
- 1ChatGPT学习系列教程(三)— 提示词设计_chatgpt 工作流程
- 2开源小项目 - 基于无源蜂鸣器实现的音乐播放器_无源蜂鸣器播放音乐
- 3MySQL(100)MySQL GRANT:用户授权_mysql grant权限
- 4【0基础入门Python Web笔记】四、python 之计算器的进阶之路_python web 计算器代码
- 5开源软件安全与应对策略探讨 - Java 机密计算技术应用实践_开源软件安全 应对策略
- 6脏读,不可重复读,幻读,丢失更新(乐观锁,悲观锁)_乐观锁会出现幻读吗
- 7python金融分析小知识(27)——如何通过python连接Wind(万得)数据库_wind python
- 8TBXML 的简单使用_tbxmm
- 9mysql的cj是什么包_mysql com.mysql.cj.jdbc.Driver 配置
- 10软件测试岗位就业竞争压力大,985毕业的“打工人“同样存在苦不堪言_测试工程师校招竞争激烈吗
经典文献阅读之--lris(优于Scan Context的回环检测)_lidar iris for loop-closure detection
赞
踩
0. 前言
作为激光雷达的回环而言,最经典的仍然是Scan Context,但是Scan Context仍然会存在有一些缺陷,一是它只利用了最大的高度,丢失了很多点云信息,二是Scan-Context不具有旋转不变性,需要进行暴力匹配,三是Scan-Context缺少特征提取步骤。所以文章《LiDAR Iris for Loop-Closure Detection》,同时作者也将代码开源到了Github上:https://github.com/JoestarK/LiDAR-Iris,下面我们来详细梳理一下这篇文章.
1. 闭环策略
作为SLAM的回环来说,目前主要有四种闭环检测策略:
-
point-to-point matching,即点到点的匹配(如,ICP,NDT及其变种);
-
从3D点云中检测关键点,并从每个关键点位置中提取描述子,然后利用词袋模型(bag-of-words (BoW) model)进行场景匹配(BoW,BoW3d等)。
-
从点云中提取以直方图的形式表示的全局描述子(如ESF, FPFH, VFH, M2DP,Scan Cntext)。
-
基于卷积神经网络(CNNs)模型的方法。
2. 本文贡献
如上文所说,目前激光的全局或者局部的描述子能力和不变性有所欠缺,同时不具有旋转不变性,需要暴力的匹配,在Scan Context中使用了 N r N_r Nr (Rings)的快速搜索算法来节省时间,但是也损失了对应的精度。而本文的方法解决了上述的缺陷
- 提出了一个LiDAR点云的全局描述符LiDAR Iris,将一个地方总结为在LiDAR-Iris图像表示上进行几次Gabor过滤和阈值操作后获得的二进制签名图像, 充分利用了点云的大部分信息。
- 该全局描述符具有旋转不变性,避免了暴力搜索,节约了计算资源。
- 与现有的LIDAR全局描述符相比,该描述符的性能达到了SOTA。
3. 主要内容
准确的说,Lidar Iris描述符的生成理论上可以从执行上可以分解为三个模块:一是生成Lidar-Iris图像的表示;二是通过傅立叶变换使得Lidar-Iris具有平移不变性;三是基于LoG-Gabor滤波器的二值特征提取。下面我们就来对这三个执行模块进行分析.
3.1 LiDAR-lris图像
首先和Scan Context思想类似,即将三维点云映射成二维图像,对应的方法如下图所示
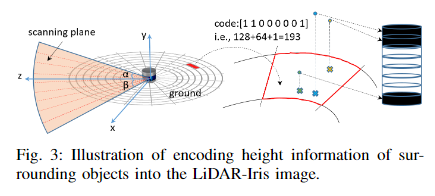
作者保留了一个以雷达为中心的
k
∗
k
(
m
)
k*k(m)
k∗k(m)的一个正方形作为有效感应区(本文取
k
=
80
m
k=80m
k=80m),激光雷达的位置作为正方形的中心。以这个正方形为单位,将点云离散为80(沿半径的方向的) * 360(角向)的bin。值得注意的是,压缩成二维平面后,每一个区域中仍然具有高度、距离、反射率等特性,如果舍去就和栅格地图无异了,所以作者通过八位二进制代码对同一个bin内的所有点进行编码。以高度的编码方法举例,对于每一个bin内的点云集,首先按照高度的大小顺序,线性离散为8个bin,并不是每个bin都会有点,有点的bin值为1,否则为0,从而可以获得上图中的8位二进制编码。
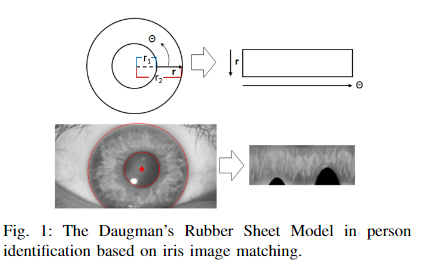
同时借鉴了虹膜算法,将我们bin的环形鸟瞰图转化为像素条,形成和Scan Context类似的结果,有区别的是Lidar-IRIS图像的像素强度为每个bin的8位二进制数所转换的十进制数,而Scan Context是获取了当前位置的最高高度,这样其实是丢失了很多信息。
