
- 1探索AI人才培养新范式,合合信息与同济大学软件学院签署产教融合人才培养协议
- 2数据结构——链表(C语言实现)_严蔚敏 数据结构 c语言代码 线性链表
- 3动态规划课堂5-----子序列问题(动态规划 + 哈希表)_子序列:是由数组派生而来的序列,删除(或不删除)数组中的元素而不改变其余元素的顺
- 4基于springboot实现秒杀系统项目【项目源码+论文说明】计算机毕业设计_基于springbiit的房产销售系统论文
- 5【已拿offer】最新AI产品经理大厂面经(含百度&腾讯&科大讯飞&商汤&蚂蚁金服)_商汤pk科大讯飞
- 6数字抽取滤波(一)
- 7基于小程序和SSM实现智能推荐的电影推荐_ssm框架 + 推荐算法 具体实现
- 8unity3D 插件plugins_managed plugins
- 9Linux安装Mysql详细教程(两种安装方法)_linux 安装mysql
- 10swift 3d v6.0汉化中文版_swift 3d软件
STM32-按键及传感器模块
赞
踩
本内容是基于江协科技STM32视频整理而得。
1. 按键及传感器模块
1.1 按键简介
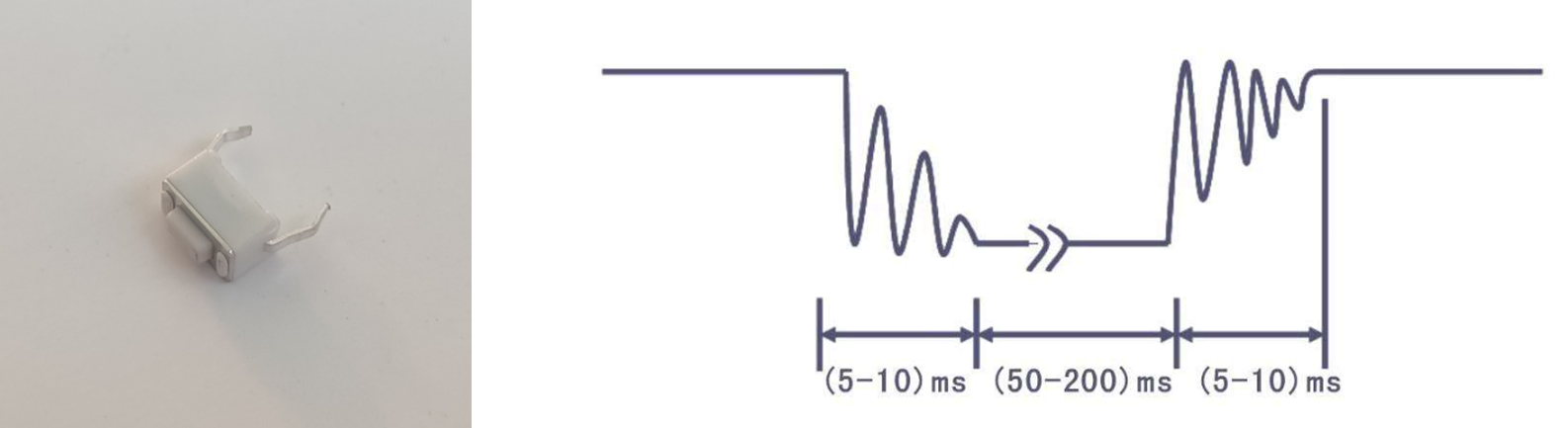
按键:常见的输入设备,按下导通,松手断开;
按键抖动:由于按键内部使用的是机械式弹簧片来进行通断的,所以在按下和松手的瞬间会伴随一连串的抖动;
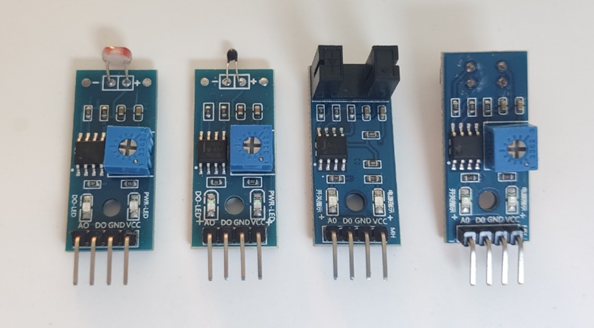
1.2 传感器模块简介
传感器模块:传感器元件(光敏电阻/热敏电阻/红外接收管等)的电阻会随外界模拟量的变化而变化,通过与定值电阻分压即可得到模拟电压输出,再通过电压比较器进行二值化即可得到数字电压输出。
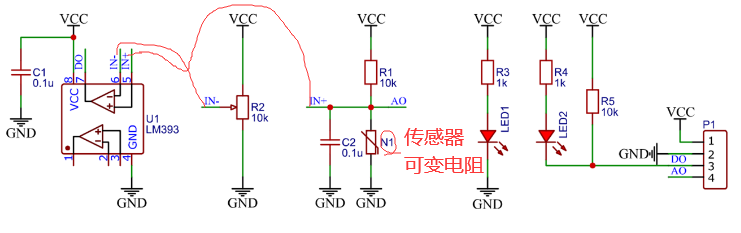
N1是传感器代表的可变电阻,其阻值可以根据环境的光线、温度等模拟量进行变化。
C2是一个滤波电容,是为了给中间的电压输出进行滤波的,用来滤除一些干扰,保证输出电压波形的平滑。
R1是和N1进行分压的定值电阻,R1和N1串联,一端连接在VCC正极,一端接在GND负极,构成基本的分压电路。
当N1阻值变小时,下拉作用就会增强,中间的AO端的电压就会拉低,极端情况下,N1阻值为0,AO输出被完全下拉,输出0V。当N1阻值变大,下拉作用就会减弱,中间的引脚由于R1的上拉作用,电压就会升高,极端情况下,N1阻值无穷大,相当于断路,输出电压被R1拉高至VCC。AO是模拟电压输出,就直接通过排针输出了。
数字输出就是对AO进行二值化的输出,二值化是通过芯片LM393完成的,LM393是一个电压比较器芯片,里面有两个独立的电压比较器电路。VCC接到了电路的VCC,GND接到了电路的GND。C1是一个电源供电的滤波电容。电压比较器就是一个运算放大器,当IN+>IN- 时,输出接VCC,IN+<IN-时,输出接GND。
