
- 1rabbitmq 清理消息队列 解决 启动消费者报错_由于队列不存在,启动消费者报错的这个问题
- 2[PAT- Advanced Level] 甲级题解目录(Advanced Level)_pta甲级在哪里
- 3Android Studio虚拟机配置出现Intel® HAXM installation failed_intel haxm
- 4在阿里云上部署ChatGLM3_chatglm 阿里云
- 5SLA服务可用性4个9是什么意思?怎么达到?_四个9 原则 稳定性
- 6web自动化测试详细流程和步骤_web自动化怎么做
- 7USB_xHCI协议(一) —— 概述_usb xhci
- 8bram_bram的ena和wen
- 9qtsharememory判断有没有写入内容_[代码审计] LvyeCms 任意文件写入Getshell漏洞分析...
- 10计算机专业英语mooc,专业英语(软件)-中国大学mooc-题库零氪
C51最小系统板红外遥控控制小车_小车如何添加加速和减速功能
赞
踩
C51最小系统板红外遥控控制小车
一、前言
本文将实现用51的最小系统板以及一个红外遥控来控制小车的7种状态:前进、后退、左转、右转、加速、减速、停止。
本文重点不在于红外的原理解释,须事先知到红外遥控的键值。
本文重点:小车连线、PWM控制车速。
写这篇文章的目的:1.方便后面如果有需要的话自己回看;2.能给纯小白提供一点思路
二、所需材料
1.智能小车底板×1
2.直流电机×4
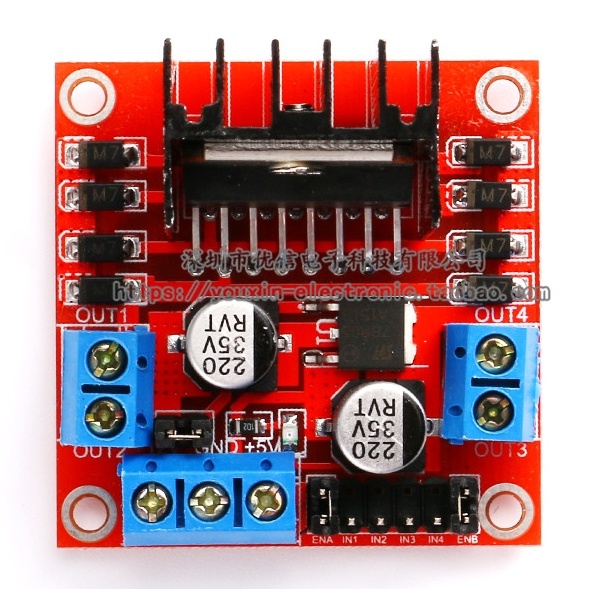
3.L298N电机驱动模块×1
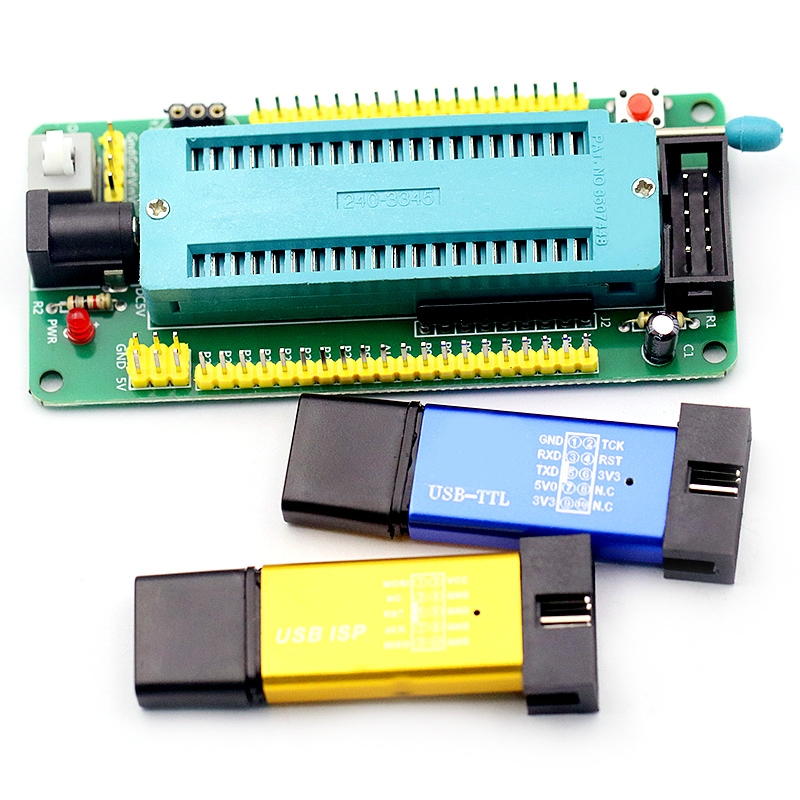
4.51最小系统板(含STC89C52芯片)×1
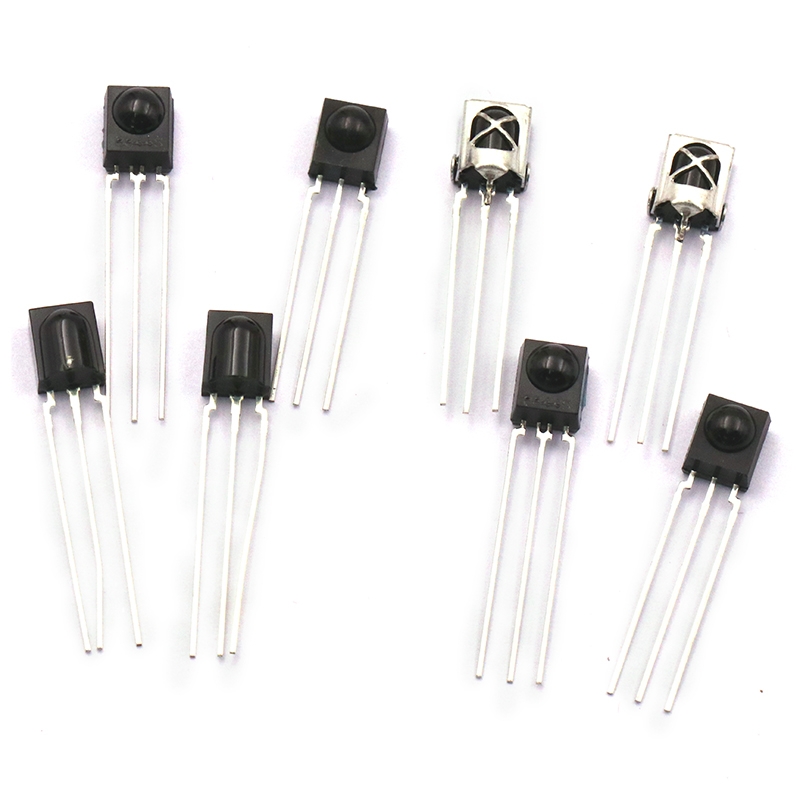
5.红外遥控×1
6.面包板×1(非必需,仅为了方便连线)
7.干电池(我这里用的是12v的,9v左右可能刚好,6v可能有点低)
8.杜邦线若干
9.螺丝钉螺丝帽若干
10.铜柱若干(用来固定各模块)
11.USB转TTL下载器×1
三、小车连线
我使用的L298N如下图所示:
最小系统板和USB转TTL模块如下:
红外接收模块:
接线说明: L298N -- IN1 -- P1.2 IN2 -- P1.3 IN3 -- P1.6 IN4 -- P1.7 ENA -- P1.4 ENB -- P1.5 OUT1 -- 左电机接口1 OUT2 -- 左电机接口2 OUT3 -- 右电机接口1 OUT4 -- 右电机接口2 12v -- 电池盒正极 GND -- 电池盒负极 GND -- 单片机GND 5v -- 单片机5v 红外模块数据接收口 -- P3.2 红外模块vcc -- vcc 红外模块GND -- GND

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
接线比较乱的话建议用面包板引出公共端。
四、动手编程序
红外遥控这里可以参考上一篇文章:https://blog.csdn.net/Aiden_yan/article/details/122932969?spm=1001.2014.3001.5501
4.1 根据连线对电机的IO口进行定义
/*电机驱动IO定义*/
sbit IN1=P1^2; //为1 左电机反转
sbit IN2=P1^3; //为1 左电机正转
sbit IN3=P1^4; //为1 右电机正转
sbit IN4=P1^5; //为1 右电机反转
sbit EN1=P1^0; //为1 左电机使能
sbit EN2=P1^7; //为1 右电机使能
//--------------------//
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
4.2 封装一下电机的使能和正转反转控制
//----------- 功能定义 -----------//
#define left_motor_en EN1=1 //左电机使能
#define left_motor_stops EN1=0 //左电机停止
