
- 1C++——STL算法_c++ stl算法
- 2tkinter打造三维绘图系统,附源代码_tkinter 3d
- 3VUE ELE-UI 最简单设置组件对话框_elvui聊天框底部信息栏
- 4CuteHttpFileSever使用指南_cute file
- 5idea远程debug调试_win的idea;连接liunx服务器debug测试
- 6Docker容器 || MySQL容器时间与宿主机同步
- 7我的“大学生创新创业训练项目”_大学生创新创业大赛小程序开发
- 8MySQL导入数据库1118错误解决方案[ERR] 1118 - Row size too large (> 8126). Changing some columns to TEXT or BLOB_[err] 1118 - row size too large (> 8126). changing
- 951单片机智能小车蓝牙_c51连接jdy31
- 10Redis哨兵模式搭建
一分钟上手安信可雷达模组Rd-03_xend101mm01
赞
踩
Rd-03快速入手
Rd-03模组可感知区域内是否有运动或者微动的人体,实现实时检测结果。提供可视化的配置工具,可轻松配置感应距离范围、不同区间的感应灵敏度和无人延时时间等。
入手之前先下载好相应的可视化工具,可在安信可官网下载:Rd-03模组
前期准备
硬件准备
| 物料 | 数量 | |
|---|---|---|
| Rd-03模组 | ------- | 1 |
| TTL | ------- | 1 |
| 杜邦线 | ------- | 若干 |
软件准备
Rd-03可视化工具:ICLM_XenD101MM01_HP02Tool
Rd-03共有五个管脚,搭配TTL使用,引脚接线如下
| Rd-03 | 接线 | TTL |
|---|---|---|
| 3.3V | ------- | 3.3V |
| GND | ------- | GND |
| OT1 | ------- | RXD |
| RX | ------- | TXD |
| OT2 | 不接线 | 检测结果输出,感应时输出高电平,未感应时输出低电平 |

配置教程
首先将与Rd-03完成接线的TTL接入电脑端口,打开Rd-03的可视化工具。
注意:可视化工具和串口调试工具不能同时使用。
可视化工具界面可以分为三个区域:
1.设备操作区域(Zone1)
2.功能按钮区域(Zone2)
3.功能页面区域(Zone3)

