
热门标签
当前位置: article > 正文
基于Arduino、ESP8266的物联网项目开发方案整理、毕业设计(第二波)_基于arduino和esp8266
作者:小丑西瓜9 | 2024-03-12 21:54:13
赞
踩
基于arduino和esp8266
1、背景
了解博哥的同学都知道,作为一名电子爱好者,博哥除了平时乐于分享基础知识之外,还需要肩负起减轻家庭负担的责任(毕竟从农村走出来的孩子)。
目前,一般加博哥好友的人大概可以分为两类:
- 学习知识(这一部分目前基本上都很
正常运转起来,更多人还是喜欢我的ESP8266开发系列,主要着重点在于基础) - 项目开发、毕业设计等(这一部分内容缺失,没有一系列的帖子去
记录过博哥有经历过哪些项目开发,不一定是我开发的。。。。)
所以,经过仔细考虑还是需要去介绍一下一些项目开发整理。
2、项目整理
主要分为几个项目:
- Home Office
- 仿生珊瑚
- 气体传感器
- 气体采集平台
2.1 Home Office —— 在家办公时调节休息的灯
2.1.1 功能介绍
- 0、用户A是个设计师,疫情在家工作也常常要加班。
大量的工作很容易让他烦躁并且缺乏休息(用户背景)。 - 1、当时间到达T1(hh1:mm1:ss1)时、表示上班时间到了。随着时间的推移,光线会慢慢变暗(
人工拉动窗帘或者遮挡光敏传感器)如果光敏电阻检测到环境暗,则灯环自动亮暖色(环境越暗灯环越亮)。//这里是避免由于忘记开灯,伤害眼睛 - 2、连续亮了t分钟后,灯变暗变绿色
呼吸灯效果, MP3模块播放音乐,提醒用户A休息。 - 3、 只有当人手摸着心率/心跳传感器,检测到稳定(舒畅的状态)时,心跳稳定且平静则恢复1中的暖光,这时重新计时t。//比如像我这种工作狂 灯一灭就想立刻重启继续,那就要心跳传感器给予验证,脉搏是OK的才行
- 4、需要去休息时,点击开关按钮, 灯进入休眠(关闭灯),到第二天的T2(hh2:mm2:ss2)再次开启。
- 5、测试的时候,T1和T2可以设置的间隔短一点,比如5分钟。
2.1.2 实物图片
1、1Arduino nano或uno
2、1DS3231时钟模块(含纽扣电池)
3、1光敏电阻(模块)
4、124位 WS2812LED灯环
5、1无源蜂鸣器/mp3模块
6、1心率传感器/心跳传感器
7、1*9v电池
8、其他可能需要的元器件(面包板、按钮、电阻、电容、导线等)




2.1.3 视频
演示视频暂时无法上传(需要的可以另外帖子留言)
2.1.4 源代码
#include <DS3231.h> #include <Wire.h> DS3231 Clock; bool Century=false; bool h12; bool PM; bool work_flag = 1; int flag = 0; //调试用 int second,minute,hour,date,month,year,temperature; #define USE_ARDUINO_INTERRUPTS true #include <PulseSensorPlayground.h> const int OUTPUT_TYPE = SERIAL_PLOTTER; const int PULSE_INPUT = A0; const int PULSE_BLINK = 13; // Pin 13 is the on-board LED const int PULSE_FADE = 5; const int THRESHOLD = 530; // Adjust this number to avoid noise when idle int BPM = 0; int old_min = 0; PulseSensorPlayground pulseSensor; #include <Adafruit_NeoPixel.h> #include "Arduino.h" #include "SoftwareSerial.h" #include "DFRobotDFPlayerMini.h" SoftwareSerial mySoftwareSerial(10, 11); // RX, TX DFRobotDFPlayerMini myDFPlayer; #define button_1 2 //按钮引脚 #define LED_PIN 7 //LED引脚 #define NUMPIXELS 24 //LED数量 #define Bright_PIN A1 //光感引脚 #define hode_time 1000 //闪烁速度调节 #define work_time_hour 16 //工作时间h #define work_time_min 10 //工作时间min #define wake_time_hour 9 //唤醒时间h #define wake_time_min 20 //唤醒时间min #define rest_time 1 //休息提醒时长间隔 #define rest_time_delay 15 //休息时长(单位S) int Set_BPM = 180; //设置舒缓心率 int Set_Min_BPM = 140; Adafruit_NeoPixel pixels(NUMPIXELS, LED_PIN, NEO_GRB + NEO_KHZ800); int LED_num = 24; int LED_flag = 0; bool play_flag = 1; int LED_Bright = 200; //LED亮度设置 0-255 unsigned long int cur_time = 0; //LED渐变初始时间 unsigned long int Readtime = 0; void setup() { Wire.begin(); // Clock.setSecond(50);//Set the second // Clock.setMinute(8);//Set the minute // Clock.setHour(0); //Set the hour // Clock.setDoW(4); //Set the day of the week // Clock.setDate(9); //Set the date of the month // Clock.setMonth(7); //Set the month of the year // Clock.setYear(20); //Set the year (Last two digits of the year) ReadDS3231(); old_min = minute; pixels.begin(); pixels.setBrightness(LED_Bright); mySoftwareSerial.begin(9600); Serial.println(); Serial.println(F("DFRobot DFPlayer Mini Demo")); Serial.println(F("Initializing DFPlayer ... (May take 3~5 seconds)")); if (!myDFPlayer.begin(mySoftwareSerial)) { //Use softwareSerial to communicate with mp3. Serial.println(F("Unable to begin:")); Serial.println(F("1.Please recheck the connection!")); Serial.println(F("2.Please insert the SD card!")); // while(true); } Serial.println(F("DFPlayer Mini online.")); myDFPlayer.volume(30); //Set volume value. From 0 to 30 Serial.begin(115200); pinMode(button_1,INPUT); //按钮设置为输入 pulseSensor.analogInput(PULSE_INPUT); pulseSensor.blinkOnPulse(PULSE_BLINK); pulseSensor.fadeOnPulse(PULSE_FADE); pulseSensor.setSerial(Serial); pulseSensor.setOutputType(OUTPUT_TYPE); pulseSensor.setThreshold(THRESHOLD); if (!pulseSensor.begin()) { for(;;) { digitalWrite(PULSE_BLINK, LOW); delay(50); digitalWrite(PULSE_BLINK, HIGH); delay(50); } } } /********按钮结构体*********/ struct Button{ int buttonState; //按钮状态变量 int lastButtonState = LOW; //按钮状态初始化 long lastDebounceTime = 0; //记录抖动变量 long debounceDelay = 50; //抖动时间变量50ms }; Button button1; //新建1个按钮 /********按钮消抖函数********/ bool GetButton(){ int reading = digitalRead(button_1); //读取I/O口状态 if(reading!=button1.lastButtonState){ //如果状态发生改变 button1.lastDebounceTime = millis();//更新时间 } //如果等待时间大于debounceDelay if((millis()-button1.lastDebounceTime)>button1.debounceDelay){ if(reading!=button1.buttonState){ //读取状态不等于按钮状态 button1.buttonState = reading; //更新buttonState } } button1.lastButtonState = reading; //更新lastButtonState return button1.lastButtonState; } void loop() { ReadDS3231(); Mode_Change(); //模式刷新 LED_Run(); //LED状态刷新 } void Mode_Change(){ if(millis() - Readtime > 1000){ Serial_OUT(); Readtime = millis(); ReadDS3231(); //获取时间 if(flag == 1 || hour > work_time_hour || (hour == work_time_hour && minute >= work_time_min)){ if(work_flag == 1){ Mode_1(); //工作时间内为模式1 // Serial.println("Mode_1"); if(GetButton()){ //如果按钮按下,进入睡眠模式 work_flag = 0; // Serial.println("GetButton()"); } } } else if(flag == 2 || hour > wake_time_hour || (hour = wake_time_hour && minute < wake_time_min )){ Mode_2(); //唤醒后切换为模式2 work_flag = 1; // Serial.println("Mode_2"); } if(flag == 3 || work_flag == 0){ //睡眠模式 Mode_3(); // Serial.println("Mode_3"); } } } void Mode_1(){ int x = minute - old_min; // Serial.println(x); ReadDS3231(); if(minute - old_min >= rest_time){ pulseSensor.begin(); //开始读取心率 Get_BPM(); if(play_flag == 1){ myDFPlayer.play(1); //Play the first mp3 play_flag = 0; } LED_flag = 2; if(Clock.getSecond() > rest_time_delay){ // if(BPM > Set_Min_BPM && BPM < Set_BPM){ old_min = minute; BPM = 0; } } else{ pulseSensor.pause(); //暂停读取心率 LED_flag = 1; myDFPlayer.stop(); //Play the first mp3 play_flag = 1; } } void Mode_2(){ pulseSensor.pause(); //暂停读取心率 work_flag = 1; LED_flag = 1; } void Mode_3(){ pulseSensor.pause(); //暂停读取心率 LED_flag = 0; } /********获取时间函数********/ void ReadDS3231(){ second=Clock.getSecond(); minute=Clock.getMinute(); hour=Clock.getHour(h12, PM); date=Clock.getDate(); month=Clock.getMonth(Century); year=Clock.getYear(); // temperature=Clock.getTemperature(); // Serial.print("20"); // Serial.print(year,DEC); // Serial.print('-'); // Serial.print(month,DEC); // Serial.print('-'); // Serial.print(date,DEC); // Serial.print(' '); // Serial.print(hour,DEC); // Serial.print(':'); // Serial.print(minute,DEC); // Serial.print(':'); // Serial.print(second,DEC); // Serial.print('\n'); // Serial.print("Temperature="); // Serial.print(temperature); // Serial.print('\n'); } /********LED状态刷新********/ void LED_Run(){ if(LED_flag == 0){ //灯灭 pixels.clear(); pixels.show(); } else if(LED_flag == 1){ //自动调整LED亮度 LED_Bright = map(analogRead(Bright_PIN),0,1024,0,255);//获取亮度 for(int m = 0; m < (LED_num+1); m++){ pixels.setPixelColor(m, pixels.Color(255, 255, 255)); } pixels.setBrightness(LED_Bright); //调节亮度 pixels.show(); //更新亮度 } else if(LED_flag == 2){ //LED闪烁提醒 cur_time = millis(); if((cur_time % (2*hode_time)) > hode_time){ //防阻塞LED闪烁 pixels.clear(); } else{ LED_Bright = map(analogRead(Bright_PIN),0,1024,0,255);//获取亮度 for(int m = 0; m < (LED_num+1); m++){ pixels.setPixelColor(m, pixels.Color(0, 255, 0)); pixels.setBrightness(LED_Bright); } } pixels.show(); } } void Get_BPM(){ delay(20); //pulseSensor.outputSample(); if (pulseSensor.sawStartOfBeat()) { BPM = pulseSensor.getBeatsPerMinute(); Serial.println(BPM); } } void Serial_OUT(){ Serial.print("Temperature="); Serial.print(temperature); Serial.print('\n'); Serial.print("20"); Serial.print(year,DEC); Serial.print('-'); Serial.print(month,DEC); Serial.print('-'); Serial.print(date,DEC); Serial.print(' '); Serial.print(hour,DEC); Serial.print(':'); Serial.print(minute,DEC); Serial.print(':'); Serial.print(second,DEC); Serial.print('\n'); int B = map(analogRead(Bright_PIN),0,1024,1024,0); Serial.print("Bright: "); Serial.print(B); Serial.print("\tBPM: "); Serial.println(BPM); BPM = random(60,200); Serial.println("--------------------------"); }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
2.2 仿生珊瑚
2.2.1 功能介绍

- 1、用户通过在触控板绘制上图“米”字所示的横线“一”,“|”,“╱”,“╲”这四个的任意一个,来控制圆盘上面的塑料柱。
- 2、举个例子,当客户绘制“一”后,就从如右上图这排(记为A)开始,往两边扩散形成水波效果。具体的时间就是,A在1s内下去1cm,然后在1s内又复原。在A开始下去的0.3s后,A两边的也开始在1s下去。如此控制,直到最外边的也控制完。
- 3、当TDS模块采集的值超过250时,圆盘由最中心的点,往外扩散,形成水滴散开的效果。
- 4、最好是可以支持绘制“~”型图案。


2.2.2 实物图片
1、1Arduino uno 或 mega
2、1TDS模块
3、37电机
4、1无线模块
5、1接收模块
6、1触摸板












2.2.3 视频
演示视频暂时无法上传(需要的可以另外帖子留言)
2.2.4 源代码
