
- 1[论文笔记] CT数据配比方法论——1、Motivation
- 2学大数据开发要掌握的基础知识有哪些?_大数据开发 学习
- 3利用AI大模型,将任何文本语料转化为知识图谱,可本地运行!_ai生成知识图谱
- 4python中 TypeError: ‘XXX‘ object is not callable报错原因_kivy typeerror: 'button' object is not callable
- 5maven国内镜像及配置方法_maven 镜像
- 6java对接阿里云通义千问API_通义千问api文档
- 7SQL Server 数据误删的恢复
- 8常用的加密算法_纯数字加密算法
- 9浏览器内核,chrominum = blink = webkit+_blink内核
- 10网络工程实训(安全方向)1:网络通信体系结构_通信工程 网络架构基础 csdn
【ROS2】高级:安全-检查网络流量
赞
踩
目标:捕获和检查原始 ROS 2 网络流量。
教程级别:高级
时间:20 分钟
内容
概述
先决条件
运行演示
安装
tcpdump启动说话者和听者
显示未加密的发现数据包
显示未加密的数据包
启用加密
显示加密的发现数据包
显示加密数据包
概述
ROS 2 通信安全是关于保护节点之间的通信。之前的教程启用了安全性,但你如何真正判断流量是否被加密?在本教程中,我们将通过捕获实时网络流量来展示加密和未加密流量之间的区别。
注意
rmw_fastrtps_cpp 默认使用共享内存传输https://fast-dds.docs.eprosima.com/en/latest/fastdds/transport/shared_memory/shared_memory.html ,以提高端点在同一主机系统中时传输层的性能。安全飞地仍然适用,数据将被加密。但是,您无法捕获实时网络流量,因为数据不会出现在网络接口上。如果您使用 rmw_fastrtps_cpp ,则需要通过本教程并在发布者和订阅者之间使用不同的主机系统,或者通过启用 UDP 传输 https://fast-dds.docs.eprosima.com/en/latest/fastdds/transport/udp/udp.html#enabling-udp-transport 和设置 Fast-DDS XML 配置 https://github.com/ros2/rmw_fastrtps#full-qos-configuration 来禁用共享内存传输。
先决条件
本指南仅在 Linux 上运行,并假设您已安装 ROS 2。
运行演示
安装 tcpdump
在新的终端窗口中开始安装 tcpdump https://www.tcpdump.org/manpages/tcpdump.1.html ,这是一个用于捕获和显示网络流量的命令行工具。虽然本教程描述了 tcpdump 命令,您也可以使用 Wireshark https://www.wireshark.org/ ,这是一个类似的图形工具,用于捕获和分析流量。