最后,与现有的基于直方图的全局描述符相比,所提出的编码过程不需要对每个bin中的点进行计数,从而提高了计算效率,但是又保存了大致的特征,不会受到噪声的干扰。
3.2 平移不变性Lidar-Iris的傅立叶变换
虽然在空间上来看是一个圆,应该有旋转不变性。但我们按照
0
−
2
π
0 - 2\pi
0−2π展开成 2D 图像后,像素条 对 Lidar 的朝向就变得敏感了。朝向稍微偏几度可能整体图像就有比较大的平移从而不相似了。所以作者提出了平移不变性Lidar-Iris的傅立叶变换。在学过图像处理的同学知道,傅里叶频谱可以有效地解决平移导致匹配重合度不高的问题

同时傅里叶本身又具有旋转变化性,这就导致非常适合我们的像素条的监测。

基于傅里叶变换的方案能够估计粗略的点云旋转、缩放和平移(用不到缩放)。点云的旋转对应于经过傅里叶变换后的Lidar-IRIS图像的水平平移,反映到傅里叶变换后两幅图像是完全没有差异的。
而点云的平移则是对应傅里叶变换后的 LiDAR-Iris 图像的垂直方向上的平移,会引起Lidar-IRIS 图像像素强度的轻微变化,从而导致傅里叶变换后本身的频谱发生轻微的变化。 但是Lidar-IRIS以bin为最小单位保留了点云的绝对内部结构,并没有那么高的分辨率,所以提高了辨别能力的同时又对图像像素强度的变化具有鲁棒性, 所以可以忽略由机器人在小范围内平移引起的 LiDAR-Iris 图像中强度的变化。
假设两个Lidar-IRIS图像仅仅差别一个位移(
δ
x
,
δ
y
\delta_x,\delta_y
δx,δy),例如
I
1
(
x
,
y
)
=
I
2
(
x
−
δ
x
,
y
−
δ
y
)
I_1(x,y) = I_2(x −δx,y −δy)
I1(x,y)=I2(x−δx,y−δy),那么这两个图像之间的傅立叶变换可以定义为
I
^
1
(
w
x
,
w
y
)
e
^
−
i
(
w
x
δ
x
+
w
y
δ
y
)
=
I
^
2
(
w
x
,
w
y
)
\hat{I}_1(w_x,w_y) \hat{e}^{−i(w_x δ_x +w_y δ_y )}= \hat{I}_2(w_x,w_y)
I^1(wx,wy)e^−i(wxδx+wyδy)=I^2(wx,wy)
对应的,归一化的交叉功率谱定义为:
C
o
r
r
^
=
I
^
2
(
w
x
,
w
y
)
I
^
1
(
w
x
,
w
y
)
=
=
I
^
2
(
w
x
,
w
y
)
I
^
1
(
w
x
,
w
y
)
∗
∣
I
^
1
(
w
x
,
w
y
)
I
^
1
(
w
x
,
w
y
)
∗
∣
=
e
−
i
(
w
x
δ
x
+
w
y
δ
y
)
\hat{C o r r}=\frac{\hat{I}_{2}\left(w_{x}, w_{y}\right)}{\hat{I}_{1}\left(w_{x}, w_{y}\right)}==\frac{\hat{I}_{2}\left(w_{x}, w_{y}\right) \hat{I}_{1}\left(w_{x}, w_{y}\right) *}{\left|\hat{I}_{1}\left(w_{x}, w_{y}\right) \hat{I}_{1}\left(w_{x}, w_{y}\right) *\right|}=e^{-i\left(w_{x} \delta_{x}+w_{y} \delta_{y}\right)}
Corr^=I^1(wx,wy)I^2(wx,wy)==∣
∣I^1(wx,wy)I^1(wx,wy)∗∣
∣I^2(wx,wy)I^1(wx,wy)∗=e−i(wxδx+wyδy)
其中 ∗ * ∗表示复共轭。我们可以看到在简化后的归一化的交叉功率谱之间的关系,只有和初始位置以及移动来变化的。取傅里叶逆变换 C o r r ( x , y ) = F − 1 ( C o r r ^ ) = δ ( x − δ x , y − δ y ) Corr(x,y) = F^{−1}(\hat{Corr}) = δ (x −δ_x,y − δ_y) Corr(x,y)=F−1(Corr^)=δ(x−δx,y−δy),这意味着 C o r r ( x , y ) Corr(x,y) Corr(x,y)仅在 ( δ x , δ y ) = a r g max x , y { C o r r ( x , y ) } (δ_x,δ_y) =arg \max_{x,y}\{Corr(x,y)\} (δx,δy)=argmaxx,y{Corr(x,y)}为非零。