#include <Wire.h> #include <Adafruit_PWMServoDriver.h> #include <SoftwareSerial.h> /*舵机驱动板IIC地址*/ Adafruit_PWMServoDriver pwm1 = Adafruit_PWMServoDriver(); //默认地址0x40 //Adafruit_PWMServoDriver pwm2 = Adafruit_PWMServoDriver(0x41); /* * PCA9685可以设置更新频率,时基脉冲周期20ms相当于50HZ更新频率, * PCA9685采用12位的寄存器来控制PWM占比,对于0.5ms,相当于0.5/20*4096=102的寄存器值 * 但是实际使用的时候,还是有偏差,除了0度以及180度,其他需要乘以0.915系数 * 0.5ms———— 0度:0.5/20*4096 = 102 * 1.0ms———— 45度:1/20*4096 = 204*0.915 = 187 * 1.5ms———— 90度:1.5/20*4096 = 306*0.915 = 280 * 2.0ms———— 135度:2/20*4096 = 408*0.915 = 373 * 2.5ms———— 180度:2.5/20*4096 = 512 * 30度=0.5ms+(30/180)*(2.5ms-0.5ms)=0.8333ms * 0.8333ms/20ms=off/4096,off=171,171*0.915=156 * 60度=0.5ms+(60/180)*(2.5ms-0.5ms)=1.666ms * 1.666ms/20ms=off/4096,off=239,239*0.915=219 */ /*舵机转动角度*/ #define SERVO_0 102 #define SERVO_30 156 #define SERVO_45 187 #define SERVO_60 219 #define SERVO_90 280 #define SERVO_135 373 #define SERVO_180 512 /*舵机转动时间间隔*/ #define interval0 300 /*TDS传感器相关定义*/ #define TdsSensorPin A0 #define VREF 5.0 //ADC的模拟参考电压(伏特) #define SCOUNT 30 //采样点和 int analogBuffer[SCOUNT]; //将模拟值存储在数组中,从ADC中读取 int analogBufferTemp[SCOUNT]; int analogBufferIndex = 0,copyIndex = 0; float averageVoltage = 0,tdsValue = 0,temperature = 25; /*蓝牙数据接收相关定义*/ unsigned char c[10] = {0x00}; unsigned char Length = 0; SoftwareSerial BTSerial(3, 2); //RX(D3),TX(D2) bool flag; void setup() { // put your setup code here, to run once: Serial.begin(9600); BTSerial.begin(9600); pinMode(TdsSensorPin,INPUT); //初始化TDS传感器接口 flag=true; pwm1.begin(); //复位并初始化舵机驱动板 //pwm2.begin(); pwm1.setPWMFreq(50); //调节PWM频率,范围40-1000Hz //pwm2.setPWMFreq(50); Servo_Init(); //舵机初始化 } void loop() { //put your main code here, to run repeatedly: static unsigned long analogSampleTimepoint = millis(); if(millis() - analogSampleTimepoint > 80U) //每80毫秒,从ADC中读取模拟值 { analogSampleTimepoint=millis(); analogBuffer[analogBufferIndex]=analogRead(TdsSensorPin); //读取模拟值,每80毫秒存入缓冲区 analogBufferIndex++; if(analogBufferIndex == SCOUNT) analogBufferIndex = 0; } static unsigned long printTimepoint = millis(); if(millis() - printTimepoint > 6000U) { printTimepoint = millis(); for(copyIndex=0;copyIndex < SCOUNT;copyIndex++) { analogBufferTemp[copyIndex] = analogBuffer[copyIndex]; averageVoltage = getMedianNum(analogBufferTemp,SCOUNT) * (float)VREF / 1024.0; //通过中值滤波算法读取更稳定的模拟值,并转换为电压值 float compensationCoefficient = 1.0+0.02*(temperature - 25.0); //温度补偿公式:fFinalResult(25^C) = fFinalResult(current)/(1.0+0.02*(ft -25.0)); float compensationVolatge = averageVoltage / compensationCoefficient; //温度补偿 tdsValue = (133.42*compensationVolatge*compensationVolatge*compensationVolatge - 255.86*compensationVolatge*compensationVolatge + 857.39*compensationVolatge)*0.5; //将电压值转换为tds值进行温度补偿 // Serial.print("voltage:"); // Serial.print(averageVoltage,2); // Serial.print("V "); // Serial.print("TDS Value:"); // Serial.println(tdsValue,0); // Serial.println("ppm"); } BTSerial.print("t0.txt=\"");//蓝牙发送数据 BTSerial.print(tdsValue); Serial.println(tdsValue); BTSerial.print("ppm"); BTSerial.print("\""); BTSerial.write(0xff); BTSerial.write(0xff); BTSerial.write(0xff); } Length = 0; while(BTSerial.available()>0) { c[Length++] = BTSerial.read(); //接收蓝牙数据 } if (Length > 0) { if(c[0] ==0x3 || c[0] ==0x5) { Serial.println("03"); if(flag==true) Draw_HorLine(); } else if(c[0] == 0x1 || c[0] == 0x7) { Serial.println("01"); if(flag==true) Draw_VerLine(); } else if(c[0] == 0x2|| c[0] == 0x6) { Serial.println("02"); if(flag==true) Draw_LeftLine(); } else if(c[0] == 0x0 || c[0] == 0x8) { Serial.println("00"); if(flag==true) Draw_RightLine(); } Length = 0; } } //舵机初始化 //setPWM(channel, on, off) //channel:更新的通道 //on:信号从低电平变为高电平的滴答(在0…4095之间) //off:当信号从高电平变为低电平时的滴答(在0…4095之间) void Servo_Init(void) { Serial.println("舵机初始化开始"); for(uint16_t channel=0;channel<=12;channel++) { pwm1.setPWM(channel,0,SERVO_180); } for(uint16_t channel=0;channel<=7;channel++) { //pwm2.setPWM(channel,0,SERVO_180); } delay(50); for(uint16_t channel=0;channel<=12;channel++) { pwm1.setPWM(channel,0,SERVO_0); } for(uint16_t channel=0;channel<=7;channel++) { //pwm2.setPWM(channel,0,SERVO_0); } Serial.println("舵机初始化完成"); } //中值滤波 int getMedianNum(int bArray[],int iFilterLen) { int bTab[iFilterLen]; int i,j,bTemp; for(byte i=0;i<iFilterLen;i++) { bTab[i]=bArray[i]; } for(j=0;j<iFilterLen-1;j++) { for(i=0;i<iFilterLen-j-1;i++) { if(bTab[i] > bTab[i+1]) { bTemp=bTab[i]; bTab[i]=bTab[i+1]; bTab[i+1]=bTemp; } } } if((iFilterLen & 1) > 0) bTemp=bTab[(iFilterLen -1) / 2]; else bTemp=(bTab[iFilterLen / 2] + bTab[iFilterLen / 2 - 1]) / 2; return bTemp; } void Draw_HorLine() //画横线 { flag=false; if(tdsValue <= 250) { /* *假设3、5、5、5、3分别记为A、B、C、D、E */ for(uint16_t channel=0;channel<=4;channel++) //T=0s时,C开始转(下降) { pwm1.setPWM(channel, 0, SERVO_30); //C } Serial.println("第一排"); delay(interval0); //0.3s for(uint16_t channel=0;channel<=4;channel++) //T=0.3s时,C转了30度,此时B、D也开始转(下降) { //pwm2.setPWM(channel, 0, SERVO_30); //D pwm1.setPWM(channel, 0, SERVO_60); //C } for(uint16_t channel=5;channel<=9;channel++) { pwm1.setPWM(channel, 0, SERVO_30); //B } Serial.println("第二排"); delay(interval0); //0.3s for(uint16_t channel=10;channel<=12;channel++) //T=0.6s时,C转了60度,B、D转了30度,A、E开始转(下降) { pwm1.setPWM(channel, 0, SERVO_30); //A } for(uint16_t channel=5;channel<=7;channel++) { //pwm2.setPWM(channel, 0, SERVO_30); //E } for(uint16_t channel=5;channel<=9;channel++) { pwm1.setPWM(channel, 0, SERVO_60); //B } for(uint16_t channel=0;channel<=4;channel++) { //pwm2.setPWM(channel, 0, SERVO_60); //D pwm1.setPWM(channel, 0, SERVO_90); //C } Serial.println("第三排"); delay(interval0); //0.3s for(uint16_t channel=10;channel<=12;channel++) //T=0.9s时,C转了90度,B、D转了60度,A、E转了30度 { pwm1.setPWM(channel, 0, SERVO_60); //A } for(uint16_t channel=5;channel<=7;channel++) { //pwm2.setPWM(channel, 0, SERVO_60); //E } for(uint16_t channel=5;channel<=9;channel++) { pwm1.setPWM(channel, 0, SERVO_90); //B } for(uint16_t channel=0;channel<=4;channel++) { //pwm2.setPWM(channel, 0, SERVO_90); //D pwm1.setPWM(channel, 0, SERVO_60); //C } delay(interval0); //0.3s for(uint16_t channel=10;channel<=12;channel++) //T=1.2s时,C转回到了60度,B、D转了90度,A、E转了60度 { pwm1.setPWM(channel, 0, SERVO_90); //A } for(uint16_t channel=5;channel<=7;channel++) { //pwm2.setPWM(channel, 0, SERVO_90); //E } for(uint16_t channel=5;channel<=9;channel++) { pwm1.setPWM(channel, 0, SERVO_60); //B } for(uint16_t channel=0;channel<=4;channel++) { //pwm2.setPWM(channel, 0, SERVO_60); //D pwm1.setPWM(channel, 0, SERVO_30); //C } delay(interval0); //0.3s for(uint16_t channel=10;channel<=12;channel++) //T=1.5s时,C转回到了30度,B、D转回了60度,A、E转了90度 { pwm1.setPWM(channel, 0, SERVO_60); //A } for(uint16_t channel=5;channel<=7;channel++) { //pwm2.setPWM(channel, 0, SERVO_60); //E } for(uint16_t channel=5;channel<=9;channel++) { pwm1.setPWM(channel, 0, SERVO_30); //B } for(uint16_t channel=0;channel<=4;channel++) { //pwm2.setPWM(channel, 0, SERVO_30); //D pwm1.setPWM(channel, 0, SERVO_0); //C } delay(interval0); //0.3s for(uint16_t channel=10;channel<=12;channel++) //T=1.8s时,C转回到了0度,B、D转回了30度,A、E转回了60度 { pwm1.setPWM(channel, 0, SERVO_30); //A } for(uint16_t channel=5;channel<=7;channel++) { //pwm2.setPWM(channel, 0, SERVO_30); //E } for(uint16_t channel=5;channel<=9;channel++) { pwm1.setPWM(channel, 0, SERVO_0); //B } for(uint16_t channel=0;channel<=4;channel++) { //pwm2.setPWM(channel, 0, SERVO_0); //D pwm1.setPWM(channel, 0, SERVO_0); //C } delay(interval0); //0.3s for(uint16_t channel=10;channel<=12;channel++) //T=2.1s时,C不变,B、D转回了0度,A、E转回了30度 { pwm1.setPWM(channel, 0, SERVO_0); //A } for(uint16_t channel=5;channel<=7;channel++) { //pwm2.setPWM(channel, 0, SERVO_0); //E } for(uint16_t channel=5;channel<=9;channel++) { pwm1.setPWM(channel, 0, SERVO_0); //B } for(uint16_t channel=0;channel<=4;channel++) { //pwm2.setPWM(channel, 0, SERVO_0); //D pwm1.setPWM(channel, 0, SERVO_0); //C } Serial.println("运动完成"); } else //TDS大于250 { /* *假设1、8、12分别记为A、B、C */ //T=0s时,A开始转(下降) pwm1.setPWM(2, 0, SERVO_30);//A Serial.println("第一圈"); delay(interval0); //0.3s //T=0.3s时,A转了30度,此时B也开始转(下降) pwm1.setPWM(1, 0, SERVO_30);//B pwm1.setPWM(3, 0, SERVO_30); pwm1.setPWM(6, 0, SERVO_30); pwm1.setPWM(7, 0, SERVO_30); pwm1.setPWM(8, 0, SERVO_30); //pwm2.setPWM(1, 0, SERVO_30); //pwm2.setPWM(2, 0, SERVO_30); //pwm2.setPWM(3, 0, SERVO_30); pwm1.setPWM(2, 0, SERVO_60);//A Serial.println("第二圈"); delay(interval0); //0.3s //T=0.6s时,A转了60度,B转了30度,C开始转(下降) pwm1.setPWM(0, 0, SERVO_30);//C pwm1.setPWM(4, 0, SERVO_30); pwm1.setPWM(5, 0, SERVO_30); pwm1.setPWM(9, 0, SERVO_30); pwm1.setPWM(10, 0, SERVO_30); pwm1.setPWM(11, 0, SERVO_30); pwm1.setPWM(12, 0, SERVO_30); //pwm2.setPWM(0, 0, SERVO_30); //pwm2.setPWM(4, 0, SERVO_30); //pwm2.setPWM(5, 0, SERVO_30); //pwm2.setPWM(6, 0, SERVO_30); //pwm2.setPWM(7, 0, SERVO_30); pwm1.setPWM(1, 0, SERVO_60);//B pwm1.setPWM(3, 0, SERVO_60); pwm1.setPWM(6, 0, SERVO_60); pwm1.setPWM(7, 0, SERVO_60); pwm1.setPWM(8, 0, SERVO_60); //pwm2.setPWM(1, 0, SERVO_60); //pwm2.setPWM(2, 0, SERVO_60); //pwm2.setPWM(3, 0, SERVO_60); pwm1.setPWM(2, 0, SERVO_90);//A Serial.println("第三圈"); delay(interval0); //0.3s //T=0.9s时,A转了90度,B转了60度,C转了30度 pwm1.setPWM(0, 0, SERVO_60);//C pwm1.setPWM(4, 0, SERVO_60); pwm1.setPWM(5, 0, SERVO_60); pwm1.setPWM(9, 0, SERVO_60); pwm1.setPWM(10, 0, SERVO_60); pwm1.setPWM(11, 0, SERVO_60); pwm1.setPWM(12, 0, SERVO_60); //pwm2.setPWM(0, 0, SERVO_60); //pwm2.setPWM(4, 0, SERVO_60); //pwm2.setPWM(5, 0, SERVO_60); //pwm2.setPWM(6, 0, SERVO_60); //pwm2.setPWM(7, 0, SERVO_60); pwm1.setPWM(1, 0, SERVO_90);//B pwm1.setPWM(3, 0, SERVO_90); pwm1.setPWM(6, 0, SERVO_90); pwm1.setPWM(7, 0, SERVO_90); pwm1.setPWM(8, 0, SERVO_90); //pwm2.setPWM(1, 0, SERVO_90); //pwm2.setPWM(2, 0, SERVO_90); //pwm2.setPWM(3, 0, SERVO_90); pwm1.setPWM(2, 0, SERVO_60);//A delay(interval0); //0.3s //T=1.2s时,A转回到了60度,B转了90度,C转了60度 pwm1.setPWM(0, 0, SERVO_90);//C pwm1.setPWM(4, 0, SERVO_90); pwm1.setPWM(5, 0, SERVO_90); pwm1.setPWM(9, 0, SERVO_90); pwm1.setPWM(10, 