#define right_motor_en EN2=1 //右电机使能
#define right_motor_stops EN2=0 //右电机停止
#define left_motor_go IN1=1,IN2=0 //左电机正转
#define left_motor_back IN1=0,IN2=1 //左电机反转
#define right_motor_go IN3=0,IN4=1 //右电机正转
#define right_motor_back IN3=1,IN4=0 //右电机反转
//----------- 功能定义 -----------//
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
注意:这个正转反转的IN1和IN2是可以调整的,也就是根据你的接线来调整的,如果你接好之后发现电机的转向不一样,可以调整这里的IN口。
4.3 函数定义
//函数定义
void delay(unsigned int z);
void delay_us(unsigned int aa);
void forward();//小车前进
void backward();//小车后退
void left();//小车左转
void right();//小车右转
void stop();//小车停止
void speed_up();//加速
void speed_down();//减速
void PWM();
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
4.4 小车前进后退左转右转
/*小车前进*/ void forward() { left_motor_en; right_motor_en; left_motor_go;//左电机正转 right_motor_go;//右电机正转 } /*小车后退*/ void backward() { left_motor_en; right_motor_en; left_motor_back;//左电机反转 right_motor_back;//右电机反转 } /*小车左转*/ void left() { left_motor_stops; right_motor_en; right_motor_go;//右电机正转 } /*小车右转*/ void right() { left_motor_en; right_motor_stops; left_motor_go;//左电机正转 }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
4.5 小车的加速减速以及停止
小车的速度控制需要用到pwm,这里先简单介绍一下。
电源电压输出是固定的,电机的转速也因此是固定的,为了调节电机的转速,就得改变电源电压的输出。用PWM调制的方法,把恒定的直流电源电压调制成频率一定宽度可变的脉冲电压序列,从而可以改变平均输出电压的大小,以调节电机的转速。电源电压在此处就是51MCU的引脚输出,4.5-5V,只要在引脚上产生频率可调的波形即可。我的代码里设定一个周期为40ms,假如不加速度控制,那么这40ms里面将会持续输出高电平,此时的占空比就是100%;假如我用20ms输出高电平,20ms输出低电平,那么占空比将为50%;同理,当我用8ms输出高电平,32ms输出低电平,此时占空比为20%。
周期的计数很简单,我们只需要编写一个函数,然后把它放在中断里:
//pwm波控制电机的转速 void PWM() { static unsigned int cnt; cnt++; //一个周期 if(cnt==40) { cnt=0; } if(cnt <= speed)//小于等于才符合正常的逻辑,如果是大于等于,则speed越大,车速越小 { left_motor_en; //左电机使能 right_motor_en; //右电机使能 } else { left_motor_stops; //左电机停止 right_motor_stops; //右电机停止 } } void time0() interrupt 1 //定义定时器0 { IRtime++; //检测脉宽,1次为278us PWM(); //在中断中自动计数 }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
