
热门标签
热门文章
- 1AndroidStudio升级Gradle之坑_android studio grade报错
- 2AI大模型应用入门实战与进阶:构建你的第一个大模型:实战指南_ai大模型 实战
- 3adb 命令行安装软件_adb 从u盘安装应用
- 4[4.1截止]OPPO 24校招25实习-150岗欢迎投递_oppo后端开发实习生
- 5【上手AI】爆好用的AI工具Coze 告别头疼的英文文档_coze ai
- 6单元平均恒定虚警率CFAR的matlab仿真
- 7HTML新春烟花盛宴
- 8【Activiti研究】百度富文本编辑器扩展(为自定义表单扩展做铺垫)_富文本编辑器 扩展功能
- 9Python基础代码爬取超链接文字及链接_如何爬取文件名里的超链接
- 10操作系统作业_使用tsl指令实现进程互斥的伪代码
当前位置: article > 正文
ROS源码分析-week9_ros 源码 分析
作者:凡人多烦事01 | 2024-06-04 00:56:02
赞
踩
ros 源码 分析
2021SC@SDUSC
1. 本周工作目标
这周继续阅读ros导航部分的代码,希望能大致理解导航部分ros包的架构。结合实际情况,本周的工作目标如下:
-
详细分析架构图
-
根据架构图,分析各部分对应的具体的代码包
2. 导航架构图分析
首先复习一下上一章在wiki里发现的的架构图:
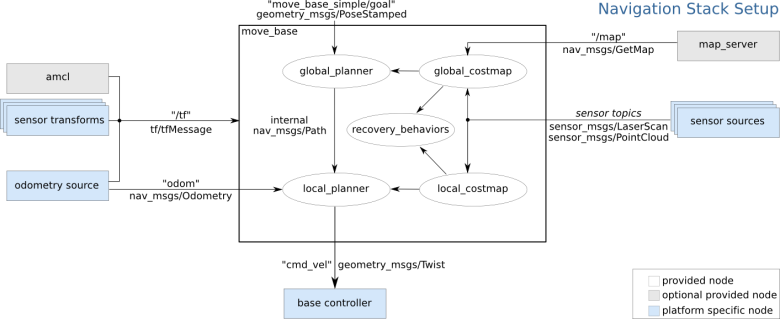
我们详细分析一下这张图的各个部分:
| 包名 | 来源 | 功能 | 备注 |
|---|---|---|---|
| move_base | 官方提供 | 整合各种信息来源,用dijstra或者A*算法规划机器人运动路径 | |
| map_server | 官方提供 | 为机器人提供地图信息 | 地图信息需要预先建立 |
| amcl | 官方提供 | 在地图中对机器人进行定位 | 基于粒子算法 |
| odometry sources | 机器人平台提供 | 提供机器人运动里程计信息 | |
| sensor sources | 机器人平台提供 | 机器人的传感器信息(如激光雷达传感器、加速度传感器等) | |
| base controller | 机器人平 |
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/凡人多烦事01/article/detail/669676
推荐阅读

相关标签