0, SERVO_90); pwm1.setPWM(11, 0, SERVO_90); pwm1.setPWM(12, 0, SERVO_90); //pwm2.setPWM(0, 0, SERVO_90); //pwm2.setPWM(4, 0, SERVO_90); //pwm2.setPWM(5, 0, SERVO_90); //pwm2.setPWM(6, 0, SERVO_90); //pwm2.setPWM(7, 0, SERVO_90); pwm1.setPWM(1, 0, SERVO_60);//B pwm1.setPWM(3, 0, SERVO_60); pwm1.setPWM(6, 0, SERVO_60); pwm1.setPWM(7, 0, SERVO_60); pwm1.setPWM(8, 0, SERVO_60); //pwm2.setPWM(1, 0, SERVO_60); //pwm2.setPWM(2, 0, SERVO_60); //pwm2.setPWM(3, 0, SERVO_60); pwm1.setPWM(2, 0, SERVO_30);//A delay(interval0); //0.3s //T=1.5s时,A转回到了30度,B转回了60度,C转了90度 pwm1.setPWM(0, 0, SERVO_60);//C pwm1.setPWM(4, 0, SERVO_60); pwm1.setPWM(5, 0, SERVO_60); pwm1.setPWM(9, 0, SERVO_60); pwm1.setPWM(10, 0, SERVO_60); pwm1.setPWM(11, 0, SERVO_60); pwm1.setPWM(12, 0, SERVO_60); //pwm2.setPWM(0, 0, SERVO_60); //pwm2.setPWM(4, 0, SERVO_60); //pwm2.setPWM(5, 0, SERVO_60); //pwm2.setPWM(6, 0, SERVO_60); //pwm2.setPWM(7, 0, SERVO_60); pwm1.setPWM(1, 0, SERVO_30);//B pwm1.setPWM(3, 0, SERVO_30); pwm1.setPWM(6, 0, SERVO_30); pwm1.setPWM(7, 0, SERVO_30); pwm1.setPWM(8, 0, SERVO_30); //pwm2.setPWM(1, 0, SERVO_30); //pwm2.setPWM(2, 0, SERVO_30); //pwm2.setPWM(3, 0, SERVO_30); pwm1.setPWM(2, 0, SERVO_0);//A delay(interval0); //0.3s //T=1.8s时,A转回到了0度,B转回了30度,C转回了60度 pwm1.setPWM(0, 0, SERVO_30);//C pwm1.setPWM(4, 0, SERVO_30); pwm1.setPWM(5, 0, SERVO_30); pwm1.setPWM(9, 0, SERVO_30); pwm1.setPWM(10, 0, SERVO_30); pwm1.setPWM(11, 0, SERVO_30); pwm1.setPWM(12, 0, SERVO_30); //pwm2.setPWM(0, 0, SERVO_30); //pwm2.setPWM(4, 0, SERVO_30); //pwm2.setPWM(5, 0, SERVO_30); //pwm2.setPWM(6, 0, SERVO_30); //pwm2.setPWM(7, 0, SERVO_30); pwm1.setPWM(1, 0, SERVO_0);//B pwm1.setPWM(3, 0, SERVO_0); pwm1.setPWM(6, 0, SERVO_0); pwm1.setPWM(7, 0, SERVO_0); pwm1.setPWM(8, 0, SERVO_0); //pwm2.setPWM(1, 0, SERVO_0); //pwm2.setPWM(2, 0, SERVO_0); //pwm2.setPWM(3, 0, SERVO_0); pwm1.setPWM(2, 0, SERVO_0);//A delay(interval0); //0.3s //T=2.1s时,A不变,B转回了0度,C转回了30度 pwm1.setPWM(0, 0, SERVO_0);//C pwm1.setPWM(4, 0, SERVO_0); pwm1.setPWM(5, 0, SERVO_0); pwm1.setPWM(9, 0, SERVO_0); pwm1.setPWM(10, 0, SERVO_0); pwm1.setPWM(11, 0, SERVO_0); pwm1.setPWM(12, 0, SERVO_0); //pwm2.setPWM(0, 0, SERVO_0); //pwm2.setPWM(4, 0, SERVO_0); //pwm2.setPWM(5, 0, SERVO_0); //pwm2.setPWM(6, 0, SERVO_0); //pwm2.setPWM(7, 0, SERVO_0); pwm1.setPWM(1, 0, SERVO_0);//B pwm1.setPWM(3, 0, SERVO_0); pwm1.setPWM(6, 0, SERVO_0); pwm1.setPWM(7, 0, SERVO_0); pwm1.setPWM(8, 0, SERVO_0); //pwm2.setPWM(1, 0, SERVO_0); //pwm2.setPWM(2, 0, SERVO_0); //pwm2.setPWM(3, 0, SERVO_0); pwm1.setPWM(2, 0, SERVO_0);//A //delay(interval0); //0.3s //T=2.4s时,A不变,B不变,C转回了0度 Serial.println("运动完成"); } flag=true; } void Draw_VerLine() //画竖线 { flag=false; if(tdsValue <= 250) { /* *假设3、5、5、5、3分别记为A、B、C、D、E */ //T=0s时,C开始转(下降) pwm1.setPWM(2, 0, SERVO_30);//C pwm1.setPWM(7, 0, SERVO_30); pwm1.setPWM(11, 0, SERVO_30); //pwm2.setPWM(2, 0, SERVO_30); //pwm2.setPWM(6, 0, SERVO_30); Serial.println("第一排"); delay(interval0); //0.3s //T=0.3s时,C转了30度,此时B、D也开始转(下降) pwm1.setPWM(1, 0, SERVO_30);//B pwm1.setPWM(6, 0, SERVO_30); pwm1.setPWM(10, 0, SERVO_30); //pwm2.setPWM(1, 0, SERVO_30); //pwm2.setPWM(5, 0, SERVO_30); pwm1.setPWM(3, 0, SERVO_30);//D pwm1.setPWM(8, 0, SERVO_30); pwm1.setPWM(12, 0, SERVO_30); //pwm2.setPWM(3, 0, SERVO_30); //pwm2.setPWM(7, 0, SERVO_30); pwm1.setPWM(2, 0, SERVO_60);//C pwm1.setPWM(7, 0, SERVO_60); pwm1.setPWM(11, 0, SERVO_60); //pwm2.setPWM(2, 0, SERVO_60); //pwm2.setPWM(6, 0, SERVO_60); Serial.println("第二排"); delay(interval0); //0.3s //T=0.6s时,C转了60度,B、D转了30度,A、E开始转(下降) pwm1.setPWM(0, 0, SERVO_30);//A pwm1.setPWM(5, 0, SERVO_30); //pwm2.setPWM(0, 0, SERVO_30); pwm1.setPWM(4, 0, SERVO_30);//E pwm1.setPWM(9, 0, SERVO_30); //pwm2.setPWM(4, 0, SERVO_30); pwm1.setPWM(1, 0, SERVO_60);//B pwm1.setPWM(6, 0, SERVO_60); pwm1.setPWM(10, 0, SERVO_60); //pwm2.setPWM(1, 0, SERVO_60); //pwm2.setPWM(5, 0, SERVO_60); pwm1.setPWM(3, 0, SERVO_60);//D pwm1.setPWM(8, 0, SERVO_60); pwm1.setPWM(12, 0, SERVO_60); //pwm2.setPWM(3, 0, SERVO_60); //pwm2.setPWM(7, 0, SERVO_60); pwm1.setPWM(2, 0, SERVO_90);//C pwm1.setPWM(7, 0, SERVO_90); pwm1.setPWM(11, 0, SERVO_90); //pwm2.setPWM(2, 0, SERVO_90); //pwm2.setPWM(6, 0, SERVO_90); Serial.println("第三排"); delay(interval0); //0.3s //T=0.9s时,C转了90度,B、D转了60度,A、E转了30度 pwm1.setPWM(0, 0, SERVO_60);//A pwm1.setPWM(5, 0, SERVO_60); //pwm2.setPWM(0, 0, SERVO_60); pwm1.setPWM(4, 0, SERVO_60);//E pwm1.setPWM(9, 0, SERVO_60); //pwm2.setPWM(4, 0, SERVO_60); pwm1.setPWM(1, 0, SERVO_90);//B pwm1.setPWM(6, 0, SERVO_90); pwm1.setPWM(10, 0, SERVO_90); //pwm2.setPWM(1, 0, SERVO_90); //pwm2.setPWM(5, 0, SERVO_90); pwm1.setPWM(3, 0, SERVO_90);//D pwm1.setPWM(8, 0, SERVO_90); pwm1.setPWM(12, 0, SERVO_90); //pwm2.setPWM(3, 0, SERVO_90); //pwm2.setPWM(7, 0, SERVO_90); pwm1.setPWM(2, 0, SERVO_60);//C pwm1.setPWM(7, 0, SERVO_60); pwm1.setPWM(11, 0, SERVO_60); //pwm2.setPWM(2, 0, SERVO_60); //pwm2.setPWM(6, 0, SERVO_60); delay(interval0); //0.3s //T=1.2s时,C转回到了60度,B、D转了90度,A、E转了60度 pwm1.setPWM(0, 0, SERVO_90);//A pwm1.setPWM(5, 0, SERVO_90); //pwm2.setPWM(0, 0, SERVO_90); pwm1.setPWM(4, 0, SERVO_90);//E pwm1.setPWM(9, 0, SERVO_90); //pwm2.setPWM(4, 0, SERVO_90); pwm1.setPWM(1, 0, SERVO_60);//B pwm1.setPWM(6, 0, SERVO_60); pwm1.setPWM(10, 0, SERVO_60); //pwm2.setPWM(1, 0, SERVO_60); //pwm2.setPWM(5, 0, SERVO_60); pwm1.setPWM(3, 0, SERVO_60);//D pwm1.setPWM(8, 0, SERVO_60); pwm1.setPWM(12, 0, SERVO_60); //pwm2.setPWM(3, 0, SERVO_60); //pwm2.setPWM(7, 0, SERVO_60); pwm1.setPWM(2, 0, SERVO_30);//C pwm1.setPWM(7, 0, SERVO_30); pwm1.setPWM(11, 0, SERVO_30); //pwm2.setPWM(2, 0, SERVO_30); //pwm2.setPWM(6, 0, SERVO_30); delay(interval0); //0.3s //T=1.5s时,C转回到了30度,B、D转回了60度,A、E转了90度 pwm1.setPWM(0, 0, SERVO_60);//A pwm1.setPWM(5, 0, SERVO_60); //pwm2.setPWM(0, 0, SERVO_60); pwm1.setPWM(4, 0, SERVO_60);//E pwm1.setPWM(9, 0, SERVO_60); //pwm2.setPWM(4, 0, SERVO_60); pwm1.setPWM(1, 0, SERVO_30);//B pwm1.setPWM(6, 0, SERVO_30); pwm1.setPWM(10, 0, SERVO_30); //pwm2.setPWM(1, 0, SERVO_30); // pwm2.setPWM(5, 0, SERVO_30); pwm1.setPWM(3, 0, SERVO_30);//D pwm1.setPWM(8, 0, SERVO_30); pwm1.setPWM(12, 0, SERVO_30); //pwm2.setPWM(3, 0, SERVO_30); //pwm2.setPWM(7, 0, SERVO_30); pwm1.setPWM(2, 0, SERVO_0);//C pwm1.setPWM(7, 0, SERVO_0); pwm1.setPWM(11, 0, SERVO_0); //pwm2.setPWM(2, 0, SERVO_0); //pwm2.setPWM(6, 0, SERVO_0); delay(interval0); //0.3s //T=1.8s时,C转回到了0度,B、D转回了30度,A、E转回了60度 pwm1.setPWM(0, 0, SERVO_30);//A pwm1.setPWM(5, 0, SERVO_30); //pwm2.setPWM(0, 0, SERVO_30); pwm1.setPWM(4, 0, SERVO_30);//E pwm1.setPWM(9, 0, SERVO_30); //pwm2.setPWM(4, 0, SERVO_30); pwm1.setPWM(1, 0, SERVO_0);//B pwm1.setPWM(6, 0, SERVO_0); pwm1.setPWM(10, 0, SERVO_0); //pwm2.setPWM(1, 0, SERVO_0); //pwm2.setPWM(5, 0, SERVO_0); pwm1.setPWM(3, 0, SERVO_0);//D pwm1.setPWM(8, 0, SERVO_0); pwm1.setPWM(12, 0, SERVO_0); //pwm2.setPWM(3, 0, SERVO_0); //pwm2.setPWM(7, 0, SERVO_0); pwm1.setPWM(2, 0, SERVO_0);//C pwm1.setPWM(7, 0, SERVO_0); pwm1.setPWM(11, 0, SERVO_0); //pwm2.setPWM(2, 0, SERVO_0); //pwm2.setPWM(6, 0, SERVO_0); delay(interval0); //0.3s //T=2.1s时,C不变,B、D转回了0度,A、E转回了30度 pwm1.setPWM(0, 0, SERVO_0);//A pwm1.setPWM(5, 0, SERVO_0); //pwm2.setPWM(0, 0, SERVO_0); pwm1.setPWM(4, 0, SERVO_0);//E pwm1.setPWM(9, 0, SERVO_0); //pwm2.setPWM(4, 0, SERVO_0); pwm1.setPWM(1, 0, SERVO_0);//B pwm1.setPWM(6, 0, SERVO_0); pwm1.setPWM(10, 0, SERVO_0); //pwm2.setPWM(1, 0, SERVO_0); //pwm2.setPWM(5, 0, SERVO_0); pwm1.setPWM(3, 0, SERVO_0);//D pwm1.setPWM(8, 0, SERVO_0); pwm1.setPWM(12, 0, SERVO_0); //pwm2.setPWM(3, 0, SERVO_0); //pwm2.setPWM(7, 0, SERVO_0); pwm1.setPWM(2, 0, SERVO_0);//C pwm1.setPWM(7, 0, SERVO_0); pwm1.setPWM(11, 0, SERVO_0); //pwm2.setPWM(2, 0, SERVO_0); //pwm2.setPWM(6, 0, SERVO_0); Serial.println("运动完成"); } else //TDS大于250 { /* *假设1、8、12分别记为A、B、C */ //T=0s时,A开始转(下降) pwm1.setPWM(2, 0, SERVO_30);//A Serial.println("第一圈"); delay(interval0); //0.3s //T=0.3s时,A转了30度,此时B也开始转(下降) pwm1.setPWM(1, 0, SERVO_30);//B pwm1.setPWM(3, 0, SERVO_30); pwm1.setPWM(6, 0, SERVO_30); pwm1.setPWM(7, 0, SERVO_30); //pwm2.setPWM(8, 0, SERVO_30); //pwm2.setPWM(1, 0, SERVO_30); //pwm2.setPWM(2, 0, SERVO_30); //pwm2.setPWM(3, 0, SERVO_30); pwm1.setPWM(2, 0, SERVO_60);//A Serial.println("第二圈"); delay(interval0); //0.3s //T=0.6s时,A转了60度,B转了30度,C开始转(下降) pwm1.setPWM(0, 0, SERVO_30);//C pwm1.setPWM(4, 0, SERVO_30); pwm1.setPWM(5, 0, SERVO_30); pwm1.setPWM(9, 0, SERVO_30); pwm1.setPWM(10, 0, SERVO_30); pwm1.setPWM(11, 0, SERVO_30); pwm1.setPWM(12, 0, SERVO_30); //pwm2.setPWM(0, 0, SERVO_30); //pwm2.setPWM(4, 0, SERVO_30); //pwm2.setPWM(5, 0, SERVO_30); //pwm2.setPWM(6, 0, SERVO_30); //pwm2.setPWM(7, 0, SERVO_30); pwm1.setPWM(1, 0, SERVO_60);//B pwm1.setPWM(3, 0, SERVO_60); pwm1.setPWM(6, 0, SERVO_60); pwm1.setPWM(7, 0, SERVO_60); pwm1.setPWM(8, 0, SERVO_60); //pwm2.setPWM(1, 0, SERVO_60); //pwm2.setPWM(2, 0, SERVO_60); //pwm2.setPWM(3, 0, SERVO_60); pwm1.setPWM(2, 0, SERVO_90);//A Serial.println("第三圈"); delay(interval0); //0.3s //T=0.9s时,A转了90度,B转了60度,C转了30度 pwm1.setPWM(0, 0, SERVO_60);//C pwm1.setPWM(4, 0, SERVO_60); pwm1.setPWM(5, 0, SERVO_60); pwm1.setPWM(9, 0, SERVO_60); pwm1.setPWM(10, 0, SERVO_60); pwm1.setPWM(11, 0, SERVO_60); pwm1.setPWM(12, 