
热门标签
热门文章
- 1麒麟系统操作系统-远程工具使用_银河麒麟开启远程桌面
- 2Unity相关链接_技能系统设计:技能模块同步的实现
- 3unity使用对象池实现冲锋留下的残影效果_u3d残影怎么做到的
- 4element ui——Pagination 自定义分页样式_elementui 分页自定义
- 5Vue el-table如何实现<el-table-column type=“selection“>单选_el-table-column type="selection
- 6OpenCV+python:直方图的概念及绘制(Histogram)_opencv histogram border
- 7Python—2023 |已有文章汇总 | 持续更新,直接看这篇就够了_女朋友的生日礼物能随便嘛?python小妙招:制作一款出圈九宫格抽奖小程序!!
- 8JAVA中生成随机数Random VS ThreadLocalRandom性能比较_java random效率
- 9Python练习——海龟绘图、输出四个矩形、螺旋形、蛇、太阳花_python turtle练习
- 10微信群发消息的三种操作,原来多群群发消息可以这样做_微信怎么群发到多个群
当前位置: article > 正文
基于halcon的3d点云识别定位_halcon 点云 提取圆心
作者:小丑西瓜9 | 2024-02-18 16:29:14
赞
踩
halcon 点云 提取圆心
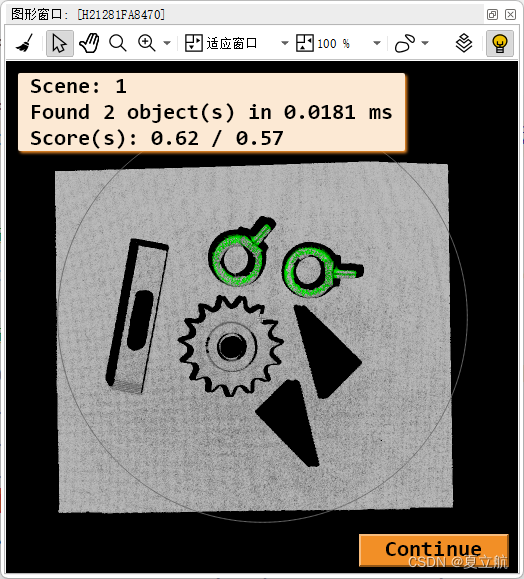
对一堆无序摆放的工件进行扫描 获取其3d点云图像

通过halcon预处理提取待测面

首先要单独筛选出单个工件 创建3d点云模板文件
然后统一模板点云和场景点云的法线方向
重点算子
统一法线方向
smooth_object_model_3d
创建基于表面的3d模板点云
create_surface_model
找模板
find_surface_model
创建模板和找模板中的两个参数 比较影响正确率
RelSamplingDistance 最大采样距离
KeyPointFraction 采样关键点
调整参数找到最好效果
最后达到同一高度下对不同摆放位姿的工件都能达到正确识别 并获取位姿信息
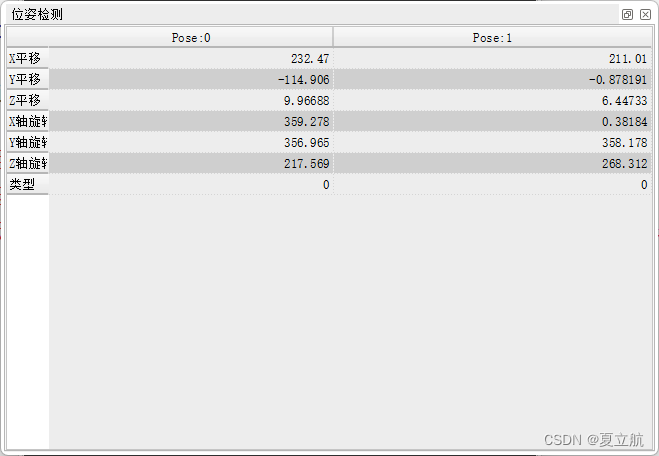
后续通过9点标定 图像坐标系和世界坐标系转换 配合机器手进行抓取
声明:本文内容由网友自发贡献,转载请注明出处:【wpsshop博客】
推荐阅读
相关标签