这样当speed越大的时候,占空比就越大,从而车速越高。
/*小车停止*/ void stop() { speed = 0; left_motor_stops;//左电机停止 right_motor_stops;//右电机停止 } /*小车加速*/ void speed_up() { speed = speed + 2; } /*小车减速*/ void speed_down() { if(speed >= 2) speed = speed - 2; else speed = 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
4.6全部程序代码
由于我原来的遥控器搞丢了,随便找了个红外遥控器,所以我这里的键值是不全的。读者可以在main()函数中的switch语句里修改对应的case值为自己红外遥控器的键值。如果需要修改车速,修改speed的值即可。
#include<reg52.h> /* C51红外遥控控制小车前进后退左转右转加速减速停止程序 接线说明: L298N -- IN1 -- P1.2 IN2 -- P1.3 IN3 -- P1.6 IN4 -- P1.7 ENA -- P1.4 ENB -- P1.5 OUT1 -- 左电机接口1 OUT2 -- 左电机接口2 OUT3 -- 右电机接口1 OUT4 -- 右电机接口2 12v -- 电池盒正极 GND -- 电池盒负极 GND -- 单片机GND 5v -- 单片机5v */ /*电机驱动IO定义*/ sbit IN1=P1^2; //为1 左电机反转 sbit IN2=P1^3; //为1 左电机正转 sbit IN3=P1^4; //为1 右电机正转 sbit IN4=P1^5; //为1 右电机反转 sbit EN1=P1^0; //为1 左电机使能 sbit EN2=P1^7; //为1 右电机使能 //--------------------// //----------- 功能定义 -----------// #define left_motor_en EN1=1 //左电机使能 #define left_motor_stops EN1=0 //左电机停止 #define right_motor_en EN2=1 //右电机使能 #define right_motor_stops EN2=0 //右电机停止 #define left_motor_go IN1=1,IN2=0 //左电机正转 #define left_motor_back IN1=0,IN2=1 //左电机反转 #define right_motor_go IN3=0,IN4=1 //右电机正转 #define right_motor_back IN3=1,IN4=0 //右电机反转 //----------- 功能定义 -----------// //函数定义 void delay(unsigned int z); void delay_us(unsigned int aa); void forward();//小车前进 void backward();//小车后退 void left();//小车左转 void right();//小车右转 void stop();//小车停止 void speed_up();//加速 void speed_down();//减速 void PWM(); /*==================================== 自定义类型名 ====================================*/ typedef unsigned char uchar; typedef unsigned int uint; /*==================================== 硬件接口位声明 ====================================*/ sbit IR = P3^2; //定义红外脉冲数据接口 外部中断O输入口 uint speed; // 定义车速 uchar IRtime; //检测红外高电平持续时间(脉宽) uchar IRcord[4]; //此数组用于储存分离出来的4个字节的数据(用户码2个字节+键值码2个字节) uchar IRdata[33]; //此数组用于储存红外的33位数据(第一位为引导码用户码16+键值码16) bit IRpro_ok, IRok; //第一个用于红外接收4个字节完毕。