0, SERVO_60); //pwm2.setPWM(0, 0, SERVO_60); //pwm2.setPWM(4, 0, SERVO_60); //pwm2.setPWM(5, 0, SERVO_60); //pwm2.setPWM(6, 0, SERVO_60); //pwm2.setPWM(7, 0, SERVO_60); pwm1.setPWM(1, 0, SERVO_90);//B pwm1.setPWM(3, 0, SERVO_90); pwm1.setPWM(6, 0, SERVO_90); pwm1.setPWM(7, 0, SERVO_90); pwm1.setPWM(8, 0, SERVO_90); //pwm2.setPWM(1, 0, SERVO_90); //pwm2.setPWM(2, 0, SERVO_90); //pwm2.setPWM(3, 0, SERVO_90); pwm1.setPWM(2, 0, SERVO_60);//A delay(interval0); //0.3s //T=1.2s时,A转回到了60度,B转了90度,C转了60度 pwm1.setPWM(0, 0, SERVO_90);//C pwm1.setPWM(4, 0, SERVO_90); pwm1.setPWM(5, 0, SERVO_90); pwm1.setPWM(9, 0, SERVO_90); pwm1.setPWM(10, 0, SERVO_90); pwm1.setPWM(11, 0, SERVO_90); pwm1.setPWM(12, 0, SERVO_90); //pwm2.setPWM(0, 0, SERVO_90); //pwm2.setPWM(4, 0, SERVO_90); //pwm2.setPWM(5, 0, SERVO_90); //pwm2.setPWM(6, 0, SERVO_90); //pwm2.setPWM(7, 0, SERVO_90); pwm1.setPWM(1, 0, SERVO_60);//B pwm1.setPWM(3, 0, SERVO_60); pwm1.setPWM(6, 0, SERVO_60); pwm1.setPWM(7, 0, SERVO_60); pwm1.setPWM(8, 0, SERVO_60); //pwm2.setPWM(1, 0, SERVO_60); //pwm2.setPWM(2, 0, SERVO_60); //pwm2.setPWM(3, 0, SERVO_60); pwm1.setPWM(2, 0, SERVO_30);//A delay(interval0); //0.3s //T=1.5s时,A转回到了30度,B转回了60度,C转了90度 pwm1.setPWM(0, 0, SERVO_60);//C pwm1.setPWM(4, 0, SERVO_60); pwm1.setPWM(5, 0, SERVO_60); pwm1.setPWM(9, 0, SERVO_60); pwm1.setPWM(10, 0, SERVO_60); pwm1.setPWM(11, 0, SERVO_60); pwm1.setPWM(12, 0, SERVO_60); //pwm2.setPWM(0, 0, SERVO_60); //pwm2.setPWM(4, 0, SERVO_60); //pwm2.setPWM(5, 0, SERVO_60); //pwm2.setPWM(6, 0, SERVO_60); //pwm2.setPWM(7, 0, SERVO_60); pwm1.setPWM(1, 0, SERVO_30);//B pwm1.setPWM(3, 0, SERVO_30); pwm1.setPWM(6, 0, SERVO_30); pwm1.setPWM(7, 0, SERVO_30); pwm1.setPWM(8, 0, SERVO_30); //pwm2.setPWM(1, 0, SERVO_30); //pwm2.setPWM(2, 0, SERVO_30); //pwm2.setPWM(3, 0, SERVO_30); pwm1.setPWM(2, 0, SERVO_0);//A delay(interval0); //0.3s //T=1.8s时,A转回到了0度,B转回了30度,C转回了60度 pwm1.setPWM(0, 0, SERVO_30);//C pwm1.setPWM(4, 0, SERVO_30); pwm1.setPWM(5, 0, SERVO_30); pwm1.setPWM(9, 0, SERVO_30); pwm1.setPWM(10, 0, SERVO_30); pwm1.setPWM(11, 0, SERVO_30); pwm1.setPWM(12, 0, SERVO_30); //pwm2.setPWM(0, 0, SERVO_30); //pwm2.setPWM(4, 0, SERVO_30); //pwm2.setPWM(5, 0, SERVO_30); //pwm2.setPWM(6, 0, SERVO_30); //pwm2.setPWM(7, 0, SERVO_30); pwm1.setPWM(1, 0, SERVO_0);//B pwm1.setPWM(3, 0, SERVO_0); pwm1.setPWM(6, 0, SERVO_0); pwm1.setPWM(7, 0, SERVO_0); pwm1.setPWM(8, 0, SERVO_0); //pwm2.setPWM(1, 0, SERVO_0); //pwm2.setPWM(2, 0, SERVO_0); //pwm2.setPWM(3, 0, SERVO_0); pwm1.setPWM(2, 0, SERVO_0);//A delay(interval0); //0.3s //T=2.1s时,A不变,B转回了0度,C转回了30度 pwm1.setPWM(0, 0, SERVO_0);//C pwm1.setPWM(4, 0, SERVO_0); pwm1.setPWM(5, 0, SERVO_0); pwm1.setPWM(9, 0, SERVO_0); pwm1.setPWM(10, 0, SERVO_0); pwm1.setPWM(11, 0, SERVO_0); pwm1.setPWM(12, 0, SERVO_0); //pwm2.setPWM(0, 0, SERVO_0); //pwm2.setPWM(4, 0, SERVO_0); //pwm2.setPWM(5, 0, SERVO_0); //pwm2.setPWM(6, 0, SERVO_0); //pwm2.setPWM(7, 0, SERVO_0); pwm1.setPWM(1, 0, SERVO_0);//B pwm1.setPWM(3, 0, SERVO_0); pwm1.setPWM(6, 0, SERVO_0); pwm1.setPWM(7, 0, SERVO_0); pwm1.setPWM(8, 0, SERVO_0); //pwm2.setPWM(1, 0, SERVO_0); //pwm2.setPWM(2, 0, SERVO_0); //pwm2.setPWM(3, 0, SERVO_0); pwm1.setPWM(2, 0, SERVO_0);//A Serial.println("运动完成"); } flag=true; } void Draw_LeftLine() //画左斜线 { flag=false; if(tdsValue <= 250) { /* *假设2、3、4、3、4、3、2分别记为A、B、C、D、E、F、G */ //T=0s时,D开始转(下降) pwm1.setPWM(2, 0, SERVO_30);//D pwm1.setPWM(8, 0, SERVO_30); //pwm2.setPWM(1, 0, SERVO_30); Serial.println("第一排"); delay(interval0); //0.3s //T=0.3s时,D转到了30度,此时C、E也开始转(下降) pwm1.setPWM(1, 0, SERVO_30);//C pwm1.setPWM(7, 0, SERVO_30); pwm1.setPWM(12, 0, SERVO_30); //pwm2.setPWM(0, 0, SERVO_30); pwm1.setPWM(3, 0, SERVO_30);//E pwm1.setPWM(9, 0, SERVO_30); // pwm2.setPWM(2, 0, SERVO_30); //pwm2.setPWM(5, 0, SERVO_30); pwm1.setPWM(2, 0, SERVO_60);//D pwm1.setPWM(8, 0, SERVO_60); //pwm2.setPWM(1, 0, SERVO_60); Serial.println("第二排"); delay(interval0); //0.3s //T=0.6s时,D转了60度,C、E转到了30度,B、F开始转(下降) pwm1.setPWM(0, 0, SERVO_30);//B pwm1.setPWM(6, 0, SERVO_30); pwm1.setPWM(11, 0, SERVO_30); pwm1.setPWM(4, 0, SERVO_30);//F //pwm2.setPWM(3, 0, SERVO_30); //pwm2.setPWM(6, 0, SERVO_30); pwm1.setPWM(1, 0, SERVO_60);//C pwm1.setPWM(7, 0, SERVO_60); pwm1.setPWM(12, 0, SERVO_60); //pwm2.setPWM(0, 0, SERVO_60); pwm1.setPWM(3, 0, SERVO_60);//E pwm1.setPWM(9, 0, SERVO_60); //pwm2.setPWM(2, 0, SERVO_60); //pwm2.setPWM(5, 0, SERVO_60); pwm1.setPWM(2, 0, SERVO_90);//D pwm1.setPWM(8, 0, SERVO_90); //pwm2.setPWM(1, 0, SERVO_90); Serial.println("第三排"); delay(interval0); //0.3s //T=0.9s时,D转了90度,C、E转到了60度,B、F转到了30度,A、G开始转(下降) pwm1.setPWM(5, 0, SERVO_30);//A pwm1.setPWM(10, 0, SERVO_30); //pwm2.setPWM(4, 0, SERVO_30);//G //pwm2.setPWM(7, 0, SERVO_30); pwm1.setPWM(0, 0, SERVO_60);//B pwm1.setPWM(6, 0, SERVO_60); pwm1.setPWM(11, 0, SERVO_60); pwm1.setPWM(4, 0, SERVO_60);//F //pwm2.setPWM(3, 0, SERVO_60); //pwm2.setPWM(6, 0, SERVO_60); pwm1.setPWM(1, 0, SERVO_90);//C pwm1.setPWM(7, 0, SERVO_90); pwm1.setPWM(12, 0, SERVO_90); //pwm2.setPWM(0, 0, SERVO_90); pwm1.setPWM(3, 0, SERVO_90);//E pwm1.setPWM(9, 0, SERVO_90); //pwm2.setPWM(2, 0, SERVO_90); //pwm2.setPWM(5, 0, SERVO_90); pwm1.setPWM(2, 0, SERVO_60);//D pwm1.setPWM(8, 0, SERVO_60); //pwm2.setPWM(1, 0, SERVO_60); Serial.println("第四排"); delay(interval0); //0.3s //T=1.2s时,D转回到了60度,C、E转到了90度,B、F转到了60度,A、G转到了30度 pwm1.setPWM(5, 0, SERVO_60);//A pwm1.setPWM(10, 0, SERVO_60); // pwm2.setPWM(4, 0, SERVO_60);//G // pwm2.setPWM(7, 0, SERVO_60); pwm1.setPWM(0, 0, SERVO_90);//B pwm1.setPWM(6, 0, SERVO_90); pwm1.setPWM(11, 0, SERVO_90); pwm1.setPWM(4, 0, SERVO_90);//F // pwm2.setPWM(3, 0, SERVO_90); // pwm2.setPWM(6, 0, SERVO_90); pwm1.setPWM(1, 0, SERVO_60);//C pwm1.setPWM(7, 0, SERVO_60); pwm1.setPWM(12, 0, SERVO_60); // pwm2.setPWM(0, 0, SERVO_60); pwm1.setPWM(3, 0, SERVO_60);//E pwm1.setPWM(9, 0, SERVO_60); // pwm2.setPWM(2, 0, SERVO_60); // pwm2.setPWM(5, 0, SERVO_60); pwm1.setPWM(2, 0, SERVO_30);//D pwm1.setPWM(8, 0, SERVO_30); // pwm2.setPWM(1, 0, SERVO_30); delay(interval0); //0.3s //T=1.5s时,D转回到了30度,C、E转回了60度,B、F转了90度,A、G转到了60度 pwm1.setPWM(5, 0, SERVO_90);//A pwm1.setPWM(10, 0, SERVO_90); // pwm2.setPWM(4, 0, SERVO_90);//G // pwm2.setPWM(7, 0, SERVO_90); pwm1.setPWM(0, 0, SERVO_60);//B pwm1.setPWM(6, 0, SERVO_60); pwm1.setPWM(11, 0, SERVO_60); pwm1.setPWM(4, 0, SERVO_60);//F // pwm2.setPWM(3, 0, SERVO_60); // pwm2.setPWM(6, 0, SERVO_60); pwm1.setPWM(1, 0, SERVO_30);//C pwm1.setPWM(7, 0, SERVO_30); pwm1.setPWM(12, 0, SERVO_30); // pwm2.setPWM(0, 0, SERVO_30); pwm1.setPWM(3, 0, SERVO_30);//E pwm1.setPWM(9, 0, SERVO_30); // pwm2.setPWM(2, 0, SERVO_30); // pwm2.setPWM(5, 0, SERVO_30); pwm1.setPWM(2, 0, SERVO_0);//D pwm1.setPWM(8, 0, SERVO_0); // pwm2.setPWM(1, 0, SERVO_0); delay(interval0); //0.3s //T=1.8s时,D转回到了0度,C、E转回了30度,B、F转回了60度,A、G转到了90度 pwm1.setPWM(5, 0, SERVO_60);//A pwm1.setPWM(10, 0, SERVO_60); // pwm2.setPWM(4, 0, SERVO_60);//G // pwm2.setPWM(7, 0, SERVO_60); pwm1.setPWM(0, 0, SERVO_30);//B pwm1.setPWM(6, 0, SERVO_30); pwm1.setPWM(11, 0, SERVO_30); pwm1.setPWM(4, 0, SERVO_30);//F // pwm2.setPWM(3, 0, SERVO_30); // pwm2.setPWM(6, 0, SERVO_30); pwm1.setPWM(1, 0, SERVO_0);//C pwm1.setPWM(7, 0, SERVO_0); pwm1.setPWM(12, 0, SERVO_0); // pwm2.setPWM(0, 0, SERVO_0); pwm1.setPWM(3, 0, SERVO_0);//E pwm1.setPWM(9, 0, SERVO_0); // pwm2.setPWM(2, 0, SERVO_0); // pwm2.setPWM(5, 0, SERVO_0); pwm1.setPWM(2, 0, SERVO_0);//D pwm1.setPWM(8, 0, SERVO_0); // pwm2.setPWM(1, 0, SERVO_0); delay(interval0); //0.3s //T=2.1s时,D不变,C、E转回了0度,B、F转回了30度,A、G转到了60度 pwm1.setPWM(5, 0, SERVO_30);//A pwm1.setPWM(10, 0, SERVO_30); // pwm2.setPWM(4, 0, SERVO_30);//G // pwm2.setPWM(7, 0, SERVO_30); pwm1.setPWM(0, 0, SERVO_0);//B pwm1.setPWM(6, 0, SERVO_0); pwm1.setPWM(11, 0, SERVO_0); pwm1.setPWM(4, 0, SERVO_0);//F // pwm2.setPWM(3, 0, SERVO_0); // pwm2.setPWM(6, 0, SERVO_0); pwm1.setPWM(1, 0, SERVO_0);//C pwm1.setPWM(7, 0, SERVO_0); pwm1.setPWM(12, 0, SERVO_0); // pwm2.setPWM(0, 0, SERVO_0); pwm1.setPWM(3, 0, SERVO_0);//E pwm1.setPWM(9, 0, SERVO_0); // pwm2.setPWM(2, 0, SERVO_0); // pwm2.setPWM(5, 0, SERVO_0); pwm1.setPWM(2, 0, SERVO_0);//D pwm1.setPWM(8, 0, SERVO_0); // pwm2.setPWM(1, 0, SERVO_0); delay(interval0); //0.3s //T=2.4s时,D不变,C、E不变,B、F转回了0度,A、G转到了30度 pwm1.setPWM(5, 0, SERVO_0);//A pwm1.setPWM(10, 0, SERVO_0); // pwm2.setPWM(4, 0, SERVO_0);//G // pwm2.setPWM(7, 0, SERVO_0); pwm1.setPWM(0, 0, SERVO_0);//B pwm1.setPWM(6, 0, SERVO_0); pwm1.setPWM(11, 0, SERVO_0); pwm1.setPWM(4, 0, SERVO_0);//F // pwm2.setPWM(3, 0, SERVO_0); // pwm2.setPWM(6, 0, SERVO_0); pwm1.setPWM(1, 0, SERVO_0);//C pwm1.setPWM(7, 0, SERVO_0); pwm1.setPWM(12, 0, SERVO_0); // pwm2.setPWM(0, 0, SERVO_0); pwm1.setPWM(3, 0, SERVO_0);//E pwm1.setPWM(9, 0, SERVO_0); // pwm2.setPWM(2, 0, SERVO_0); // pwm2.setPWM(5, 0, SERVO_0); pwm1.setPWM(2, 0, SERVO_0);//D pwm1.setPWM(8, 0, SERVO_0); // pwm2.setPWM(1, 0, SERVO_0); Serial.println("运动完成"); } else //TDS大于250 { /* *假设1、8、12分别记为A、B、C */ //T=0s时,A开始转(下降) pwm1.setPWM(2, 0, SERVO_30);//A Serial.println("第一圈"); delay(interval0); //0.3s //T=0.3s时,A转了30度,此时B也开始转(下降) pwm1.setPWM(1, 0, SERVO_30);//B pwm1.setPWM(3, 0, SERVO_30); pwm1.setPWM(6, 0, SERVO_30); pwm1.setPWM(7, 0, SERVO_30); // pwm2.setPWM(8, 