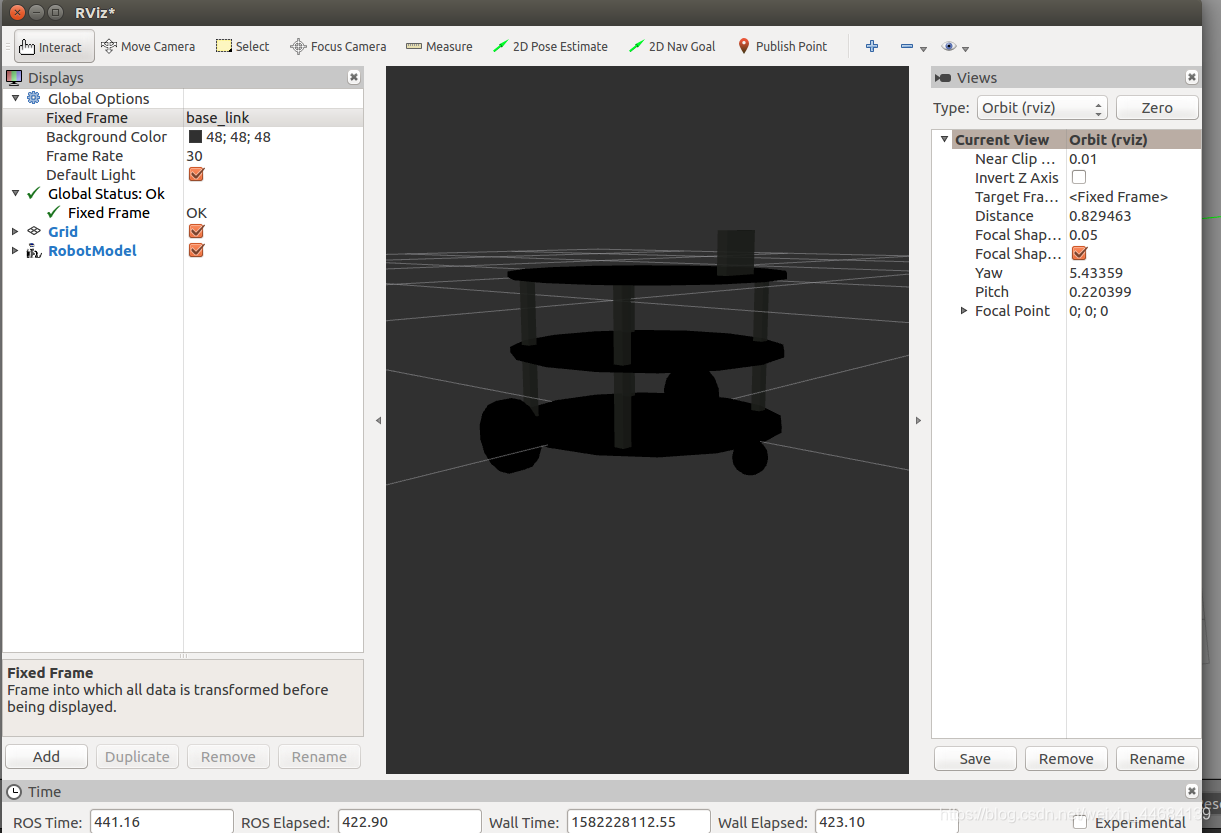
颜色之所以是黑色是因为urdf中设置的就是黑色。
接下来:
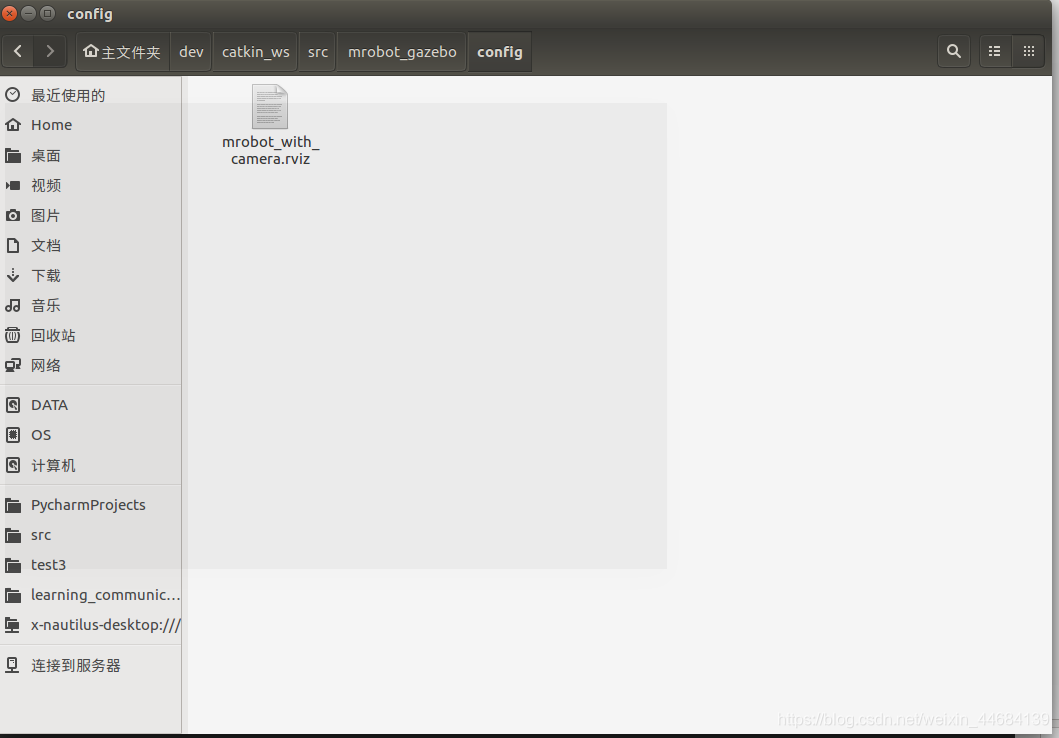
点击左上角File -> Save Config as
(如果找不到File则最大化窗口)
另存为到软件包中的config文件夹下,文件名自己随便设定
结果如下