IRok用为检测脉宽完毕 void init(); void IRcordpro(); void IRcordpro() //提取它的33次脉宽进行数据解码 { uchar i, j, k, cord, value; /*i用于处理4个字节,j用于处理一个字节中每一位,k用于33次脉宽中的哪一位 cord用于取出脉宽的时间判断是否符合1的脉宽时间*/ k = 1; //从第一位脉宽开始取,丢弃引导码脉宽 for(i = 0; i < 4; i++) { for(j = 0; j < 8; j++) { cord = IRdata[k]; //把脉宽存入cord if(cord > 5) //如果脉宽大于我11.0592的t0溢出率为约278us*5=1390那么判断为1 value = value | 0x80; /*接收的时候是先接收最低位, 把最低位先放到value的最高位在和0x08按位或一下 这样不会改变valua的其他位的数值只会让他最高位为1*/ if(j < 7) { value = value >> 1; //value位左移依次接收8位数据。 } k++; //每执行一次脉宽位加1 } IRcord[i] = value; //每处理完一个字节把它放入IRcord数组中。 value = 0; //清零value方便下次在存入数据 } IRpro_ok = 1; //接收完4个字节后IRpro ok置1表示红外解码完成 } /*******************主函数**************************/ void main() { init(); //执行初始化定时器0和外部中断0 EN1 = EN2 = 0;//一开始时不使能电机 speed = 8;//设定初始速度为8,8/40=0.2,所以初始是20%占空比,speed越大占空比越高,从而车的速度越大 while(1) { if(IRok) //判断脉宽是否检测完毕 { IRcordpro();//根据脉宽解码出4个字节的数据 IRok = 0; //重新等待脉宽检测 if(IRpro_ok) //判断是否解码完毕 { switch(IRcord[2]) { case 0x18: forward(); break; //前进 case 0x52: backward(); break; //后退 // case 0x08: left(); break;//左转 // case 0x5A: right(); break;//右转 case 0x1C: stop(); break;//停止 case 0x08: speed_up(); break;//加速 case 0x5A: speed_down(); break;//减速 default: break; } IRpro_ok = 0; } } } } /******************z 秒延时函数*************************/ void delay(unsigned int z) { unsigned int x,y; for(x=z;x>0;x--) for(y=110;y>0;y--); } /****************微妙延时******************************/ void delay_us(unsigned int aa) { while(aa--); } /*小车前进*/ void forward() { left_motor_en; right_motor_en; left_motor_go;//左电机正转 right_motor_go;//右电机正转 } /*小车后退*/ void