- sudo apt update
- sudo apt install tcpdump
在单台机器上通过多个 ssh 会话运行以下命令。
启动说话者和听者
请重新启动讲述者和监听器,每个在自己的终端中。安全环境变量未设置,因此这些会话未启用安全性。
- # Disable ROS Security for both terminals
- unset ROS_SECURITY_ENABLE
-
-
- # In terminal 1:
- ros2 run demo_nodes_cpp talker --ros-args --enclave /talker_listener/talker
-
-
- # In terminal 2:
- ros2 run demo_nodes_cpp listener --ros-args --enclave /talker_listener/listener
显示未加密的发现数据包
在运行对话者和监听器的情况下,打开另一个终端并启动 tcpdump 以查看网络流量。由于读取原始网络流量是特权操作,因此需要使用 sudo 。
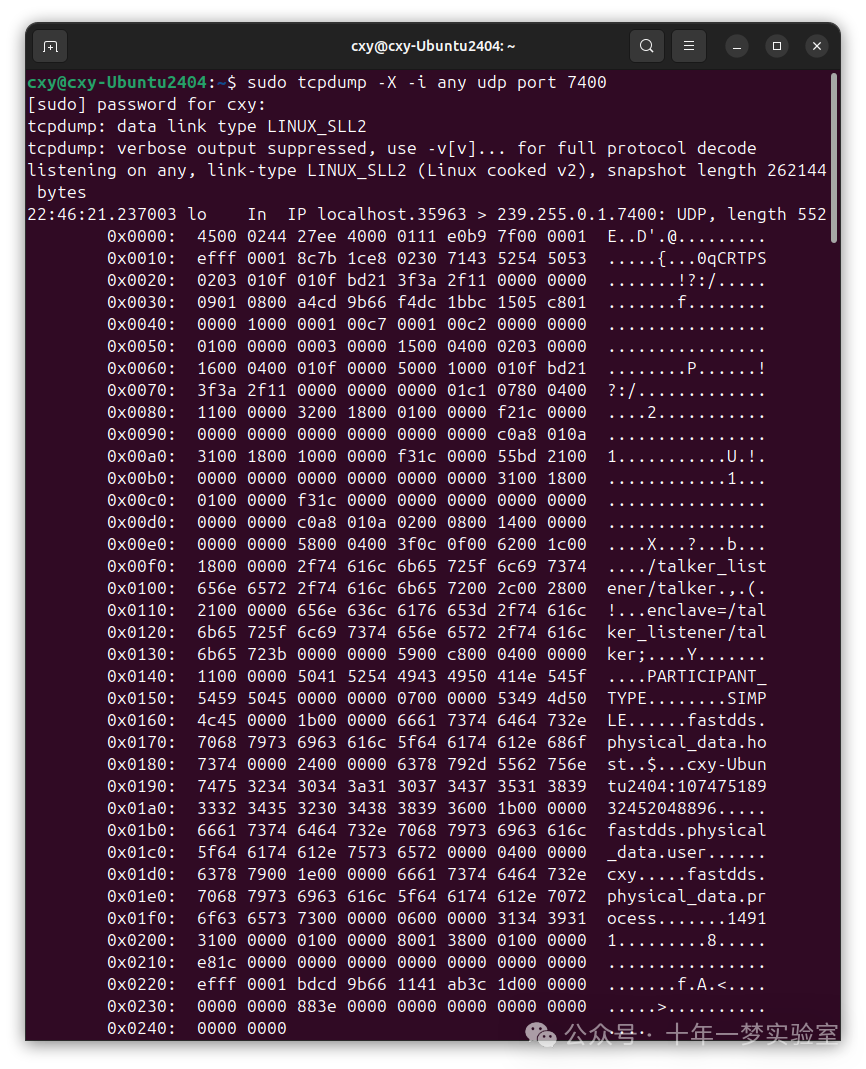
下面的命令使用 -X 选项打印数据包内容,使用 -i 选项监听任何接口上的数据包,并且只捕获 UDP 7400 端口 https://en.wikipedia.org/wiki/User_Datagram_Protocol 的流量。
sudo tcpdump -X -i any udp port 7400你应该看到如下的数据包:
- 20:18:04.400770 IP 8_xterm.46392 > 239.255.0.1.7400: UDP, length 252
- 0x0000: 4500 0118 d48b 4000 0111 7399 c0a8 8007 E.....@...s.....
- 0x0010: efff 0001 b538 1ce8 0104 31c6 5254 5053 .....8....1.RTPS
- ...
- 0x00c0: 5800 0400 3f0c 3f0c 6200 1c00 1800 0000 X...?.?.b.......
- 0x00d0: 2f74 616c 6b65 725f 6c69 7374 656e 6572 /talker_listener
- 0x00e0: 2f74 616c 6b65 7200 2c00 2800 2100 0000 /talker.,.(.!...
- 0x00f0: 656e 636c 6176 653d 2f74 616c 6b65 725f enclave=/talker_
- 0x0100: 6c69 7374 656e 6572 2f74 616c 6b65 723b listener/talker;
- 0x0110: 0000 0000 0100 0000 ........