点击设备操作区域的“刷新”,“串口号”选择雷达模组所在的串口号,“波特率”选择115200后,点击“连接设备”按钮开始连接可视化工具和雷达模组。
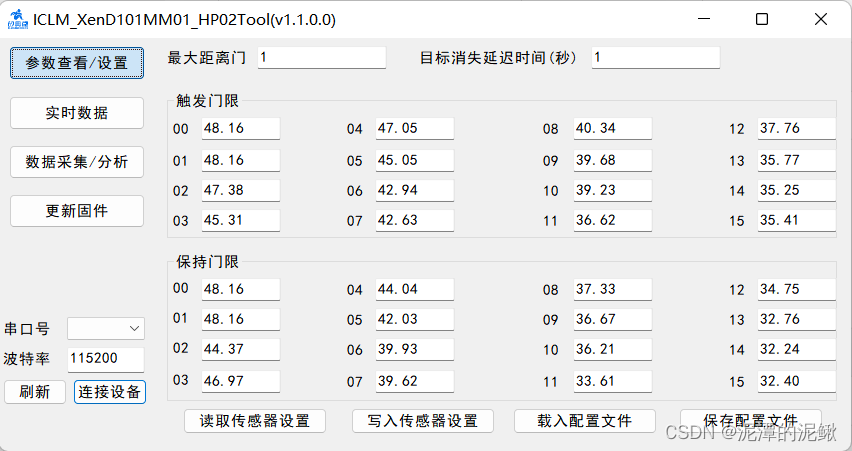
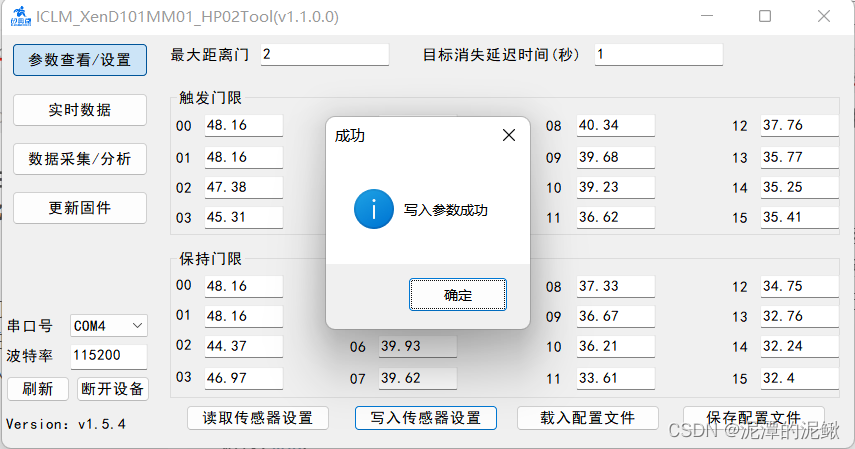
设备连接后点击功能按钮区域下的“参数查看/设置”按钮,可在”功能页面区域“查看当前模组的设置参数,若要修改参数可直接在对应的方框内输入所需要的参数,而后点击“写入传感器设置”,页面会弹出“写入参数成功”提示窗口,点击“确定”完成参数设置。点击“读取传感器设置“则会显示当前雷达的参数设置。
可视化工具的参数解释表如下
| 参数名称 | 解释 | 参数范围 |
|---|---|---|
| 最大距离门 | 雷达的最远有效探测距离,一个距离门的长度为70cm | 0~15 |
| 目标消失延迟时间 | 雷达从检测到有人到切换无人的延迟时间,在这段时间内若持续检测到有人将重新计时,直到无人状态持续一段完整的延迟时间,单位为秒 | 0~65535 |
| 触发门限 | 用于设置无人状态到有人状态的能量值门限,可通过“生成门限”功能计算得到 | 0~65535 |
| 保持门限 | 用于检测人体微动和保持有人状态的能量值门限,可通过“生成门限”功能计算得到 | 0~65535 |
查看雷达数据
在配置完相应的雷达数据后,点击功能按钮区域的”实时数据“,在功能页面区域点击“开始”即可实时查看雷达数据。
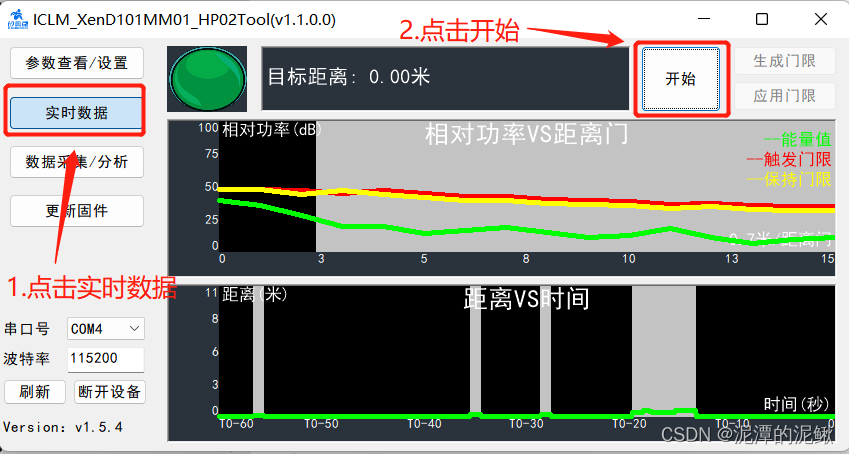
左上角的彩灯图标表示探测区域内有人/无人情况:雷达检测到人体存在时,彩灯为红色;没有检测到人体存在时,彩灯为绿色
彩灯后方的文本显示框显示雷达检测到的目标与雷达的径向距离
“开始/暂停”切换按钮用于开启和暂停雷达的检测
“生成门限”按钮用于扫描环境噪声并计算各个距离门的“触发门限”和“保持门限”
“应用门限”按钮用于将“生成门限”功能中得到的“触发门限”和“保持门限”发送给雷达
“相对功率VS距离门”折线图用于实时显示各个距离门的运动能量值(绿色折线),触发门限值(红色折线)和保持门限(黄色折线);黑色背景表示该距离门为有效探测范围,灰色背景表示该距离门为无效探测范围
“距离VS时间”折线图用于实时显示雷达检测到的目标人体在过去60秒内的距离变化;灰色背景区域表示雷达在该时间段检测到目标人体,黑色背景区域表示雷达在该时间段没有检测到目标人体
实例展示——模拟公共卫生间洗手台自动感应水龙头装置
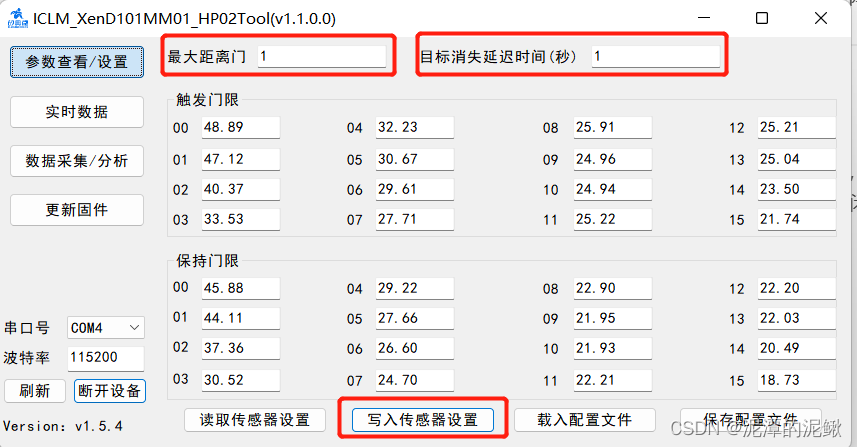
配置雷达参数
洗手台需要检测人体存在的距离相对较短,所以将参数的最大门限距离设置为1,也就是70cm的最大检测距离。为了避免浪费水资源的情况,目标消失延迟时间设置为1,也就是检测到人体离开后水再流动1秒关闭。
固定雷达位置,尽量使雷达感应周围空旷且雷达保持静止

可视化工具查看雷达数据:
模拟人体靠近洗手时触发雷达感应从而“打开水龙头”,当人体离开后雷达感应到无人状态继而"关闭水龙头"。
结语
Rd-03还有许多功能未展示,本次使用说明仅作为简单功能演示。
可以关注安信可官网了解更多关于雷达模组的信息。
官方网址: https://www.ai-thinker.com
开发DOCS:https://docs.ai-thinker.com
官方论坛: http://bbs.ai-thinker.com
技术支持:support@aithinker.com