0, SERVO_30); // pwm2.setPWM(1, 0, SERVO_30); // pwm2.setPWM(2, 0, SERVO_30); // pwm2.setPWM(3, 0, SERVO_30); pwm1.setPWM(2, 0, SERVO_60);//A Serial.println("第二圈"); delay(interval0); //0.3s //T=0.6s时,A转了60度,B转了30度,C开始转(下降) pwm1.setPWM(0, 0, SERVO_30);//C pwm1.setPWM(4, 0, SERVO_30); pwm1.setPWM(5, 0, SERVO_30); pwm1.setPWM(9, 0, SERVO_30); pwm1.setPWM(10, 0, SERVO_30); pwm1.setPWM(11, 0, SERVO_30); pwm1.setPWM(12, 0, SERVO_30); // pwm2.setPWM(0, 0, SERVO_30); // pwm2.setPWM(4, 0, SERVO_30); // pwm2.setPWM(5, 0, SERVO_30); // pwm2.setPWM(6, 0, SERVO_30); // pwm2.setPWM(7, 0, SERVO_30); pwm1.setPWM(1, 0, SERVO_60);//B pwm1.setPWM(3, 0, SERVO_60); pwm1.setPWM(6, 0, SERVO_60); pwm1.setPWM(7, 0, SERVO_60); pwm1.setPWM(8, 0, SERVO_60); // pwm2.setPWM(1, 0, SERVO_60); // pwm2.setPWM(2, 0, SERVO_60); // pwm2.setPWM(3, 0, SERVO_60); pwm1.setPWM(2, 0, SERVO_90);//A Serial.println("第三圈"); delay(interval0); //0.3s //T=0.9s时,A转了90度,B转了60度,C转了30度 pwm1.setPWM(0, 0, SERVO_60);//C pwm1.setPWM(4, 0, SERVO_60); pwm1.setPWM(5, 0, SERVO_60); pwm1.setPWM(9, 0, SERVO_60); pwm1.setPWM(10, 0, SERVO_60); pwm1.setPWM(11, 0, SERVO_60); pwm1.setPWM(12, 0, SERVO_60); // pwm2.setPWM(0, 0, SERVO_60); // pwm2.setPWM(4, 0, SERVO_60); // pwm2.setPWM(5, 0, SERVO_60); // pwm2.setPWM(6, 0, SERVO_60); // pwm2.setPWM(7, 0, SERVO_60); pwm1.setPWM(1, 0, SERVO_90);//B pwm1.setPWM(3, 0, SERVO_90); pwm1.setPWM(6, 0, SERVO_90); pwm1.setPWM(7, 0, SERVO_90); pwm1.setPWM(8, 0, SERVO_90); // pwm2.setPWM(1, 0, SERVO_90); // pwm2.setPWM(2, 0, SERVO_90); // pwm2.setPWM(3, 0, SERVO_90); pwm1.setPWM(2, 0, SERVO_60);//A delay(interval0); //0.3s //T=1.2s时,A转回到了60度,B转了90度,C转了60度 pwm1.setPWM(0, 0, SERVO_90);//C pwm1.setPWM(4, 0, SERVO_90); pwm1.setPWM(5, 0, SERVO_90); pwm1.setPWM(9, 0, SERVO_90); pwm1.setPWM(10, 0, SERVO_90); pwm1.setPWM(11, 0, SERVO_90); pwm1.setPWM(12, 0, SERVO_90); // pwm2.setPWM(0, 0, SERVO_90); // pwm2.setPWM(4, 0, SERVO_90); // pwm2.setPWM(5, 0, SERVO_90); // pwm2.setPWM(6, 0, SERVO_90); // pwm2.setPWM(7, 0, SERVO_90); pwm1.setPWM(1, 0, SERVO_60);//B pwm1.setPWM(3, 0, SERVO_60); pwm1.setPWM(6, 0, SERVO_60); pwm1.setPWM(7, 0, SERVO_60); pwm1.setPWM(8, 0, SERVO_60); // pwm2.setPWM(1, 0, SERVO_60); // pwm2.setPWM(2, 0, SERVO_60); // pwm2.setPWM(3, 0, SERVO_60); pwm1.setPWM(2, 0, SERVO_30);//A delay(interval0); //0.3s //T=1.5s时,A转回到了30度,B转回了60度,C转了90度 pwm1.setPWM(0, 0, SERVO_60);//C pwm1.setPWM(4, 0, SERVO_60); pwm1.setPWM(5, 0, SERVO_60); pwm1.setPWM(9, 0, SERVO_60); pwm1.setPWM(10, 0, SERVO_60); pwm1.setPWM(11, 0, SERVO_60); pwm1.setPWM(12, 0, SERVO_60); // pwm2.setPWM(0, 0, SERVO_60); // pwm2.setPWM(4, 0, SERVO_60); // pwm2.setPWM(5, 0, SERVO_60); // pwm2.setPWM(6, 0, SERVO_60); // pwm2.setPWM(7, 0, SERVO_60); pwm1.setPWM(1, 0, SERVO_30);//B pwm1.setPWM(3, 0, SERVO_30); pwm1.setPWM(6, 0, SERVO_30); pwm1.setPWM(7, 0, SERVO_30); pwm1.setPWM(8, 0, SERVO_30); // pwm2.setPWM(1, 0, SERVO_30); // pwm2.setPWM(2, 0, SERVO_30); // pwm2.setPWM(3, 0, SERVO_30); pwm1.setPWM(2, 0, SERVO_0);//A delay(interval0); //0.3s //T=1.8s时,A转回到了0度,B转回了30度,C转回了60度 pwm1.setPWM(0, 0, SERVO_30);//C pwm1.setPWM(4, 0, SERVO_30); pwm1.setPWM(5, 0, SERVO_30); pwm1.setPWM(9, 0, SERVO_30); pwm1.setPWM(10, 0, SERVO_30); pwm1.setPWM(11, 0, SERVO_30); pwm1.setPWM(12, 0, SERVO_30); // pwm2.setPWM(0, 0, SERVO_30); // pwm2.setPWM(4, 0, SERVO_30); // pwm2.setPWM(5, 0, SERVO_30); // pwm2.setPWM(6, 0, SERVO_30); // pwm2.setPWM(7, 0, SERVO_30); pwm1.setPWM(1, 0, SERVO_0);//B pwm1.setPWM(3, 0, SERVO_0); pwm1.setPWM(6, 0, SERVO_0); pwm1.setPWM(7, 0, SERVO_0); pwm1.setPWM(8, 0, SERVO_0); // pwm2.setPWM(1, 0, SERVO_0); // pwm2.setPWM(2, 0, SERVO_0); // pwm2.setPWM(3, 0, SERVO_0); pwm1.setPWM(2, 0, SERVO_0);//A delay(interval0); //0.3s //T=2.1s时,A不变,B转回了0度,C转回了30度 pwm1.setPWM(0, 0, SERVO_0);//C pwm1.setPWM(4, 0, SERVO_0); pwm1.setPWM(5, 0, SERVO_0); pwm1.setPWM(9, 0, SERVO_0); pwm1.setPWM(10, 0, SERVO_0); pwm1.setPWM(11, 0, SERVO_0); pwm1.setPWM(12, 0, SERVO_0); // pwm2.setPWM(0, 0, SERVO_0); // pwm2.setPWM(4, 0, SERVO_0); // pwm2.setPWM(5, 0, SERVO_0); // pwm2.setPWM(6, 0, SERVO_0); // pwm2.setPWM(7, 0, SERVO_0); pwm1.setPWM(1, 0, SERVO_0);//B pwm1.setPWM(3, 0, SERVO_0); pwm1.setPWM(6, 0, SERVO_0); pwm1.setPWM(7, 0, SERVO_0); pwm1.setPWM(8, 0, SERVO_0); // pwm2.setPWM(1, 0, SERVO_0); // pwm2.setPWM(2, 0, SERVO_0); // pwm2.setPWM(3, 0, SERVO_0); pwm1.setPWM(2, 0, SERVO_0);//A Serial.println("运动完成"); } flag=true; } void Draw_RightLine() //画右斜线 { flag=false; if(tdsValue <= 250) { /* *假设2、3、4、3、4、3、2分别记为A、B、C、D、E、F、G */ //T=0s时,D开始转(下降) pwm1.setPWM(2, 0, SERVO_30);//D pwm1.setPWM(6, 0, SERVO_30); // pwm2.setPWM(3, 0, SERVO_30); Serial.println("第一排"); delay(interval0); //0.3s //T=0.3s时,D转到了30度,此时C、E也开始转(下降) pwm1.setPWM(1, 0, SERVO_30);//C pwm1.setPWM(5, 0, SERVO_30); pwm1.setPWM(3, 0, SERVO_30);//E // pwm2.setPWM(2, 0, SERVO_30); // pwm2.setPWM(7, 0, SERVO_30); pwm1.setPWM(7, 0, SERVO_30); pwm1.setPWM(10, 0, SERVO_30); // pwm2.setPWM(4, 0, SERVO_60); pwm1.setPWM(2, 0, SERVO_60);//D pwm1.setPWM(6, 0, SERVO_60); // pwm2.setPWM(3, 0, SERVO_60); Serial.println("第二排"); delay(interval0); //0.3s //T=0.6s时,D转了60度,C、E转到了30度,B、F开始转(下降) pwm1.setPWM(0, 0, SERVO_30);//B // pwm2.setPWM(1, 0, SERVO_30); // pwm2.setPWM(6, 0, SERVO_30); pwm1.setPWM(4, 0, SERVO_30);//F pwm1.setPWM(8, 0, SERVO_30); pwm1.setPWM(11, 0, SERVO_30); pwm1.setPWM(1, 0, SERVO_60);//C pwm1.setPWM(5, 0, SERVO_60); // pwm2.setPWM(2, 0, SERVO_60); // pwm2.setPWM(7, 0, SERVO_60); pwm1.setPWM(3, 0, SERVO_60);//E pwm1.setPWM(7, 0, SERVO_60); pwm1.setPWM(10, 0, SERVO_60); // pwm2.setPWM(4, 0, SERVO_90); pwm1.setPWM(2, 0, SERVO_90);//D pwm1.setPWM(6, 0, SERVO_90); // pwm2.setPWM(3, 0, SERVO_90); Serial.println("第三排"); delay(interval0); //0.3s //T=0.9s时,D转了90度,C、E转到了60度,B、F转到了30度,A、G开始转(下降) // pwm2.setPWM(0, 0, SERVO_30);//A // pwm2.setPWM(5, 0, SERVO_30); pwm1.setPWM(9, 0, SERVO_30);//G pwm1.setPWM(12, 0, SERVO_30); pwm1.setPWM(0, 0, SERVO_60);//B // pwm2.setPWM(1, 0, SERVO_60); // pwm2.setPWM(6, 0, SERVO_60); pwm1.setPWM(4, 0, SERVO_60);//F pwm1.setPWM(8, 0, SERVO_60); pwm1.setPWM(11, 0, SERVO_60); pwm1.setPWM(1, 0, SERVO_90);//C pwm1.setPWM(5, 0, SERVO_90); // pwm2.setPWM(2, 0, SERVO_90); // pwm2.setPWM(7, 0, SERVO_90); pwm1.setPWM(3, 0, SERVO_90);//E pwm1.setPWM(7, 0, SERVO_90); pwm1.setPWM(10, 0, SERVO_90); // pwm2.setPWM(4, 0, SERVO_60); pwm1.setPWM(2, 0, SERVO_60);//D pwm1.setPWM(6, 0, SERVO_60); // pwm2.setPWM(3, 0, SERVO_60); Serial.println("第四排"); delay(interval0); //0.3s //T=1.2s时,D转回到了60度,C、E转到了90度,B、F转到了60度,A、G转到了30度 // pwm2.setPWM(0, 0, SERVO_60);//A // pwm2.setPWM(5, 0, SERVO_60); pwm1.setPWM(9, 0, SERVO_60);//G pwm1.setPWM(12, 0, SERVO_60); pwm1.setPWM(0, 0, SERVO_90);//B // pwm2.setPWM(1, 0, SERVO_90); // pwm2.setPWM(6, 0, SERVO_90); pwm1.setPWM(4, 0, SERVO_90);//F pwm1.setPWM(8, 0, SERVO_90); pwm1.setPWM(11, 0, SERVO_90); pwm1.setPWM(1, 0, SERVO_60);//C pwm1.setPWM(5, 0, SERVO_60); // pwm2.setPWM(2, 0, SERVO_60); // pwm2.setPWM(7, 0, SERVO_60); pwm1.setPWM(3, 0, SERVO_60);//E pwm1.setPWM(7, 0, SERVO_60); pwm1.setPWM(10, 0, SERVO_60); // pwm2.setPWM(4, 0, SERVO_30); pwm1.setPWM(2, 0, SERVO_30);//D pwm1.setPWM(6, 0, SERVO_30); // pwm2.setPWM(3, 0, SERVO_30); delay(interval0); //0.3s //T=1.5s时,D转回到了30度,C、E转回了60度,B、F转了90度,A、G转到了60度 // pwm2.setPWM(0, 0, SERVO_90);//A // pwm2.setPWM(5, 0, SERVO_90); pwm1.setPWM(9, 0, SERVO_90);//G pwm1.setPWM(12, 0, SERVO_90); pwm1.setPWM(0, 0, SERVO_60);//B // pwm2.setPWM(1, 0, SERVO_60); // pwm2.setPWM(6, 0, SERVO_60); pwm1.setPWM(4, 0, SERVO_60);//F pwm1.setPWM(8, 0, SERVO_60); pwm1.setPWM(11, 0, SERVO_60); pwm1.setPWM(1, 0, SERVO_30);//C pwm1.setPWM(5, 0, SERVO_30); // pwm2.setPWM(2, 0, SERVO_30); // pwm2.setPWM(7, 0, SERVO_30); pwm1.setPWM(3, 0, SERVO_30);//E pwm1.setPWM(7, 0, SERVO_30); pwm1.setPWM(10, 0, SERVO_30); // pwm2.setPWM(4, 0, SERVO_0); pwm1.setPWM(2, 0, SERVO_0);//D pwm1.setPWM(6, 0, SERVO_0); // pwm2.setPWM(3, 0, SERVO_0); delay(interval0); //0.3s //T=1.8s时,D转回到了0度,C、E转回了30度,B、F转回了60度,A、G转到了90度 // pwm2.setPWM(0, 0, SERVO_60);//A // pwm2.setPWM(5, 0, SERVO_60); pwm1.setPWM(9, 0, SERVO_60);//G pwm1.setPWM(12, 0, SERVO_60); pwm1.setPWM(0, 0, SERVO_30);//B // pwm2.setPWM(1, 0, SERVO_30); // pwm2.setPWM(6, 0, SERVO_30); pwm1.setPWM(4, 0, SERVO_30);//F pwm1.setPWM(8, 0, SERVO_30); pwm1.setPWM(11, 0, SERVO_30); pwm1.setPWM(1, 0, SERVO_0);//C pwm1.setPWM(5, 0, SERVO_0); // pwm2.setPWM(2, 0, SERVO_0); // pwm2.setPWM(7, 0, SERVO_0); pwm1.setPWM(3, 0, SERVO_0);//E pwm1.setPWM(7, 0, SERVO_0); pwm1.setPWM(10, 0, SERVO_0); // pwm2.setPWM(4, 0, SERVO_0); pwm1.setPWM(2, 0, SERVO_0);//D pwm1.setPWM(6, 0, SERVO_0); // pwm2.setPWM(3, 0, SERVO_0); delay(interval0); //0.3s //T=2.1s时,D不变,C、E转回了0度,B、F转回了30度,A、G转到了60度 // pwm2.setPWM(0, 0, SERVO_30);//A // pwm2.setPWM(5, 0, SERVO_30); pwm1.setPWM(9, 0, SERVO_30);//G pwm1.setPWM(12, 0, SERVO_30); pwm1.setPWM(0, 0, SERVO_0);//B // pwm2.setPWM(1, 0, SERVO_0); // pwm2.setPWM(6, 0, SERVO_0); pwm1.setPWM(4, 0, SERVO_0);//F pwm1.setPWM(8, 0, SERVO_0); pwm1.setPWM(11, 0, SERVO_0); pwm1.setPWM(1, 0, SERVO_0);//C pwm1.setPWM(5, 0, SERVO_0); // pwm2.setPWM(2, 0, SERVO_0); // pwm2.setPWM(7, 0, SERVO_0); pwm1.setPWM(3, 0, SERVO_0);//E