IN-接了一个电位器,这个电位器的接法也是分压电阻的原理,拧动电位器,IN-就会生成一个可调的阈值电压。
LED1是电源指示灯,LED2是DO输出电平指示灯,低电平点亮,高电平熄灭,R5上拉电阻是为了保证默认输出高电平的。
1.2.1 光敏电阻传感器
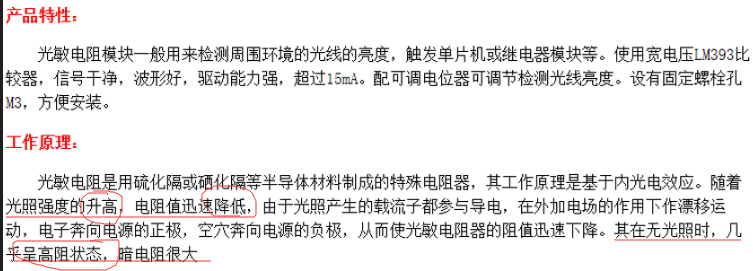
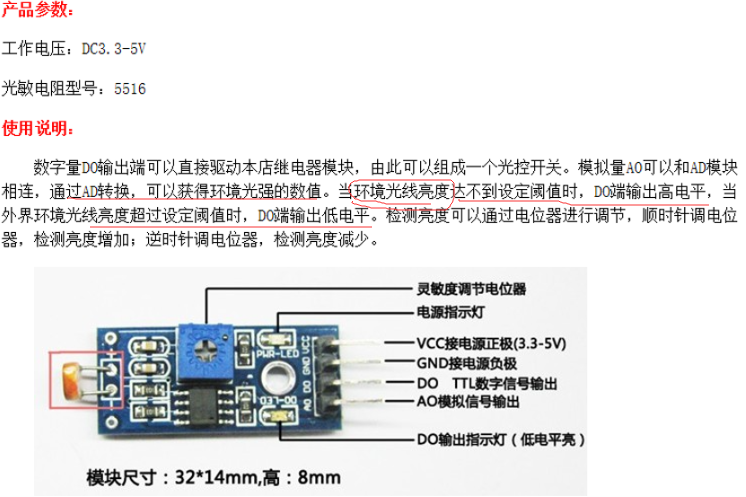
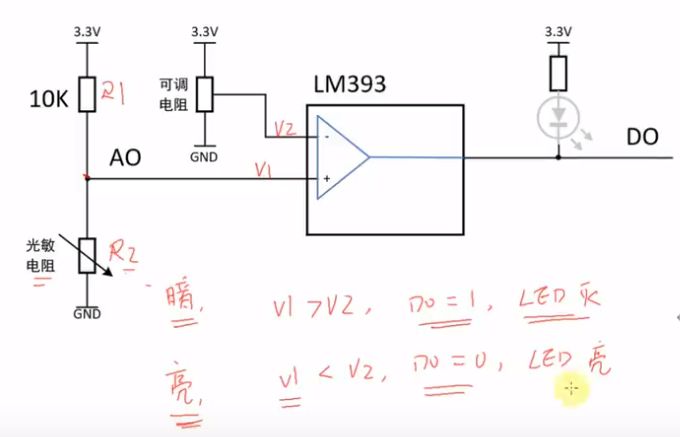
传感器电阻为光敏电阻时,光照强度降低,当无光照时,电阻呈高阻状态,IN+=VCC,IN+ > IN-,DO输出高电平;光照强度升高,电阻值降低,IN+=GND,IN+ < IN-,DO输出低电平。
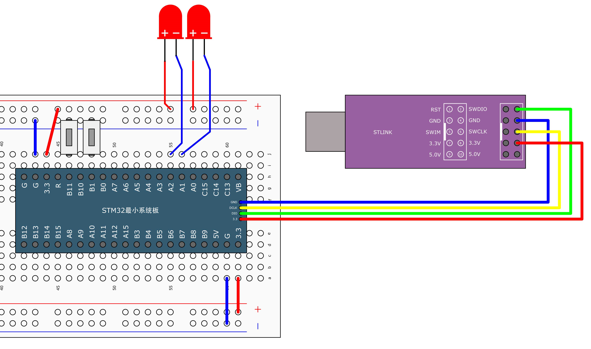
1.3 硬件电路
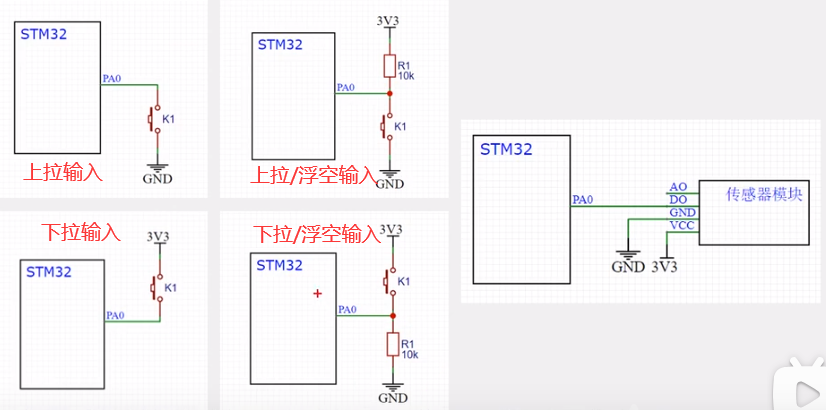
上面两种接法按键按下时引脚是低电平,松手是高电平,
下面两种接法按键按下时引脚是高电平,松手是低电平。
1.4 GPIO读取输出寄存器和读取输入寄存器的库函数
-
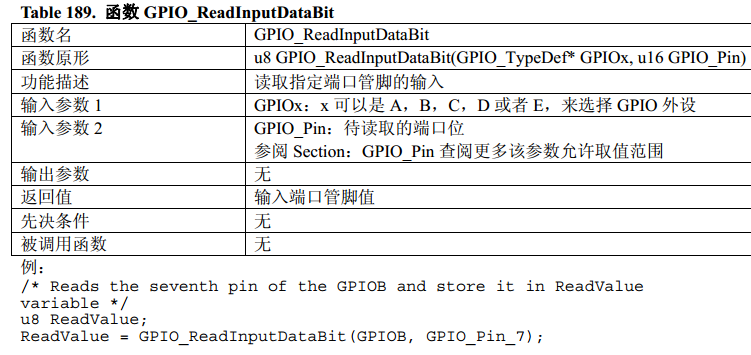
**uint8_t GPIO_ReadInputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);**用来读取输入数据寄存器某一个端口的输入值,返回值代表引脚的高低电平。
-
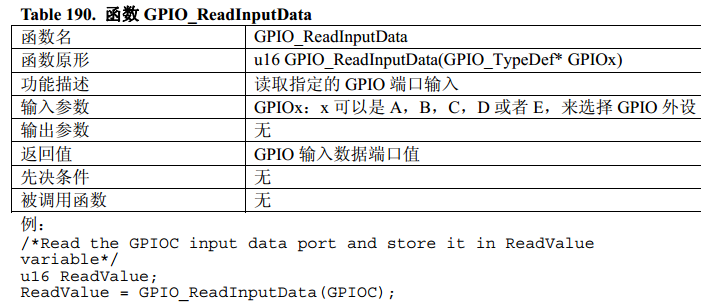
**uint16_t GPIO_ReadInputData(GPIO_TypeDef* GPIOx);**用来读取整个输入数据寄存器的,返回值是16位的,代表端口值
-
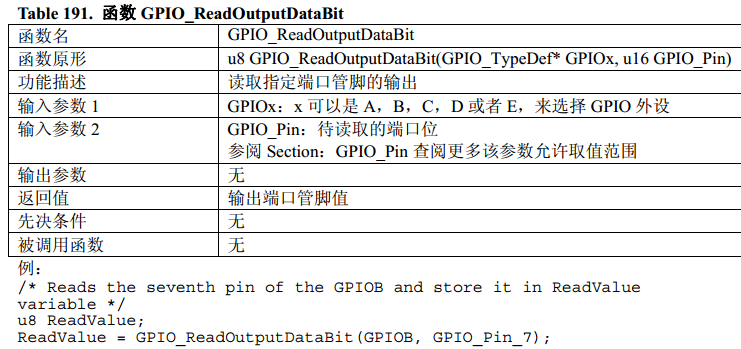
**uint8_t GPIO_ReadOutputDataBit(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);**用来读取输出数据寄存器的某一个位的,用于输出模式下,用来看一下输出的是什么。
-
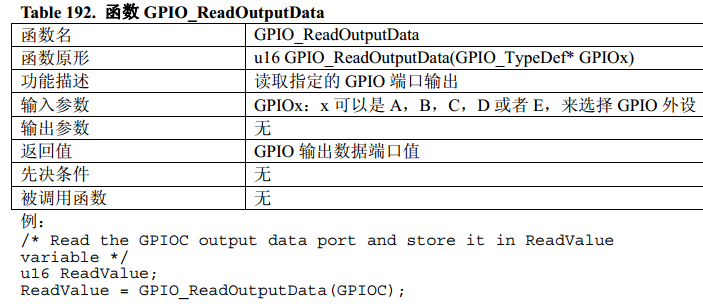
**uint16_t GPIO_ReadOutputData(GPIO_TypeDef* GPIOx);**用来读取整个输出数据寄存器的,
2. 按键控制LED代码
2.1 硬件连接