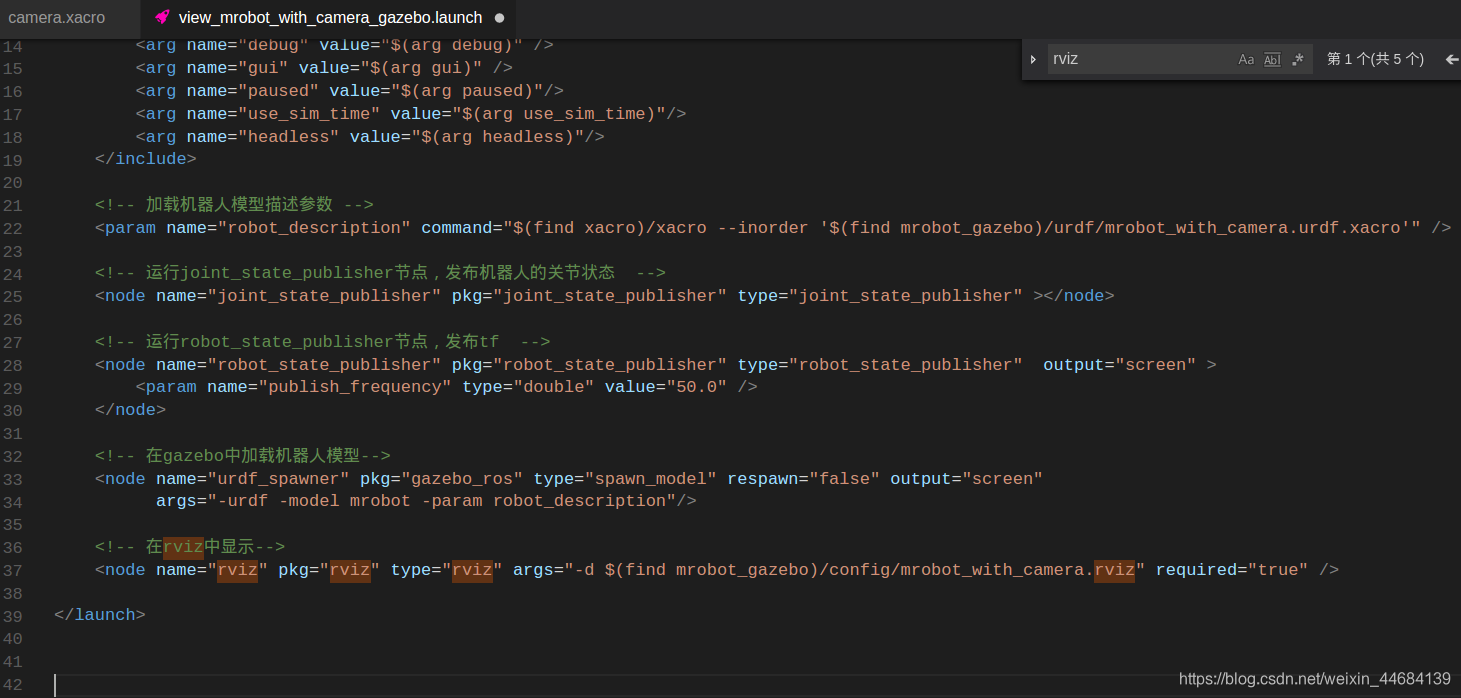
然后在你原本的launch文件最后加入运行rviz的语句
<!-- 在rviz中显示-->
<node name="rviz" pkg="rviz" type="rviz" args="-d $(find mrobot_gazebo)/config/mrobot_with_camera.rviz" required="true" />
