
- 1stm32单片机智能家居智能窗帘控制系统Proteus仿真全套资料_keil5arm、stm32cubemx、proteus 8 实现弄的智能家居主要技术
- 2Mac-iTerm2安装、配置和使用_mac安装iterm2
- 3io.net Windows保姆教程,手把手教你如何用Bitget部署撸空投_ionet教程
- 4【参数辨识】基于卡尔曼滤波EKF的多旋翼无人机模型参数辨识Matlab和simulink复现
- 5基于JAVA+SpringBoot+Vue+uniApp小程序的心理健康测试平台
- 6智慧矿山:EasyCVR助力矿井视频多业务融合及视频转发服务建设
- 7数据结构之“栈”(全方位认识)
- 860、基于浅层神经网络的数据拟合(matlab)
- 9在gitee上部署静态html表白烟花页面,Gitee Go (持续集成)服务(保姆级图文+实现代码)【杂记】_gitee 部署html
- 10图像算法八 —— 多种边缘检测算法(Sobel算子、Isotropic Sobel算子、Roberts算子、Prewitt算子、Laplacian算子、Canny算子)介绍及比较_边缘检测算子
ESP32-C3开发之旅 基础篇6 ESP32-C3 SPI通信_fspihd
赞
踩
一、SPI 控制器 (SPI)
串行外设接口 (SPI) 是一种同步串行接口,可用于与外围设备进行通信。ESP32-C3 芯片集成了三个 SPI 控制器:
- SPI0
- SPI1
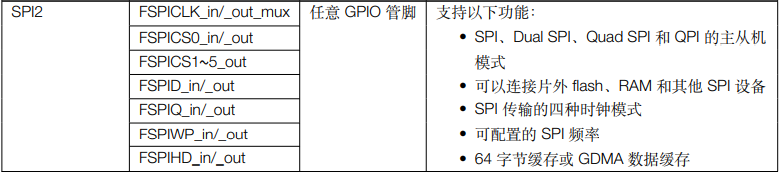
- 通用SPI2 即 GP-SPI2
SPI0 和 SPI1 控制器主要供内部使用。
二、特性
-
支持主机模式和从机模式
-
支持半双工通信和全双工通信
全双工:主机与从机之间的发送线和接收线各自独立,发送数据和接收数据同时进行。
半双工:主机和从机只能有一方先发送数据,另一方接收数据。发送数据和接收数据不能同时进行 -
支持 CPU 控制的传输模式以及 DMA 控制的传输模式
CPU 控制:由CPU 控制与 SPI 设备之间的数据传输。
DMA 控制:由DMA引擎控制,DMA 与 SPI 设备之间的数据传输。 -
支持多种数据模式
1-bit SPI 模式 :一个时钟周期传输一位数据。
2-bit Dual SPI 模式 :一个时钟周期传输两个数据位。
4-bit Quad SPI 模式 :一个时钟周期传输四个数据位。
QPI 模式 :一个时钟周期可传输四位命令、或四位地址、或四位数据。 -
时钟频率可配置
在主机模式下:时钟频率可达 80 MHz
在从机模式下:时钟频率可达 60 MHz -
数据长度可配置
在主机和从机 CPU 控制的传输模式下:数据长度为 1 ~ 64 B
在主机 DMA 控制的单次传输模式下:数据长度为 1 ~ 32 KB
在主机 DMA 控制的分段配置传输模式下:数据长度字节数无限制
在从机 DMA 控制的单次或连续传输模式下:数据长度字节数无限制 -
四种 SPI 时钟模式:模式 0 ~ 模式 3
-
在主机模式下,提供六条 CS 线:CS0 ~ CS5
-
支持访问 SPI 接口的传感器、显示屏控制器、flash 或 RAM 芯片

GP-SPI2 通过以下方式与 SPI 设备进行数据交换:
在 CPU 控制的传输模式下:CPU <-> GP-SPI2 <-> SPI 设备
在 DMA 控制的传输模式下:GDMA <-> GP-SPI2 <-> SPI 设备
GP-SPI2 输入输出信号的前缀为 “FSPI”。FSPI 总线信号可通过 GPIO 交换矩阵或 IO MUX 与 GPIO 管脚相连。
如下图可看出:
GPIO2 :FSPIQ
GPIO4 :FSPIHD
GPIO5 :FSPIWP
GPIO6 :FSPICLK
GPIO7 :FSPICD
GPIO10 :FSPICS0