pwm1.setPWM(7, 0, SERVO_0); pwm1.setPWM(10, 0, SERVO_0); // pwm2.setPWM(4, 0, SERVO_0); pwm1.setPWM(2, 0, SERVO_0);//D pwm1.setPWM(6, 0, SERVO_0); // pwm2.setPWM(3, 0, SERVO_0); delay(interval0); //0.3s //T=2.4s时,D不变,C、E不变,B、F转回了0度,A、G转到了30度 // pwm2.setPWM(0, 0, SERVO_0);//A // pwm2.setPWM(5, 0, SERVO_0); pwm1.setPWM(9, 0, SERVO_0);//G pwm1.setPWM(12, 0, SERVO_0); pwm1.setPWM(0, 0, SERVO_0);//B // pwm2.setPWM(1, 0, SERVO_0); // pwm2.setPWM(6, 0, SERVO_0); pwm1.setPWM(4, 0, SERVO_0);//F pwm1.setPWM(8, 0, SERVO_0); pwm1.setPWM(11, 0, SERVO_0); pwm1.setPWM(1, 0, SERVO_0);//C pwm1.setPWM(5, 0, SERVO_0); // pwm2.setPWM(2, 0, SERVO_0); // pwm2.setPWM(7, 0, SERVO_0); pwm1.setPWM(3, 0, SERVO_0);//E pwm1.setPWM(7, 0, SERVO_0); pwm1.setPWM(10, 0, SERVO_0); // pwm2.setPWM(4, 0, SERVO_0); pwm1.setPWM(2, 0, SERVO_0);//D pwm1.setPWM(6, 0, SERVO_0); // pwm2.setPWM(3, 0, SERVO_0); Serial.println("运动完成"); } else //TDS大于250 { /* *假设1、8、12分别记为A、B、C */ //T=0s时,A开始转(下降) pwm1.setPWM(2, 0, SERVO_30);//A Serial.println("第一圈"); delay(interval0); //0.3s //T=0.3s时,A转了30度,此时B也开始转(下降) pwm1.setPWM(1, 0, SERVO_30);//B pwm1.setPWM(3, 0, SERVO_30); pwm1.setPWM(6, 0, SERVO_30); pwm1.setPWM(7, 0, SERVO_30); // pwm2.setPWM(8, 0, SERVO_30); // pwm2.setPWM(1, 0, SERVO_30); // pwm2.setPWM(2, 0, SERVO_30); // pwm2.setPWM(3, 0, SERVO_30); pwm1.setPWM(2, 0, SERVO_60);//A Serial.println("第二圈"); delay(interval0); //0.3s //T=0.6s时,A转了60度,B转了30度,C开始转(下降) pwm1.setPWM(0, 0, SERVO_30);//C pwm1.setPWM(4, 0, SERVO_30); pwm1.setPWM(5, 0, SERVO_30); pwm1.setPWM(9, 0, SERVO_30); pwm1.setPWM(10, 0, SERVO_30); pwm1.setPWM(11, 0, SERVO_30); pwm1.setPWM(12, 0, SERVO_30); // pwm2.setPWM(0, 0, SERVO_30); // pwm2.setPWM(4, 0, SERVO_30); // pwm2.setPWM(5, 0, SERVO_30); // pwm2.setPWM(6, 0, SERVO_30); // pwm2.setPWM(7, 0, SERVO_30); pwm1.setPWM(1, 0, SERVO_60);//B pwm1.setPWM(3, 0, SERVO_60); pwm1.setPWM(6, 0, SERVO_60); pwm1.setPWM(7, 0, SERVO_60); pwm1.setPWM(8, 0, SERVO_60); // pwm2.setPWM(1, 0, SERVO_60); // pwm2.setPWM(2, 0, SERVO_60); // pwm2.setPWM(3, 0, SERVO_60); pwm1.setPWM(2, 0, SERVO_90);//A Serial.println("第三圈"); delay(interval0); //0.3s //T=0.9s时,A转了90度,B转了60度,C转了30度 pwm1.setPWM(0, 0, SERVO_60);//C pwm1.setPWM(4, 0, SERVO_60); pwm1.setPWM(5, 0, SERVO_60); pwm1.setPWM(9, 0, SERVO_60); pwm1.setPWM(10, 0, SERVO_60); pwm1.setPWM(11, 0, SERVO_60); pwm1.setPWM(12, 0, SERVO_60); // pwm2.setPWM(0, 0, SERVO_60); // pwm2.setPWM(4, 0, SERVO_60); // pwm2.setPWM(5, 0, SERVO_60); // pwm2.setPWM(6, 0, SERVO_60); // pwm2.setPWM(7, 0, SERVO_60); pwm1.setPWM(1, 0, SERVO_90);//B pwm1.setPWM(3, 0, SERVO_90); pwm1.setPWM(6, 0, SERVO_90); pwm1.setPWM(7, 0, SERVO_90); pwm1.setPWM(8, 0, SERVO_90); // pwm2.setPWM(1, 0, SERVO_90); // pwm2.setPWM(2, 0, SERVO_90); // pwm2.setPWM(3, 0, SERVO_90); pwm1.setPWM(2, 0, SERVO_60);//A delay(interval0); //0.3s //T=1.2s时,A转回到了60度,B转了90度,C转了60度 pwm1.setPWM(0, 0, SERVO_90);//C pwm1.setPWM(4, 0, SERVO_90); pwm1.setPWM(5, 0, SERVO_90); pwm1.setPWM(9, 0, SERVO_90); pwm1.setPWM(10, 0, SERVO_90); pwm1.setPWM(11, 0, SERVO_90); pwm1.setPWM(12, 0, SERVO_90); // pwm2.setPWM(0, 0, SERVO_90); // pwm2.setPWM(4, 0, SERVO_90); // pwm2.setPWM(5, 0, SERVO_90); // pwm2.setPWM(6, 0, SERVO_90); // pwm2.setPWM(7, 0, SERVO_90); pwm1.setPWM(1, 0, SERVO_60);//B pwm1.setPWM(3, 0, SERVO_60); pwm1.setPWM(6, 0, SERVO_60); pwm1.setPWM(7, 0, SERVO_60); pwm1.setPWM(8, 0, SERVO_60); // pwm2.setPWM(1, 0, SERVO_60); // pwm2.setPWM(2, 0, SERVO_60); // pwm2.setPWM(3, 0, SERVO_60); pwm1.setPWM(2, 0, SERVO_30);//A delay(interval0); //0.3s //T=1.5s时,A转回到了30度,B转回了60度,C转了90度 pwm1.setPWM(0, 0, SERVO_60);//C pwm1.setPWM(4, 0, SERVO_60); pwm1.setPWM(5, 0, SERVO_60); pwm1.setPWM(9, 0, SERVO_60); pwm1.setPWM(10, 0, SERVO_60); pwm1.setPWM(11, 0, SERVO_60); pwm1.setPWM(12, 0, SERVO_60); // pwm2.setPWM(0, 0, SERVO_60); // pwm2.setPWM(4, 0, SERVO_60); // pwm2.setPWM(5, 0, SERVO_60); // pwm2.setPWM(6, 0, SERVO_60); // pwm2.setPWM(7, 0, SERVO_60); pwm1.setPWM(1, 0, SERVO_30);//B pwm1.setPWM(3, 0, SERVO_30); pwm1.setPWM(6, 0, SERVO_30); pwm1.setPWM(7, 0, SERVO_30); pwm1.setPWM(8, 0, SERVO_30); // pwm2.setPWM(1, 0, SERVO_30); // pwm2.setPWM(2, 0, SERVO_30); // pwm2.setPWM(3, 0, SERVO_30); pwm1.setPWM(2, 0, SERVO_0);//A delay(interval0); //0.3s //T=1.8s时,A转回到了0度,B转回了30度,C转回了60度 pwm1.setPWM(0, 0, SERVO_30);//C pwm1.setPWM(4, 0, SERVO_30); pwm1.setPWM(5, 0, SERVO_30); pwm1.setPWM(9, 0, SERVO_30); pwm1.setPWM(10, 0, SERVO_30); pwm1.setPWM(11, 0, SERVO_30); pwm1.setPWM(12, 0, SERVO_30); // pwm2.setPWM(0, 0, SERVO_30); // pwm2.setPWM(4, 0, SERVO_30); // pwm2.setPWM(5, 0, SERVO_30); // pwm2.setPWM(6, 0, SERVO_30); // pwm2.setPWM(7, 0, SERVO_30); pwm1.setPWM(1, 0, SERVO_0);//B pwm1.setPWM(3, 0, SERVO_0); pwm1.setPWM(6, 0, SERVO_0); pwm1.setPWM(7, 0, SERVO_0); pwm1.setPWM(8, 0, SERVO_0); // pwm2.setPWM(1, 0, SERVO_0); // pwm2.setPWM(2, 0, SERVO_0); // pwm2.setPWM(3, 0, SERVO_0); pwm1.setPWM(2, 0, SERVO_0);//A delay(interval0); //0.3s //T=2.1s时,A不变,B转回了0度,C转回了30度 pwm1.setPWM(0, 0, SERVO_0);//C pwm1.setPWM(4, 0, SERVO_0); pwm1.setPWM(5, 0, SERVO_0); pwm1.setPWM(9, 0, SERVO_0); pwm1.setPWM(10, 0, SERVO_0); pwm1.setPWM(11, 0, SERVO_0); pwm1.setPWM(12, 0, SERVO_0); // pwm2.setPWM(0, 0, SERVO_0); // pwm2.setPWM(4, 0, SERVO_0); // pwm2.setPWM(5, 0, SERVO_0); // pwm2.setPWM(6, 0, SERVO_0); // pwm2.setPWM(7, 0, SERVO_0); pwm1.setPWM(1, 0, SERVO_0);//B pwm1.setPWM(3, 0, SERVO_0); pwm1.setPWM(6, 0, SERVO_0); pwm1.setPWM(7, 0, SERVO_0); pwm1.setPWM(8, 0, SERVO_0); // pwm2.setPWM(1, 0, SERVO_0); // pwm2.setPWM(2, 0, SERVO_0); // pwm2.setPWM(3, 0, SERVO_0); pwm1.setPWM(2, 0, SERVO_0);//A Serial.println("运动完成"); } flag=true; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
- 298
- 299
- 300
- 301
- 302
- 303
- 304
- 305
- 306
- 307
- 308
- 309
- 310
- 311
- 312
- 313
- 314
- 315
- 316
- 317
- 318
- 319
- 320
- 321
- 322
- 323
- 324
- 325
- 326
- 327
- 328
- 329
- 330
- 331
- 332
- 333
- 334
- 335
- 336
- 337
- 338
- 339
- 340
- 341
- 342
- 343
- 344
- 345
- 346
- 347
- 348
- 349
- 350
- 351
- 352
- 353
- 354
- 355
- 356
- 357
- 358
- 359
- 360
- 361
- 362
- 363
- 364
- 365
- 366
- 367
- 368
- 369
- 370
- 371
- 372
- 373
- 374
- 375
- 376
- 377
- 378
- 379
- 380
- 381
- 382
- 383
- 384
- 385
- 386
- 387
- 388
- 389
- 390
- 391
- 392
- 393
- 394
- 395
- 396
- 397
- 398
- 399
- 400
- 401
- 402
- 403
- 404
- 405
- 406
- 407
- 408
- 409
- 410
- 411
- 412
- 413
- 414
- 415
- 416
- 417
- 418
- 419
- 420
- 421
- 422
- 423
- 424
- 425
- 426
- 427
- 428
- 429
- 430
- 431
- 432
- 433
- 434
- 435
- 436
- 437
- 438
- 439
- 440
- 441
- 442
- 443
- 444
- 445
- 446
- 447
- 448
- 449
- 450
- 451
- 452
- 453
- 454
- 455
- 456
- 457
- 458
- 459
- 460
- 461
- 462
- 463
- 464
- 465
- 466
- 467
- 468
- 469
- 470
- 471
- 472
- 473
- 474
- 475
- 476
- 477
- 478
- 479
- 480
- 481
- 482
- 483
- 484
- 485
- 486
- 487
- 488
- 489
- 490
- 491
- 492
- 493
- 494
- 495
- 496
- 497
- 498
- 499
- 500
- 501
- 502
- 503
- 504
- 505
- 506
- 507
- 508
- 509
- 510
- 511
- 512
- 513
- 514
- 515
- 516
- 517
- 518
- 519
- 520
- 521
- 522
- 523
- 524
- 525
- 526
- 527
- 528
- 529
- 530
- 531
- 532
- 533
- 534
- 535
- 536
- 537
- 538
- 539
- 540
- 541
- 542
- 543
- 544
- 545
- 546
- 547
- 548
- 549
- 550
- 551
- 552
- 553
- 554
- 555
- 556
- 557
- 558
- 559
- 560
- 561
- 562
- 563
- 564
- 565
- 566
- 567
- 568
- 569
- 570
- 571
- 572
- 573
- 574
- 575
- 576
- 577
- 578
- 579
- 580
- 581
- 582
- 583
- 584
- 585
- 586
- 587
- 588
- 589
- 590
- 591
- 592
- 593
- 594
- 595
- 596
- 597
- 598
- 599
- 600
- 601
- 602
- 603
- 604
- 605
- 606
- 607
- 608
- 609
- 610
- 611
- 612
- 613
- 614
- 615
- 616
- 617
- 618
- 619
- 620
- 621
- 622
- 623
- 624
- 625
- 626
- 627
- 628
- 629
- 630
- 631
- 632
- 633
- 634
- 635
- 636
- 637
- 638
- 639
- 640
- 641
- 642
- 643
- 644
- 645
- 646
- 647
- 648
- 649
- 650
- 651
- 652
- 653
- 654
- 655
- 656
- 657
- 658
- 659
- 660
- 661
- 662
- 663
- 664
- 665
- 666
- 667
- 668
- 669
- 670
- 671
- 672
- 673
- 674
- 675
- 676
- 677
- 678
- 679
- 680
- 681
- 682
- 683
- 684
- 685
- 686
- 687
- 688
- 689
- 690
- 691
- 692
- 693
- 694
- 695
- 696
- 697
- 698
- 699
- 700
- 701
- 702
- 703
- 704
- 705
- 706
- 707
- 708
- 709
- 710
- 711
- 712
- 713
- 714
- 715
- 716
- 717
- 718
- 719
- 720
- 721
- 722
- 723
- 724
- 725
- 726
- 727
- 728
- 729
- 730
- 731
- 732
- 733
- 734
- 735
- 736
- 737
- 738
- 739
- 740
- 741
- 742
- 743
- 744
- 745
- 746
- 747
- 748
- 749
- 750
- 751
- 752
- 753
- 754
- 755
- 756
- 757
- 758
- 759
- 760
- 761
- 762
- 763
- 764
- 765
- 766
- 767
- 768
- 769
- 770
- 771
- 772
- 773
- 774
- 775
- 776
- 777
- 778
- 779
- 780
- 781
- 782
- 783
- 784
- 785
- 786
- 787
- 788
- 789
- 790
- 791
- 792
- 793
- 794
- 795
- 796
- 797
- 798
- 799
- 800
- 801
- 802
- 803
- 804
- 805
- 806
- 807
- 808
- 809
- 810
- 811
- 812
- 813
- 814
- 815
- 816
- 817
- 818
- 819
- 820
- 821
- 822
- 823
- 824
- 825
- 826
- 827
- 828
- 829
- 830
- 831
- 832
- 833
- 834
- 835
- 836
- 837
- 838
- 839
- 840
- 841
- 842
- 843
- 844
- 845
- 846
- 847
- 848
- 849
- 850
- 851
- 852
- 853
- 854
- 855
- 856
- 857
- 858
- 859
- 860
- 861
- 862
- 863
- 864
- 865
- 866
- 867
- 868
- 869
- 870
- 871
- 872
- 873
- 874