这是一个发现数据报——发言者正在寻找订阅者。正如您所看到的,节点名称( /talker_listener/talker )和飞地(也是 /talker_listener/talker )以纯文本形式传递。您还应该看到来自 listener 节点的类似发现数据报。典型发现数据包的其他一些功能:
目标地址是 239.255.0.1,这是一个多播 IP 地址;ROS 2 默认使用多播流量进行发现。
UDP 7400 是目标端口,根据 DDS-RTPS 规范。https://www.omg.org/spec/DDSI-RTPS/About-DDSI-RTPS/
数据包包含“RTPS”标签,也如 DDS-RTPS 规范中定义的那样。
显示未加密的数据包
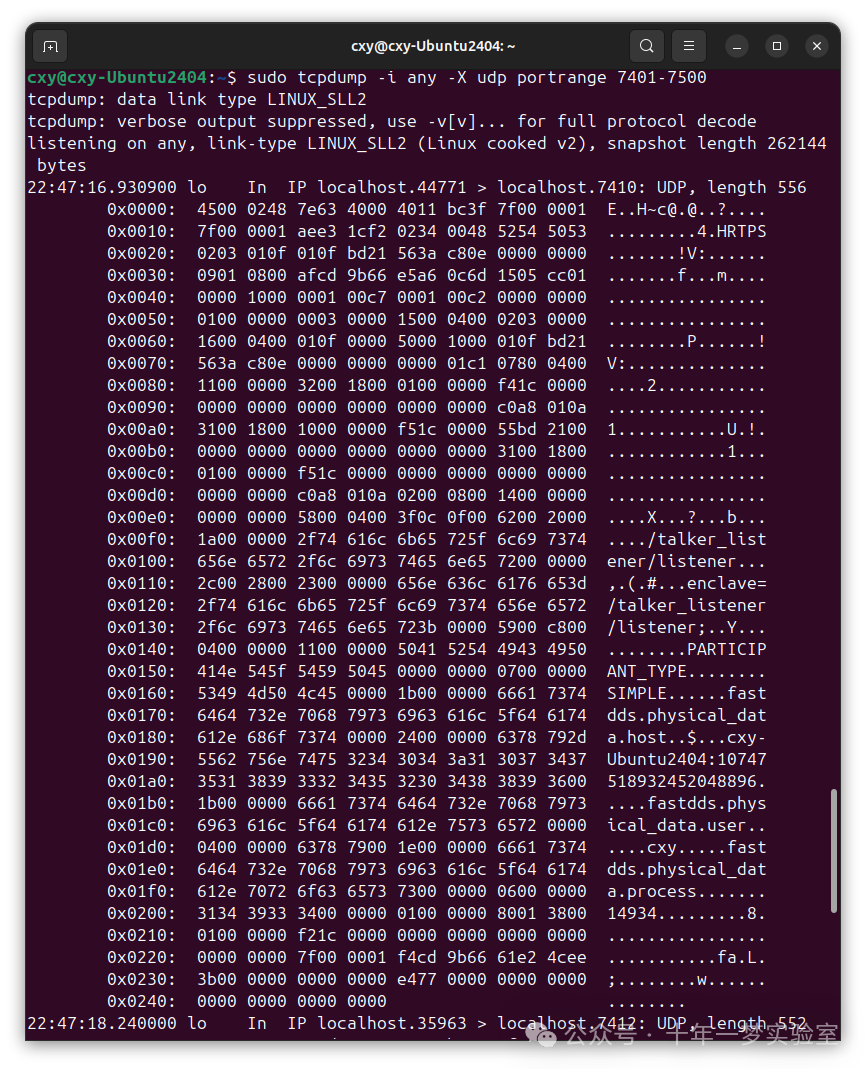
使用 tcpdump 通过过滤 7400 以上的 UDP 端口来捕获非发现 RTPS 数据包
sudo tcpdump -i any -X udp portrange 7401-7500你会看到几种不同类型的数据包,但请注意以下明显是从讲话者发送到听众的数据包:
- 20:49:17.927303 IP localhost.46392 > localhost.7415: UDP, length 84
- 0x0000: 4500 0070 5b53 4000 4011 e127 7f00 0001 E..p[S@.@..'....
- 0x0010: 7f00 0001 b538 1cf7 005c fe6f 5254 5053 .....8...\.oRTPS
- 0x0020: 0203 010f 010f 4874 e752 0000 0100 0000 ......Ht.R......
- 0x0030: 0901 0800 cdee b760 5bf3 5aed 1505 3000 .......`[.Z...0.
- 0x0040: 0000 1000 0000 1204 0000 1203 0000 0000 ................
- 0x0050: 5708 0000 0001 0000 1200 0000 4865 6c6c W...........Hell
- 0x0060: 6f20 576f 726c 643a 2032 3133 3500 0000 o.World:.2135...