驱动强度
“驱动强度” 一栏所示为每个管脚复位后的默认驱动强度。
• 0 - 驱动电流 = ~5 mA
• 1 - 驱动电流 = ~10 mA
• 2 - 驱动电流 = ~20 mA
• 3 - 驱动电流 = ~40 mA
复位
“复位” 一栏所示为每个管脚复位后的默认配置。
• 0 - IE = 0(输入关闭)
• 1 - IE = 1(输入使能)
• 2 - IE = 1,WPD = 1(输入使能,下拉电阻使能)
• 3 - IE = 1,WPU = 1 (输入使能,上拉电阻使能)
• 4 - OE = 1, WPU = 1(输出使能,上拉电阻使能)
• 0* - IE = 0,WPU = 0,GPIO19 的 USB 上拉默认值为 1,因此,其上拉电阻使能,具体见说明。
• 1* - 如果 EFUSE_DIS_PAD_JTAG = 1,则 MTCK 管脚复位后浮空,即 IE = 1。如果EFUSE_DIS_PAD_JTAG= 0,则 MTCK 管脚连接内部上拉电阻,即 IE = 1,WPU = 1。
说明
• R - 代表位于 VDD3P3_RTC 电源域的管脚,部分具有模拟功能,见表 5-4。
• USB - GPIO18、GPIO19 为 USB 管脚。USB 管脚的上拉控制由管脚上拉和 USB 上拉共同控制。当其中任意一个为 1 时,对应管脚上拉电阻使能。USB 上拉值对应寄存器 USB_SERIAL_JTAG_DP_PULLUP。
• G - 管脚在芯片上电过程中有毛刺

ms是毫秒=0.001秒
us是微秒=0.000001秒
ns是纳秒=0.000000001秒
如下图所示,ESP32-C3做主站使用可以控制6个从站,作为从站使用只能与一个主站通讯

三、配置主站模式
清零 SPI_SLAVE_REG 中 SPI_SLAVE_MODE 位可将 GP-SPI2 配置成主机模式。在这种模式下,GP-SPI2 提供时钟信号(GP-SPI2 模块时钟的分频时钟)和六条 CS 线 (CS0 ~ CS5)
四、应用示例
以下示例展示了 GP-SPI2 如何在主机半双工模式下访问 flash 和外部 RAM。

五、从机模式
GP-SPI2 可用作从机与另一 SPI 主机进行通信。用作从机时,GP-SPI2 支持特定格式的 1-bit SPI、2-bit Dual SPI、4-bit Quad SPI 和 QPI 模式。用户可置位寄存器 SPI_SLAVE_REG 中 SPI_SLAVE_MODE 位使能 GP-SPI2 从机模式。
在传输过程中,CS 信号应保持低电平,CS 信号的下降沿和上升沿代表一次传输的开始和结束。数据以字节为单位进行传输,否则多余的位将丢失。此处多余的位表示总位长对 8 取模的结果。
六、代码测试。
时钟信号由主机产生,从机不用配置。但主机的SPI时钟频率应该在从机允许的处理速度范围内。
#define SPI2_FUNC_NUM 2
#define SPI2_IOMUX_PIN_NUM_MISO 2
#define SPI2_IOMUX_PIN_NUM_HD 4
#define SPI2_IOMUX_PIN_NUM_WP 5
#define SPI2_IOMUX_PIN_NUM_CLK 6
#define SPI2_IOMUX_PIN_NUM_MOSI 7
#define SPI2_IOMUX_PIN_NUM_CS 10
#define SPI_CLOCK_DIV2 0x00101001 // 8 MHz
#define SPI_CLOCK_DIV4 0x00241001 // 4 MHz
#define SPI_CLOCK_DIV8 0x004c1001 // 2 MHz
#define SPI_CLOCK_DIV16 0x009c1001 // 1 MHz
#define SPI_CLOCK_DIV32 0x013c1001 // 500 KHz
#define SPI_CLOCK_DIV64 0x027c1001 // 250 KHz
#define SPI_CLOCK_DIV128 0x04fc1001 // 125 KHz
static const int spiClk = 1000000; // 1 MHz
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
未完待续