backward() { left_motor_en; right_motor_en; left_motor_back;//左电机反转 right_motor_back;//右电机反转 } /*小车左转*/ void left() { left_motor_stops; right_motor_en; right_motor_go;//右电机正转 } /*小车右转*/ void right() { left_motor_en; right_motor_stops; left_motor_go;//左电机正转 } /*小车停止*/ void stop() { speed = 0; left_motor_stops;//左电机停止 right_motor_stops;//右电机停止 } /*小车加速*/ void speed_up() { speed = speed + 2; } /*小车减速*/ void speed_down() { if(speed >= 2) speed = speed - 2; else speed = 0; } void init() //初始化定时器0 和外部中断0 { TMOD = 0x02; //定时器0工作方式2,8位自动重装 TH0 = 0x00; //高8位装入0那么定时器溢出一次的时间是256个机器周期 TL0 = 0x00; EA = 1; //总中断 ET0 = 1; //定时器0中断 TR0 = 1; //启动定时器0 IT0 = 1; //设置外部中断0为跳沿触发方式,来一个下降沿触发一次 EX0 = 1; //启动外部中断0 } void time0() interrupt 1 //定义定时器0 { IRtime++; //检测脉宽,1次为278us PWM(); //在中断中自动计数 } void int0() interrupt 0 //定义外部中断0 { static uchar i; // 声明静态变量(在跳出函数后在回来执行的时候不会丢失数值)i用于把33次高电平的持续时间存入IRdata static bit startflag; //开始储存脉宽标志位 if(startflag) //开始接收脉宽检测 { if( (IRtime < 53) && (IRtime >= 32) ) /*判断是否是引导码,底电平9000us+高4500us 这个自己可以算我以11.0592来算了NEC协议的引导码低8000-10000+高4000-5000 如果已经接收了引导码那么i不会被置0就会开始依次存入脉宽*/ i = 0; //如果是引导码那么执行i=0把他存到IRdata的第一个位 IRdata[i] = IRtime; //以T0的溢出次数来计算脉宽,把这个时间存到数组里面到后面判断 IRtime = 0; //计数清零,下一个下降沿的时候在存入脉宽 i++; //计数脉宽存入的次数 if(i == 33) //如果存入34次 数组的下标是从0开始i等于33表示执行了34次 { IRok = 1; //那么表示脉宽检测完毕 i = 0; //把脉宽计数清零准备下次存入 } } else { IRtime = 0; //引导码开始进入把脉宽计数清零开始计数 startflag = 1; //开始处理标志位置1 } } //pwm波控制电机的转速 void PWM() { static unsigned int cnt; cnt++; //一个周期 if(cnt==40) { cnt=0; } if(cnt <= speed)//小于等于才符合正常的逻辑,如果是大于等于,则speed越大,车速越小 { left_motor_en; //左电机使能 right_motor_en; //右电机使能 } else { left_motor_stops; //左电机停止 right_motor_stops; //右电机停止 } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
代码就这一个,我全部写在一个.c文件里了。
参考资料
1.51单片机PWM控制电机:https://blog.csdn.net/lixiangminghate/article/details/42342595