- 875
- 876
- 877
- 878
- 879
- 880
- 881
- 882
- 883
- 884
- 885
- 886
- 887
- 888
- 889
- 890
- 891
- 892
- 893
- 894
- 895
- 896
- 897
- 898
- 899
- 900
- 901
- 902
- 903
- 904
- 905
- 906
- 907
- 908
- 909
- 910
- 911
- 912
- 913
- 914
- 915
- 916
- 917
- 918
- 919
- 920
- 921
- 922
- 923
- 924
- 925
- 926
- 927
- 928
- 929
- 930
- 931
- 932
- 933
- 934
- 935
- 936
- 937
- 938
- 939
- 940
- 941
- 942
- 943
- 944
- 945
- 946
- 947
- 948
- 949
- 950
- 951
- 952
- 953
- 954
- 955
- 956
- 957
- 958
- 959
- 960
- 961
- 962
- 963
- 964
- 965
- 966
- 967
- 968
- 969
- 970
- 971
- 972
- 973
- 974
- 975
- 976
- 977
- 978
- 979
- 980
- 981
- 982
- 983
- 984
- 985
- 986
- 987
- 988
- 989
- 990
- 991
- 992
- 993
- 994
- 995
- 996
- 997
- 998
- 999
- 1000
- 1001
- 1002
- 1003
- 1004
- 1005
- 1006
- 1007
- 1008
- 1009
- 1010
- 1011
- 1012
- 1013
- 1014
- 1015
- 1016
- 1017
- 1018
- 1019
- 1020
- 1021
- 1022
- 1023
- 1024
- 1025
- 1026
- 1027
- 1028
- 1029
- 1030
- 1031
- 1032
- 1033
- 1034
- 1035
- 1036
- 1037
- 1038
- 1039
- 1040
- 1041
- 1042
- 1043
- 1044
- 1045
- 1046
- 1047
- 1048
- 1049
- 1050
- 1051
- 1052
- 1053
- 1054
- 1055
- 1056
- 1057
- 1058
- 1059
- 1060
- 1061
- 1062
- 1063
- 1064
- 1065
- 1066
- 1067
- 1068
- 1069
- 1070
- 1071
- 1072
- 1073
- 1074
- 1075
- 1076
- 1077
- 1078
- 1079
- 1080
- 1081
- 1082
- 1083
- 1084
- 1085
- 1086
- 1087
- 1088
- 1089
- 1090
- 1091
- 1092
- 1093
- 1094
- 1095
- 1096
- 1097
- 1098
- 1099
- 1100
- 1101
- 1102
- 1103
- 1104
- 1105
- 1106
- 1107
- 1108
- 1109
- 1110
- 1111
- 1112
- 1113
- 1114
- 1115
- 1116
- 1117
- 1118
- 1119
- 1120
- 1121
- 1122
- 1123
- 1124
- 1125
- 1126
- 1127
- 1128
- 1129
- 1130
- 1131
- 1132
- 1133
- 1134
- 1135
- 1136
- 1137
- 1138
- 1139
- 1140
- 1141
- 1142
- 1143
- 1144
- 1145
- 1146
- 1147
- 1148
- 1149
- 1150
- 1151
- 1152
- 1153
- 1154
- 1155
- 1156
- 1157
- 1158
- 1159
- 1160
- 1161
- 1162
- 1163
- 1164
- 1165
- 1166
- 1167
- 1168
- 1169
- 1170
- 1171
- 1172
- 1173
- 1174
- 1175
- 1176
- 1177
- 1178
- 1179
- 1180
- 1181
- 1182
- 1183
- 1184
- 1185
- 1186
- 1187
- 1188
- 1189
- 1190
- 1191
- 1192
- 1193
- 1194
- 1195
- 1196
- 1197
- 1198
- 1199
- 1200
- 1201
- 1202
- 1203
- 1204
- 1205
- 1206
- 1207
- 1208
- 1209
- 1210
- 1211
- 1212
- 1213
- 1214
- 1215
- 1216
- 1217
- 1218
- 1219
- 1220
- 1221
- 1222
- 1223
- 1224
- 1225
- 1226
- 1227
- 1228
- 1229
- 1230
- 1231
- 1232
- 1233
- 1234
- 1235
- 1236
- 1237
- 1238
- 1239
- 1240
- 1241
- 1242
- 1243
- 1244
- 1245
- 1246
- 1247
- 1248
- 1249
- 1250
- 1251
- 1252
- 1253
- 1254
- 1255
- 1256
- 1257
- 1258
- 1259
- 1260
- 1261
- 1262
- 1263
- 1264
- 1265
- 1266
- 1267
- 1268
- 1269
- 1270
- 1271
- 1272
- 1273
- 1274
- 1275
- 1276
- 1277
- 1278
- 1279
- 1280
- 1281
- 1282
- 1283
- 1284
- 1285
- 1286
- 1287
- 1288
- 1289
- 1290
- 1291
- 1292
- 1293
- 1294
- 1295
- 1296
- 1297
- 1298
- 1299
- 1300
- 1301
- 1302
- 1303
- 1304
- 1305
- 1306
- 1307
- 1308
- 1309
- 1310
- 1311
- 1312
- 1313
- 1314
- 1315
- 1316
- 1317
- 1318
- 1319
- 1320
- 1321
- 1322
- 1323
- 1324
- 1325
- 1326
- 1327
- 1328
- 1329
- 1330
- 1331
- 1332
- 1333
- 1334
- 1335
- 1336
- 1337
- 1338
- 1339
- 1340
- 1341
- 1342
- 1343
- 1344
- 1345
- 1346
- 1347
- 1348
- 1349
- 1350
- 1351
- 1352
- 1353
- 1354
- 1355
- 1356
- 1357
- 1358
- 1359
- 1360
- 1361
- 1362
- 1363
- 1364
- 1365
- 1366
- 1367
- 1368
- 1369
- 1370
- 1371
- 1372
- 1373
- 1374
- 1375
- 1376
- 1377
- 1378
- 1379
- 1380
- 1381
- 1382
- 1383
- 1384
- 1385
- 1386
- 1387
- 1388
- 1389
- 1390
- 1391
- 1392
- 1393
- 1394
- 1395
- 1396
- 1397
- 1398
- 1399
- 1400
- 1401
- 1402
- 1403
- 1404
- 1405
- 1406
- 1407
- 1408
- 1409
- 1410
- 1411
- 1412
- 1413
- 1414
- 1415
- 1416
- 1417
- 1418
- 1419
- 1420
- 1421
- 1422
- 1423
- 1424
- 1425
- 1426
- 1427
- 1428
- 1429
- 1430
- 1431
- 1432
- 1433
- 1434
- 1435
- 1436
- 1437
- 1438
- 1439
- 1440
- 1441
- 1442
- 1443
- 1444
- 1445
- 1446
- 1447
- 1448
- 1449
- 1450
- 1451
- 1452
- 1453
- 1454
- 1455
- 1456
- 1457
- 1458
- 1459
- 1460
- 1461
- 1462
- 1463
- 1464
- 1465
- 1466
- 1467
- 1468
- 1469
- 1470
- 1471
- 1472
- 1473
- 1474
- 1475
- 1476
- 1477
- 1478
- 1479
- 1480
- 1481
- 1482
- 1483
- 1484
- 1485
- 1486
- 1487
- 1488
- 1489
- 1490
- 1491
- 1492
- 1493
- 1494
- 1495
- 1496
- 1497
- 1498
- 1499
- 1500
- 1501
- 1502
- 1503
- 1504
- 1505
2.3 气体传感器 —— 气体检测
2.3.1 功能介绍


- 1、气体芯片的大小约1.5*1.5cm大小,如上图所示,
16个圆圈对应16个气体检测通道。气体浓度越大,阻值越大。室内通常情况下就是1M欧姆左右,浓度加大阻值可以去到3M欧姆。 - 2、每个通道外接一个分压电阻,分压电阻和气体芯片直接连接到ADS1256芯片,每个ADS芯片有8个通道,因此需要两片ADS。
ADS是24位精度ADC采集芯片。
3、不需要计算具体的气体浓度值,用电压值的形式表示就行。并显示在HMI显示屏。 - 4、当然也需要把数据写入SD内存卡。
- 5、并
预留蓝牙接口,把数据也通过蓝牙实时发送出去。 - 6、通过锂电池供电,并板载锂电池充电电路。
2.3.2 实物图片
1、1ATmega328p
2、4 ADS1115芯片
3、13.5寸HMI显示屏
4、1气体芯片
5、1SD卡
6、16电阻

2.3.3 视频
演示视频暂时无法上传(需要的可以另外帖子留言)
2.3.4 源代码
#include <stdio.h> #include <SoftwareSerial.h> //虚拟串口定义 ------LCD串口显示屏 SoftwareSerial mySerial(3, 2); // RX, TX unsigned char serialData[5]; // 显示屏接收4个字节数据 bool stringComplete = false; //显示屏数据是否更新 true已更新 false未更新或者已处理 防止二次处理 enum ADCmcuStu{OneTestStart, OneTestEnd, LineModelStart, LineModelEnd}NowStu; //当前状态 OneTestStart:一键测试按键 OneTestEnd:测试结束 LineModelStart:曲线模式 // ad1115 采集定义 #include <Wire.h> #include <Adafruit_ADS1015.h> /*ADS1115库定义*/ Adafruit_ADS1115 ads0(0x48); /*ADS设备地址*/ Adafruit_ADS1115 ads1(0x49); /*ADS设备地址*/ Adafruit_ADS1115 ads2(0x4A); /*ADS设备地址*/ Adafruit_ADS1115 ads3(0x4B); /*ADS设备地址*/ //读取SD卡信息库 #include <SPI.h> //SD卡用到的SPI库 #include <SD.h> //SD卡用到的库 #include <SdFat.h> //SD卡文件读写库 Sd2Card card; SdVolume volume; SdFile root; File myFile;//文件 const int chipSelect = 4; //SD卡4号位选 //蓝牙模块初始化 SoftwareSerial mySerialHc(6,5); // RX, TX const int HC_EN=7; //D7引脚用到蓝牙的使能端 目前为一直拉低默认使能 拉高不使能 const int HC_STU=8; //蓝牙连接引脚 拉高:蓝牙已连接 拉低:蓝牙未连接 bool stringCompleteHc = false; // 蓝牙数据是否更新 ture:已更新 false:未更新或者更新完成已处理 防止二次处理 void setup(void) { Serial.begin(9600); //主串口波特率未9600 用来调试 Serial.println("WelCome"); //主串口输出测试 //ad1115 初始化 ,使用4个ADS1115对象方便操作 ads0.begin(); //ADS1115模块初始化 ads1.begin(); //ADS1115模块初始化 ads2.begin(); //ADS1115模块初始化 ads3.begin(); //ADS1115模块初始化 mySerial.begin(115200); //显示屏串口波特率 NowStu=OneTestEnd; //初始化测试状态为停止测试 //蓝牙模块初始化 mySerialHc.begin(9600); //模块上电灯快闪,arduino发送指令时需要按住模块上的按键 pinMode(HC_EN, OUTPUT); //蓝牙使能 pinMode(HC_STU, INPUT); //蓝牙状态灯 digitalWrite(HC_EN, LOW); //默认使能 mySerial.listen(); //监听切换,由于使用两个软串口,需要切换监听。 } void loop(void) { SerialGeTData(); //显示屏串口接收处理 SerialScan(); //根据显示屏接受到的数据判断当前状态 while(NowStu==OneTestStart){ //如果为测试状态 SerialGeTData(); //显示屏串口接收处理 SerialScan(); //显示屏串口接收处理 getAndUpLoad(); //测试显示数据和保存数据到SD卡 } } //备用 本来使用串口中断更为合适 虚拟串口串口中不知为何失效 //void SerialEvent() { // while (mySerial.available()) { // // get the new byte: // mySerial.readBytes(serialData, 4); // // Serial.write(serialData,4); // stringComplete=true; // } //} //按键扫描程序 void SerialScan(){ if (stringComplete) { stringComplete=false; //这里标志串口显示屏接收的数据已处理,处理完毕 if(serialData[0]==0x05){ //显示屏数据定义05开头表示一键测试数据界面 if(serialData[1]==0x00){ //0x00表示一键测试界面用户按下了开始测试 serialData[1]=0x0D; //将第二位设置为0XOD,防止二次处理 NowStu=OneTestStart; //将当前状态设置为一键测试状态 } else if(serialData[1]==0xFF){ //暂停测试 serialData[1]=0x0D; //将第二位设置为0XOD,防止二次处理 NowStu=OneTestEnd; //停止采集 myFile.close(); //SD卡文件关闭 } else if(serialData[1]==0xEA){ //查询SD卡状态 serialData[1]=0x0D; //将第二位设置为0XOD,防止二次处理 //读取内存卡信息 if (!card.init(SPI_HALF_SPEED, chipSelect) || !SD.begin(4)) { //SD卡初始化,判断SD卡是否连接正常 //无SD卡 unsigned char data[26]={0x53,0x44,0x73,0x74,0x75,0x2E,0x74,0x78,0x74,0x3D,0x22,0x4E,0x6F,0x20,0x53,0x44,0x20,0x63,0x61,0x72,0x64,0x22,0xff,0xff,0xff}; //该数据为ASCLL码值 mySerial.write(data,25); //在一键测试显示屏上面显示无SD卡 Serial.println("sd card no"); //主串口调试输出 } else { if (!volume.init(card)) { //检查SD卡是否符合FAT16文件格式,不符合无法写入,在一键测试的界面上面显示 提示内容为: Only Support FAT16/FAT32 unsigned char data[40]={0x53,0x44,0x73,0x74,0x75,0x2E,0x74,0x78,0x74,0x3D,0x22,0x4F,0x6E,0x6C,0x79,0x20,0x53,0x75,0x70,0x70,0x6F,0x72,0x74,0x20,0x46,0x41,0x54,0x31,0x36,0x2F,0x46,0x41,0x54,0x33,0x32,0x22,0xff,0xff,0xff}; mySerial.write(data,39); //发送提示文字到一键测试界面 } else{ myFile = SD.open("READTEST.CSV", FILE_WRITE); //打开测试文件名称 //有SD卡 uint32_t volumesize; uint32_t dsnd,dend; int i=0,j=0; volumesize = volume.blocksPerCluster(); // clusters are collections of blocks volumesize *= volume.clusterCount(); // we'll have a lot of clusters volumesize /= 2; // SD card blocks are always 512 bytes (2 blocks are 1KB) volumesize /= 1024; // MB dsnd=volumesize; //SD卡内存 dend=volumesize; //SD卡内存 while(dsnd!=0){ i=i+1; dsnd=dsnd/10; }//计算出内存的位数 比如119MB,位数就为3位 unsigned char data[50]={0x53,0x44,0x73,0x74,0x75,0x2E,0x74,0x78,0x74,0x3D,0x22,0x53,0x44,0x20,0x43,0x61,0x72,0x64,0x20,0x4F,0x4B,0x20,0x53,0x69,0x7A,0x65,0x3D,0x31,0x31,0x31,0x30,0x4D,0x42,0x22,0xff,0xff,0xff};//SDstu.txt="SD Card OK Size=1110MB" while(dend!