关于此数据包的一些功能:
消息内容“Hello World: 2135”以明文发送
源和目标 IP 地址是
localhost:由于两个节点都在同一台机器上运行,节点在localhost接口上发现了彼此
启用加密
停止讲者和监听器节点。通过设置安全环境变量为两者启用加密,然后重新运行它们。
- # In terminal 1:
- export ROS_SECURITY_KEYSTORE=~/sros2_demo/demo_keystore
- export ROS_SECURITY_ENABLE=true
- export ROS_SECURITY_STRATEGY=Enforce
- ros2 run demo_nodes_cpp talker --ros-args --enclave /talker_listener/talker
-
-
- # In terminal 2:
- export ROS_SECURITY_KEYSTORE=~/sros2_demo/demo_keystore
- export ROS_SECURITY_ENABLE=true
- export ROS_SECURITY_STRATEGY=Enforce
- ros2 run demo_nodes_cpp listener --ros-args --enclave /talker_listener/listener
显示加密的发现数据包
运行之前使用的相同 tcpdump 命令,以检查启用加密的发现流量的输出:
sudo tcpdump -X -i any udp port 7400典型的发现数据包看起来如下所示:
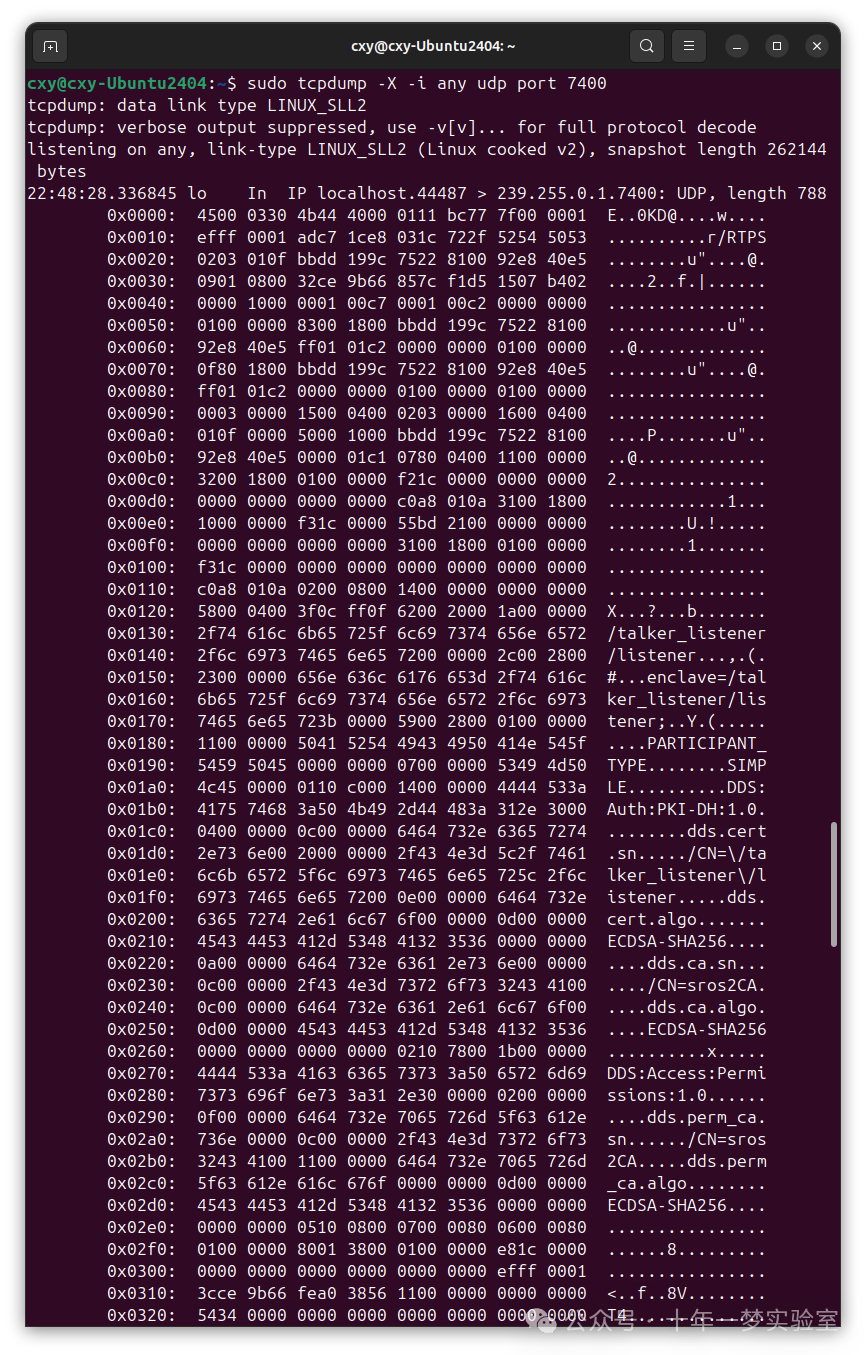

这个数据包要大得多,并且包含可用于在 ROS 节点之间设置加密的信息。正如我们很快将看到的那样,这实际上包括一些在我们启用安全性时创建的安全配置文件。想了解更多吗?看看优秀的论文《安全 DDS 系统的网络侦察和漏洞挖掘》 https://arxiv.org/abs/1908.05310 以了解为什么这很重要。
显示加密数据包
