
- 1数据结构学习(用c语言实现)_数据结构教程在生活如何使用程序实现应用c语言
- 2Tornado编译vxworks.bin镜像_tgtsvr.exe
- 3ebpf深入理解和应用介绍
- 4Bi-shoe and Phi-shoe LightOJ - 1370(欧拉函数)
- 5win10专业版“引用的账户已锁定,且可能无法登录”解决方案_引用的账户当前已锁定,且可能无法登录怎么办
- 6Python 爬虫框架 - PySpider
- 7【经验】Git|Windows下如何管理和部署多个Git账号的SSH密钥文件_windows identityfile git rsa
- 8XluaMVC和PureMVC的解析 (一)_pure xlua
- 9嵌入式学习笔记九—— C语言二维字符型数组和函数
- 10SQL Server 2014数据库远程访问设置方法_sql2014 tcp访问
基于MPC的圆形轨迹跟踪算法实现(以后轴为基准)_mpc模型预测控制跟踪圆
赞
踩
MPC跟踪轨迹圆形(以后轴为基准)
ID:7316706261992406
东方举重的紫薯
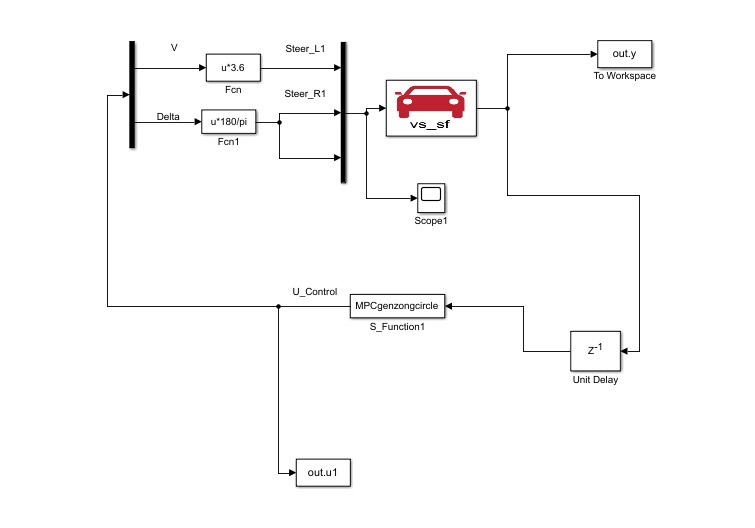
MPC(Model Predictive Control)是一种先进的控制方法,广泛应用于工业自动化领域。它可以通过建立数学模型来预测系统的动态行为,并根据这些预测结果来生成最优的控制策略。MPC跟踪轨迹圆形是MPC中的一个重要问题,尤其是在以后轴为基准的车辆控制中,它可以有效地实现车辆跟踪预设轨迹的要求。
首先,我们来了解一下MPC的基本原理。MPC通过对系统进行建模,得到系统的数学描述,并利用预测模型对系统的未来行为进行预测。然后,通过优化算法求解一个优化问题,得到在一定时间范围内的最优控制输入。最后,根据最优控制输入,实施控制动作。因此,MPC可以实现精确的控制目标,并兼顾系统的约束条件。
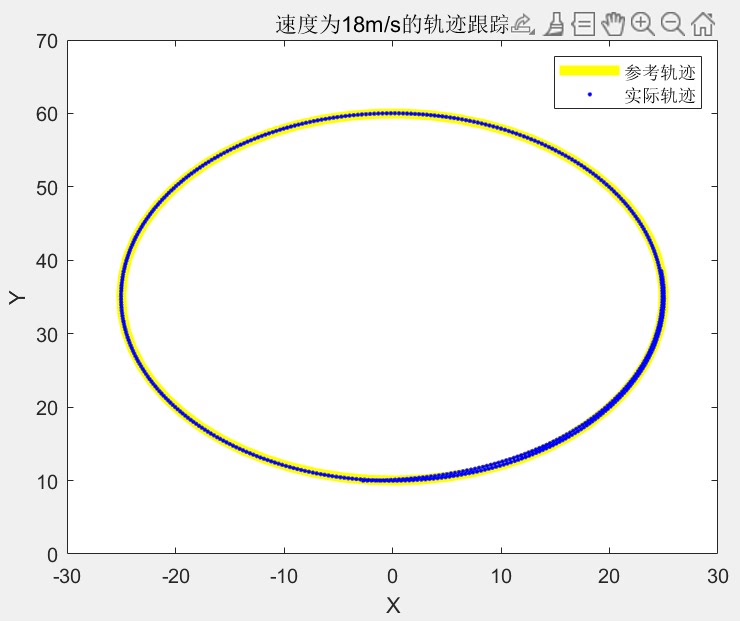
在MPC跟踪轨迹圆形问题中,我们需要将车辆的运动轨迹与预设的圆形轨迹进行匹配。具体来说,我们需要根据车辆的当前状态和预设的轨迹参数,计算出最优的控制输入,使车辆沿着圆形轨迹运动。为了实现这一目标,我们需要定义目标函数和约束条件,并利用优化算法求解最优控制输入。
在定义目标函数时,我们可以考虑车辆距离预设轨迹的偏差和车辆速度等因素。例如,我们可以将车辆与预设轨迹的距离最小化,并使车辆的速度尽可能接近预设速度。这样可以确保车辆能够准确地跟踪预设轨迹,并保持合适的速度。
在约束条件的设定上,我们需要考虑到车辆的动力学约束和控制输入的限制。例如,我们可以限制车辆的加速度和转角速度,以避免过大的控制输入造成不稳定或者超出系统能力。同时,我们还需要考虑到车辆动力学的特性,比如车辆的惯性、摩擦等,以便更准确地描述车辆的运动行为。
为了求解最优控制输入,我们可以采用数值优化算法,例如迭代法或者非线性规划算法。这些算法可以在一定的时间范围内,通过不断调整控制输入,逐步优化目标函数,直到达到最优解。在实际应用中,我们可以根据系统的实时状态更新优化算法,以适应不同的控制要求。
总结起来,MPC跟踪轨迹圆形是一种应用广泛的控制问题,特别适用于以后轴为基准的车辆控制。通过建立数学模型、定义目标函数和约束条件,并采用优化算法求解,可以实现车辆的精确跟踪预设轨迹。这种方法不仅能够满足系统的控制要求,还能够考虑到系统的约束条件和动态特性,具有较高的实时性和鲁棒性。在实际应用中,我们可以根据具体的控制需求和系统特性进行适当的调整和优化,以获得更好的控制效果。
【相关代码,程序地址】:http://fansik.cn/706261992406.html