- 1
- 2
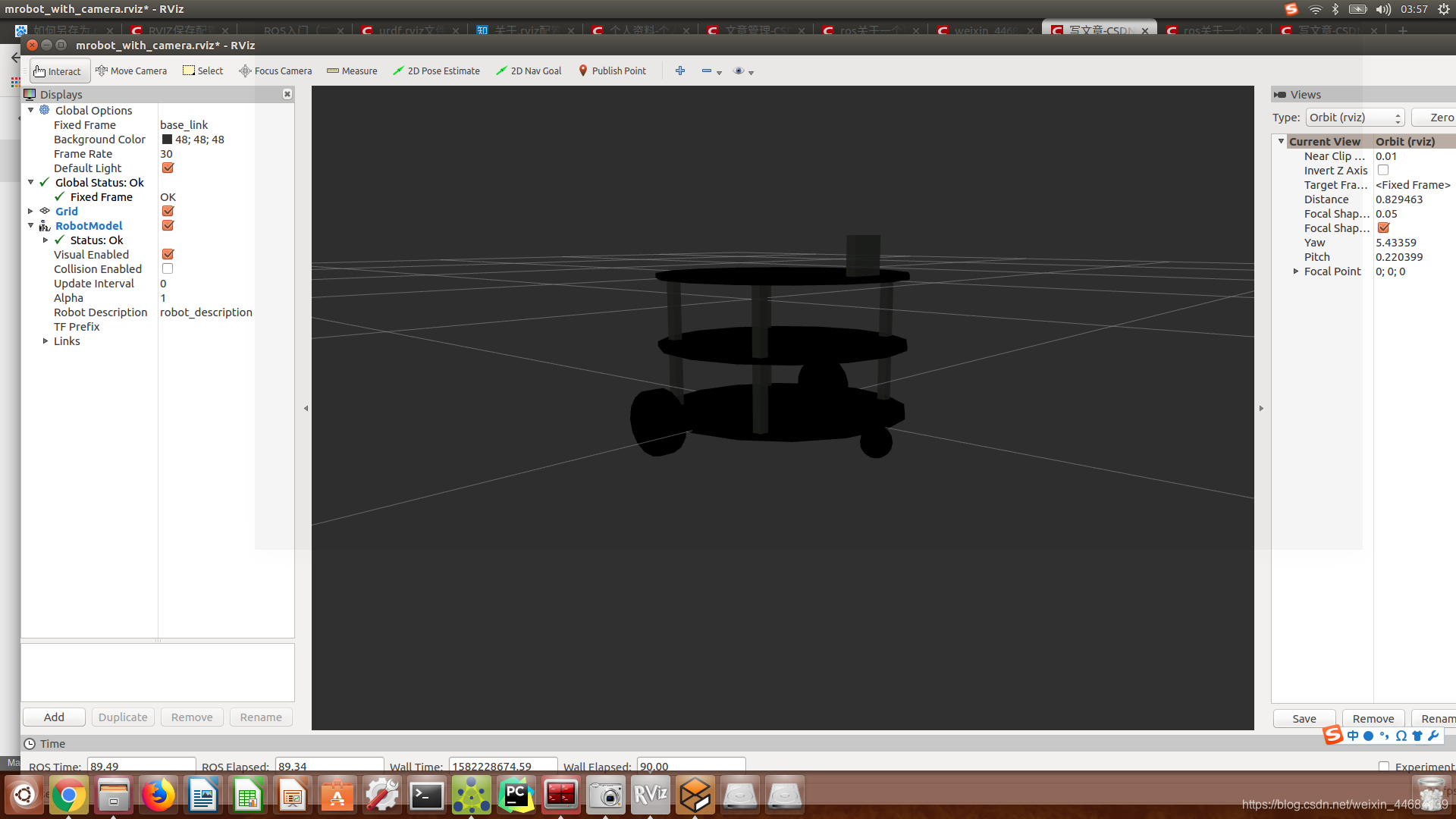
最后结果
然后测试一下
测试成功!!!!!!!!!
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/凡人多烦事01/article/detail/623632
推荐阅读
相关标签