两个按键控制两个LED,KEY1控制LED1,KEY2控制LED2。实现功能:按键按下,LED亮,按键再按下,LED灭。
2.2 代码实现流程
- 按键代码:
- 初始化:开启GPIO时钟;初始化GPIO,引脚配置为上拉输入;
- 获取按键值:读PB1和PB11输入寄存器的值,若为0,则表明按键按下,设PB1的按键值为1,PB11的按键值为2;由于按键按下及按键松手都会有抖动,因此需要设置一段延时来进行消抖。
- LED代码:
- 初始化:开启GPIO时钟;初始化GPIO,引脚配置为推挽输出;
- 分别开启和关闭LED1和LED2:PA1和PA2为低电平时点亮LED;高电平时熄灭LED。
- LED状态翻转:获取PA1和PA2端口输出寄存器的状态,如果为0(即端口为低电平),则将其置高电平,否则,置低电平。(实现功能:如果现在LED是亮的,则按键按下,LED熄灭;如果LED是熄灭的,则按键按下,LED点亮)
2.4 代码
- 按键代码
#include "stm32f10x.h" // Device header #include "Delay.h" void Key_Init(void) { RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_11; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStructure); } uint8_t Key_GetNum(void) { uint8_t KeyNum = 0; // 读取PB1端口的值,返回值就是输入寄存器某一位的值,0代表低电平,1代表高电平 // 读取GPIO_Pin_1端口的值==0,就代表按键按下, if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0) { // 按键刚按下,会有个抖动,所以需要Delay一段时间, Delay_ms(20); // 检测一下按键松手的情况,因为按键一般是松手之后才会有动作的, // 如果按键一直按下,就卡在while循环里,直到松手, while (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0) // 松手之后再Delay_ms(20),消除按键松手的抖动 Delay_ms(20); KeyNum = 1;// 用变量将键码1传递出去 } if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11) == 0) { Delay_ms(20); while (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11) == 0) Delay_ms(20); KeyNum = 2; } return KeyNum; }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- LED代码
