
热门标签
热门文章
- 1语音模块LD3320控制小车运动_ld3320和stm32语音小车
- 2Spark3.x入门到精通-阶段五(SparkStreaming详解原理&java&scala双语实战)_spark3 支持java语法嘛
- 3IO 流超级详细讲解_io流
- 4Hbase建表、删表慢的实例优化_hadoop创建表太慢
- 5【移动端开发】鸿蒙系统开发入门:代码示例与详解
- 6编译原理:短语、直接短语、句柄、素短语、最左素短语案例零基础解析
- 7【极数系列】Flink环境搭建&Docker版本(04)_docker部署flink
- 8MacOS安装反编译工具JD-GUI以及解决无法打开的问题_mac jd-gui
- 9代码的两种命名方法:驼峰命名、匈牙利命名(优缺点)
- 10LLM - 读取 Lora 模型进行文本生成_automodelforcausallm
当前位置: article > 正文
Camera-LIDAR 联合标定方法总结_线阵相机和结构光同时标定
作者:寸_铁 | 2024-07-09 04:18:53
赞
踩
线阵相机和结构光同时标定
项目需要融合雷达和相机,所以要做联合标定,记录下收集的标定方法。
一、总体标定步骤
标定就是找到雷达到相机的空间转换关系,在不同的坐标系之间转换需要旋转矩阵 R 和平移矩阵 T,为后续的雷达和相机数据融合做准备:
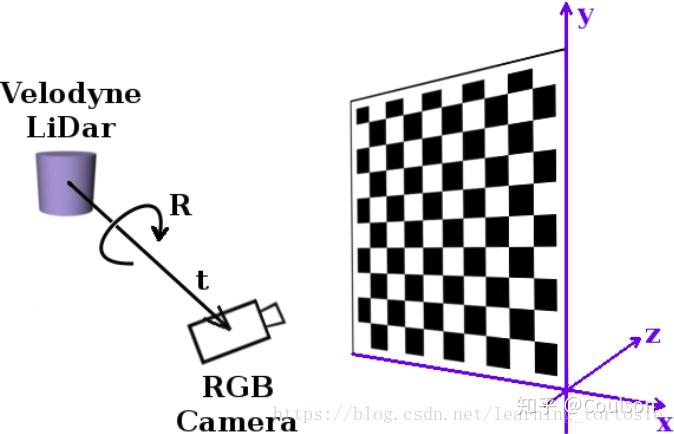
Camera-LIDAR 联合标定分为 2 步:
- 相机内参标定
- 雷达相机外参标定
相机内参标定方法
外参标定:lidar_camera_calibration
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/寸_铁/article/detail/801396
推荐阅读
相关标签