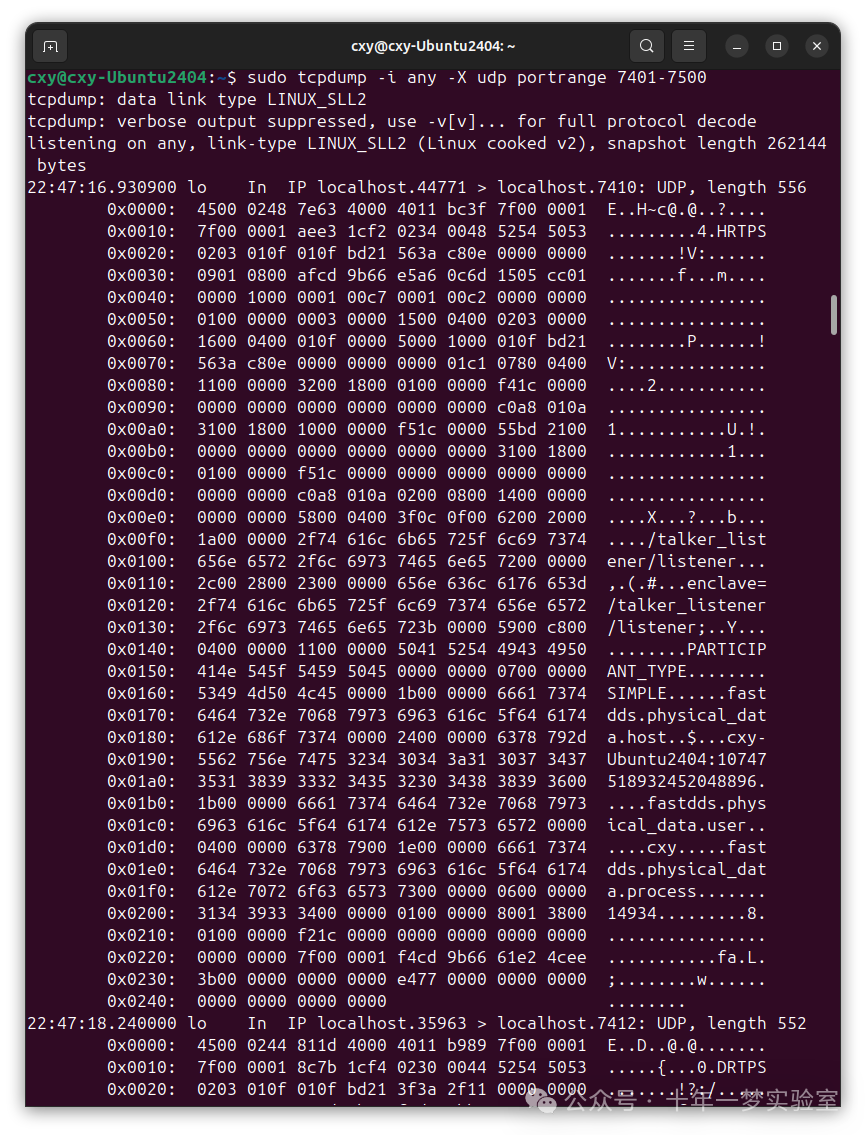
现在使用 tcpdump 来捕获数据包:
sudo tcpdump -i any -X udp portrange 7401-7500一个典型的数据包如下所示:
- 21:18:14.531102 IP localhost.54869 > localhost.7415: UDP, length 328
- 0x0000: 4500 0164 bb42 4000 4011 8044 7f00 0001 E..d.B@.@..D....
- 0x0010: 7f00 0001 d655 1cf7 0150 ff63 5254 5053 .....U...P.cRTPS
- 0x0020: 0203 010f daf7 10ce d977 449b bb33 f04a .........wD..3.J
- 0x0030: 3301 1400 0000 0003 492a 6066 8603 cdb5 3.......I*`f....
- 0x0040: 9df6 5da6 8402 2136 0c01 1400 0000 0000 ..]...!6........
- 0x0050: 0203 010f daf7 10ce d977 449b bb33 f04a .........wD..3.J
- ...
- 0x0130: 7905 d390 3201 1400 3ae5 0b60 3906 967e y...2...:..`9..~
- 0x0140: 5b17 fd42 de95 54b9 0000 0000 3401 1400 [..B..T.....4...
- 0x0150: 42ae f04d 0559 84c5 7116 1c51 91ba 3799 B..M.Y..q..Q..7.
- 0x0160: 0000 0000 ....
RTPS 数据包中的所有数据都是加密的。
除了这个数据包之外,您还应该看到带有节点和飞地名称的其他数据包;这些支持其他 ROS 功能,例如参数和服务。这些数据包的加密选项也可以由安全策略控制。