/*led代码*/ #include "stm32f10x.h" // Device header #include "Delay.h" void LED_Init(void) { RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_2; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA, &GPIO_InitStructure); } void LED1_ON(void) { GPIO_ResetBits(GPIOA, GPIO_Pin_1); } void LED1_OFF(void) { GPIO_SetBits(GPIOA, GPIO_Pin_1); } // LED的状态取反 void LED1_Turn(void) { // 调用GPIO_ReadOutputDataBit函数,读取当前的端口输出状态, // 当前输出0,就给它置1,否则就置0。这样就实现了端口的电平翻转 if (GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_1) == 0) { GPIO_SetBits(GPIOA, GPIO_Pin_1); } else { GPIO_ResetBits(GPIOA, GPIO_Pin_1); } } void LED2_ON(void) { GPIO_ResetBits(GPIOA, GPIO_Pin_2); } void LED2_OFF(void) { GPIO_SetBits(GPIOA, GPIO_Pin_2); } void LED2_Turn(void) { if (GPIO_ReadOutputDataBit(GPIOA, GPIO_Pin_2) == 0) { GPIO_SetBits(GPIOA, GPIO_Pin_2); } else { GPIO_ResetBits(GPIOA, GPIO_Pin_2); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
/*main代码*/ #include "stm32f10x.h" // Device header #include "Delay.h" #include "LED.h" #include "Key.h" uint8_t KeyNum; int main() { LED_Init(); Key_Init(); while(1) { // 实现按下按键,led亮,再按一下按键,led灭 KeyNum = Key_GetNum(); if (KeyNum == 1) { LED1_Turn(); } if (KeyNum == 2) { LED2_Turn(); } } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
3. 光敏传感器控制蜂鸣器代码
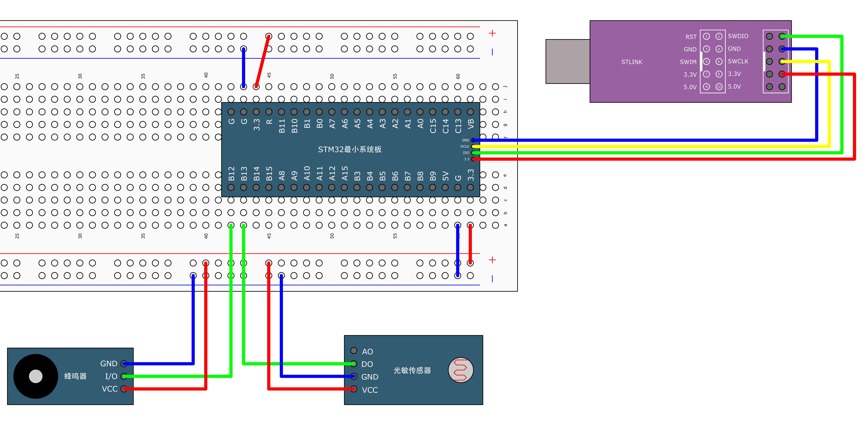
3.1 硬件连接
蜂鸣器I/O口接PB12,光敏传感器DO接PB13。
实现功能:光敏传感器被遮挡,输出1:蜂鸣器开启;否则,蜂鸣器关闭。
3.2 代码流程
- 光敏传感器代码:
- 开启GPIOB时钟,配置为上拉输入模式;
- 获取光敏传感器的输出的高低电平;有遮挡时,输出高电平,无遮挡时,输出低电平。
- 蜂鸣器代码:
- 开启GPIOB时钟,配置为推挽模式;
- 开启和关闭蜂鸣器:低电平开启蜂鸣器,高电平关闭蜂鸣器。
- 蜂鸣器状态翻转:蜂鸣器PB12输出寄存器状态为0,则将PB12设置为高电平;否则输出当期引脚输出高电平,则设置PB12为低电平。
3.3 代码
/*光敏传感器代码*/ /** * 函 数:光敏传感器初始化 * 参 数:无 * 返 回 值:无 */ void LightSensor_Init(void) { /*开启时钟*/ RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟 /*GPIO初始化*/ GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStructure); //将PB13引脚初始化为上拉输入 } /** * 函 数:获取当前光敏传感器输出的高低电平 * 参 数:无 * 返 回 值:光敏传感器输出的高低电平,范围:0/1 */ uint8_t LightSensor_Get(void) { return GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_13); //返回PB13输入寄存器的状态 }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
/*蜂鸣器代码*/ #include "stm32f10x.h" // Device header /** * 函 数:蜂鸣器初始化 * 参 数:无 * 返 回 值:无 */ void Buzzer_Init(void) { /*开启时钟*/ RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //开启GPIOB的时钟 /*GPIO初始化*/ GPIO_InitTypeDef GPIO_InitStructure; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOB, &GPIO_InitStructure); //将PB12引脚初始化为推挽输出 /*设置GPIO初始化后的默认电平*/ GPIO_SetBits(GPIOB, GPIO_Pin_12); //设置PB12引脚为高电平 } /** * 函 数:蜂鸣器开启 * 参 数:无 * 返 回 值:无 */ void Buzzer_ON(void) { GPIO_ResetBits(GPIOB, GPIO_Pin_12); //设置PB12引脚为低电平 } /** * 函 数:蜂鸣器关闭 * 参 数:无 * 返 回 值:无 */ void Buzzer_OFF(void) { GPIO_SetBits(GPIOB, GPIO_Pin_12); //设置PB12引脚为高电平 } /** * 函 数:蜂鸣器状态翻转 * 参 数:无 * 返 回 值:无 */ void Buzzer_Turn(void) { if (GPIO_ReadOutputDataBit(GPIOB, GPIO_Pin_12) == 0) //获取输出寄存器的状态,如果当前引脚输出低电平 { GPIO_SetBits(GPIOB, GPIO_Pin_12); //则设置PB12引脚为高电平 } else //否则,即当前引脚输出高电平 { GPIO_ResetBits(GPIOB, GPIO_Pin_12); //则设置PB12引脚为低电平 } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
/*main代码*/ #include "stm32f10x.h" // Device header #include "Delay.h" #include "Buzzer.h" #include "LightSensor.h" int main(void) { /*模块初始化*/ Buzzer_Init(); //蜂鸣器初始化 LightSensor_Init(); //光敏传感器初始化 while (1) { if (LightSensor_Get() == 1) //如果当前光敏输出1 { Buzzer_ON(); //蜂鸣器开启 } else //否则 { Buzzer_OFF(); //蜂鸣器关闭 } } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25