=0){ *(data+27+i-j)=dend%10+48; j=j+1; dend=dend/10; }//将内存的位数转换成内存 这里将1110MB每个换成相应的内存值 mySerial.write(data,50);//将一键测试内存状态SD Card OK Size=1110MB } } } } else if(serialData[0]==0xBA){ //0XBA代表蓝牙传输界面 if (serialData[1]==0xBA){ serialData[1]=0x0D; //将第二位设置为0XOD,防止二次处理 if (digitalRead(HC_STU) == HIGH) { //蓝牙已连接 unsigned char data[20]={0x74,0x32,0x2E,0x74,0x78,0x74,0x3D,0x22,0x4F,0x6E,0x4C,0x69,0x6E,0x65,0x22,0xff,0xff,0xff}; mySerial.write(data,18); //蓝牙连接显示Online } else { unsigned char data[20]={0x74,0x32,0x2E,0x74,0x78,0x74,0x3D,0x22,0x4F,0x66,0x66,0x4C,0x69,0x6E,0x65,0x22,0xff,0xff,0xff}; mySerial.write(data,19); //蓝牙连接显示Offline } } else if (serialData[2]==0xAF){ //发送数据到手机APP ,用户点击了发送数据到APP上面 } } } } //该函数备用 用来蓝牙发送命令让气体检测系统传数据到APP上面 void HcSerialGeTData(){ while(mySerialHc.available()){ char ch; ch = mySerialHc.read(); Serial.print(ch); if(ch=='1') Serial.print("1"); else if(ch=='0') Serial.print("0"); else{ Serial.println("error cmd");//错误指令不作任何操作并输出error } stringComplete=true; } // Get response } //显示屏串口轮询的方式接收4个数据 void SerialGeTData(){ while (mySerial.available()) { // get the new byte: mySerial.readBytes(serialData, 4); stringComplete=true; } } //采集并且上传数据 void getAndUpLoad(){ int16_t adc0, adc1, adc2, adc3; int16_t adc4, adc5, adc6, adc7; int16_t adc8, adc9, adc10, adc11; int16_t adc12, adc13, adc14, adc15; //采集16个通道的数据 adc0 = ads0.readADC_SingleEnded(0); delay(1); adc1 = ads0.readADC_SingleEnded(1); delay(1); adc2 = ads0.readADC_SingleEnded(2); delay(1); adc3 = ads0.readADC_SingleEnded(3); delay(1); adc4 = ads1.readADC_SingleEnded(0); delay(1); adc5 = ads1.readADC_SingleEnded(1); delay(1); adc6 = ads1.readADC_SingleEnded(2); delay(1); adc7 = ads1.readADC_SingleEnded(3); delay(1); adc8 = ads2.readADC_SingleEnded(0); delay(1); adc9 = ads2.readADC_SingleEnded(1); delay(1); adc10 = ads2.readADC_SingleEnded(2); delay(1); adc11 = ads2.readADC_SingleEnded(3); delay(1); adc12 = ads3.readADC_SingleEnded(0); delay(1); adc13 = ads3.readADC_SingleEnded(1); delay(1); adc14 = ads3.readADC_SingleEnded(2); delay(1); adc15 = ads3.readADC_SingleEnded(3); delay(1); Serial.print(adc0); Serial.print(adc1); Serial.print(adc2); Serial.print(adc3); Serial.print(adc4); Serial.print(adc5); Serial.print(adc6); Serial.print(adc7); Serial.print(adc8); Serial.print(adc9); Serial.print(adc10); Serial.print(adc11); Serial.print(adc12); Serial.print(" "); Serial.print(adc13); Serial.print(" "); Serial.print(adc14); Serial.print(" "); Serial.println(adc15); Serial.print(" "); DisplayADCData(0x6E,0x30,adc0); //这里0X6E代表左边8个通道的数据控件ID ,0X30代表左边第一个通道 ,adc0是采集的数据 DisplayADCData(0x6E,0x31,adc1); //这里0X6E代表左边8个通道的数据控件ID ,0X31代表左边第二个通道 ,adc1是采集的数据 DisplayADCData(0x6E,0x32,adc2); //这里0X6E代表左边8个通道的数据控件ID ,0X32代表左边第三个通道 ,adc2是采集的数据 DisplayADCData(0x6E,0x33,adc3); //这里0X6E代表左边8个通道的数据控件ID ,0X33代表左边第四个通道 ,adc3是采集的数据 DisplayADCData(0x6E,0x34,adc4); //这里0X6E代表左边8个通道的数据控件ID ,0X34代表左边第五个通道 ,adc5是采集的数据 DisplayADCData(0x6E,0x35,adc5); //这里0X6E代表左边8个通道的数据控件ID ,0X35代表左边第六个通道 ,adc6是采集的数据 DisplayADCData(0x6E,0x36,adc6); //这里0X6E代表左边8个通道的数据控件ID ,0X36代表左边第七个通道 ,adc7是采集的数据 DisplayADCData(0x6E,0x37,adc7); //这里0X6E代表左边8个通道的数据控件ID ,0X37代表左边第八个通道 ,adc8是采集的数据 DisplayADCData(0x6D,0x30,adc8); //这里0X6D代表右边8个通道的数据控件ID ,0X30代表右边第一个通道 ,adc9是采集的数据 DisplayADCData(0x6D,0x31,adc9); //这里0X6D代表右边8个通道的数据控件ID ,0X31代表右边第二个通道 ,adc10是采集的数据 DisplayADCData(0x6D,0x32,adc10); //这里0X6D代表右边8个通道的数据控件ID ,0X32代表右边第三个通道 ,adc11是采集的数据 DisplayADCData(0x6D,0x33,adc11); //这里0X6D代表右边8个通道的数据控件ID ,0X33代表右边第四个通道 ,adc12是采集的数据 DisplayADCData(0x6D,0x34,adc12); //这里0X6D代表右边8个通道的数据控件ID ,0X34代表右边第五个通道 ,adc13是采集的数据 DisplayADCData(0x6D,0x35,adc13); //这里0X6D代表右边8个通道的数据控件ID ,0X34代表右边第六个通道 ,adc14是采集的数据 DisplayADCData(0x6D,0x36,adc14); //这里0X6D代表右边8个通道的数据控件ID ,0X34代表右边第七个通道 ,adc15是采集的数据 DisplayADCData(0x6D,0x37,adc15); //这里0X6D代表右边8个通道的数据控件ID ,0X34代表右边第八个通道 ,adc16是采集的数据 char savedata[200]={}; String savedataString = ""; char* p; p=savedata; sprintf(p,"%d,%d,%d,%d,%d,%d,%d,%d,%d,%d,%d,%d,%d,%d,%d,%d",adc0,adc1,adc2,adc3,adc4,adc5,adc6,adc7,adc8,adc9,adc10,adc11,adc12,adc13,adc14,adc15);//将ADC 采集的数据格式化到savedata数据中 for(int i=0;i<100;i++){ savedataString+=*(p+i); }//循环将char字符数据转换成String格式 if (myFile) {//如果文件能正确打开,则做一下动作 myFile.println(savedataString); //写入SD卡数据 myFile.close(); //SD卡中文件关闭 } else { // if the file didn't open, print an error: myFile.close(); //SD卡中文件关闭 myFile = SD.open("READTEST.CSV", FILE_WRITE); //打开 myFile.println(savedataString);//写入SD卡READTEST.CSV文件数据 myFile.close();//写完关闭 } } /*------------------------------------------------------ * 函数名称: DisplayADCData * 参数 TyID: 0X6E代表左边8个通道 0x6D代表右边8个通道 * 参数 id: 比如0X30 代表显示屏中控件数组 * 参数 adcv :让文本控件显示的数据 * 返回值:无 ------------------------------------------------------*/ void DisplayADCData(unsigned char tyid,unsigned char id,int16_t adcv){ unsigned char data[15]={0x6E,0x30,0x2E,0x76,0x61,0x6C,0x3D}; //显示屏显示基本数据格式 data[0]=tyid;data[1]=id; int len=IntoStrAscill(adcv,data); mySerial.write(data,10+len); //发送数据到显示屏 } /*------------------------------------------------------ * 函数名称: IntoStrAscill * 参数 a: 表示int16_t类型的传输数据 * 参数 data: 表示int16_t类型的传输数据转换成显示屏能识别的16进制数据 * 返回值:传输数据的长度 ------------------------------------------------------*/ int IntoStrAscill(int16_t a,unsigned char *data){ int16_t dsnd,dend=0; int i=0,j=0; dend=a; dsnd=a; while(dsnd!=0){ i=i+1; dsnd=dsnd/10; } while(dend!=0){ *(data+6+i-j)=dend%10+48; j=j+1; dend=dend/10; } *(data+7+i)=0xff; *(data+8+i)=0xff; *(data+9+i)=0xff; return i; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
- 298
- 299
- 300
- 301
- 302
- 303
- 304
- 305
- 306
- 307
- 308
- 309
- 310
- 311
- 312
- 313
- 314
- 315
- 316
- 317
- 318
- 319
- 320
- 321
- 322
- 323
- 324
- 325
- 326
- 327
- 328
- 329
2.4 气体采集平台
2.4.1 功能介绍
- 1、CCS811采集CO2的ppm值。
- 2、MICS6814或4541采集CO、NO2、C2H5OH、H2、NH3、CH4、C3H8、C4H10的ppm值。
- 3、ppm显示在HMI显示屏。
- 4、当然也需要把数据写入SD内存卡。
- 5、并预留蓝牙接口,把数据也通过蓝牙实时发送出去。
- 6、通过锂电池供电,并板载锂电池充电电路。
2.4.2 实物图片
1、1ATmega328p
2、13.5寸HMI显示屏
3、1CCS811芯片
4、1MICS6814或4541芯片
5、1*SD卡


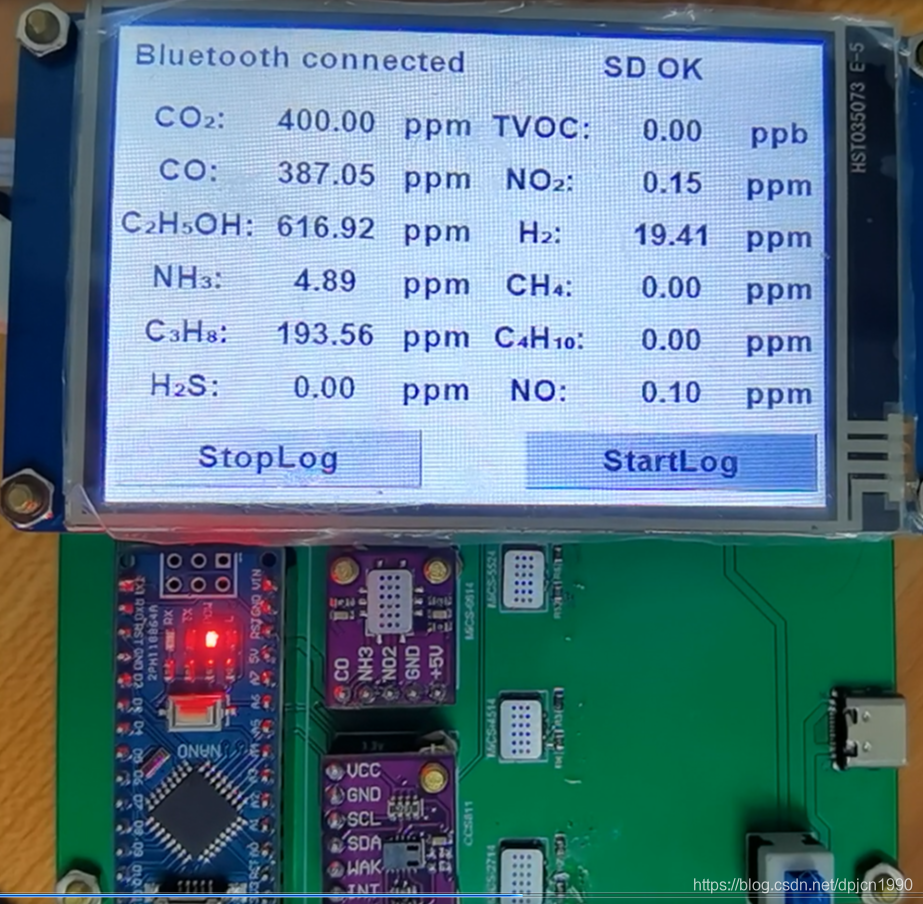
2.4.3 视频
演示视频暂时无法上传(需要的可以另外帖子留言)
2.4.4 源代码
#include <SoftwareSerial.h> //虚拟串口定义 #include "Adafruit_CCS811.h" #include <SPI.h> //SD卡用到的SPI库 #include <SD.h> //SD卡用到的库 File myFile; //文件 Adafruit_CCS811 ccs; SoftwareSerial SerialHMI(2, 3); //LCD RX, TX SoftwareSerial SerialBL(6, 5); //蓝牙 RX, TX unsigned char lcdenddata[3] = {0xff,0xff,0xff}; #define SD_CS 4 //SD卡4号位选 #define C_WAKE 10 #define PIN_CO A2 #define PIN_NO2 A0 #define PIN_NH3 A1 #define BL_STU 7 //蓝牙连接引脚 高:蓝牙已连接 低:蓝牙未连接 //--CO-- RED sensor, continuous power ON, 25°C, 50% RH float CO_a = 4.367409, CO_b = -1.184229; //R² = 0.996355 float H2S_a = 0.000750, H2S_b = -12.648453; //R² = 0.996355 //float NH3_a = 0.929592, NH3_b = -4.581835; //R² = 0.998526 float C2H5OH_a = 1.581239,C2H5OH_b = -1.588810; //R² = 0.999069 //float H2_a = 1.335670, H2_b = -1.100056; //R² = 0.923029 float CH4_a = 4.735701, CH4_b = -4.397849; //R² = 0.994133 //float C3H8_a = 192.959787,C3H8_b = -1.576081; //R² = 0.991974 float C4H10_a = 0.000001, C4H10_b = -8.574002; //R² = 0.993917 //--NO2-- OX sensor, continuous power ON, 25°C, 50% RH float NO2_a = 0.158508, NO2_b = 1.003580; //R² = 0.999567 float NO_a = 0.100458, NO_b = -6.905034; //R² = 0.996571 float H2_a = 19.414884, H2_b = -7.140802; //R² = 0.998710 //--NH3--NH3 sensor, continuous power ON, 25°C, 50% RH float NH3_a = 0.597818, NH3_b = -1.906549; //R² = 0.997497 //float H2_a = 8.065816, H2_b = -2.779010; //R² = 0.964979 //float C2H5OH_a = 0.220619,C2H5OH_a = -2.655544; //R² = 0.983520 float C3H8_a = 9.262341,C3H8_b =-2.756977; //R² = 0.998483 //float C4H10_a = 503.395368,C4H10_b = -1.920635; //R² = 0.977432 int CO_base,NO2_base,NH3_base; //base value in the clean air float CO2,TVOC,CO,H2S,C2H5OH,CH4,C4H10,NO2,NO,H2,NH3,C3H8; //ppm value void setup() { Serial.begin(9600);// initialize serial communications at 9600 bps: SerialHMI.begin(9600); //显示屏串口波特率 SerialBL.begin(9600); //显示屏串口波特率 pinMode(C_WAKE, OUTPUT); digitalWrite(C_WAKE, LOW); pinMode(BL_STU, INPUT); //蓝牙状态灯 if(!ccs.begin()){ Serial.println(F("Failed to start CO2 sensor! Please check your wiring.")); } // Wait for the sensor to be ready // while(!ccs.available()); ccs.disableInterrupt(); //清洁空气下的base值,200次取平均 CO_base = 0; NO2_base = 0; NH3_base = 0; for(int count = 1; count <= 200; count++){ CO_base += (analogRead(PIN_CO) - CO_base)/count; //求平均值 NO2_base += (analogRead(PIN_NO2) - NO2_base)/count;//求平均值 NH3_base += (analogRead(PIN_NH3) - NH3_base)/count;//求平均值 } } void loop() { Gases_read(); HMIdisplay(); Bluetooth(); Serialprint(); SD_dataLog(); delay(1000); } float Get_ppm(int _Gas_pin, int _Gas_base, float Gas_a, float Gas_b){ int _Gas_now = analogRead(_Gas_pin); if(_Gas_now < _Gas_base) _Gas_now = _Gas_base; float _Rs_R0 = ((1023.0 - _Gas_now) * _Gas_base * 1.0)/((1023.0 - _Gas_base) * _Gas_now);// Get ratio RS_gas/RS_air if(_Rs_R0 <= 0){ _Rs_R0 = 0;} //No negative values accepted or upper datasheet recomendation. float _PPM= Gas_a*pow(_Rs_R0, Gas_b); if(_PPM < 0) { _PPM = 0;} //No negative values accepted or upper datasheet recomendation. //if(_PPM > 10000) _PPM = 99999999; //No negative values accepted or upper datasheet recomendation. return _PPM; } void Gases_read(){ if(ccs.available()){ if(!ccs.readData()){ CO2 = ccs.geteCO2(); if(CO2 < 10){CO2 = random(400,410);} TVOC = ccs.getTVOC(); // tempvalue=ccs.calculateTemperature(); } else{ Serial.println(F("CCS811 ERROR!")); } } CO = Get_ppm(PIN_CO, CO_base, CO_a, CO_b); //Carbon monoxide 1 – 1000ppm NO2 = Get_ppm(PIN_NO2, NO2_base, NO2_a, NO2_b); //Nitrogen dioxide 0.05 – 10ppm C2H5OH = Get_ppm(PIN_CO, CO_base, C2H5OH_a, C2H5OH_b); //Ethanol 10 – 500ppm H2 = Get_ppm(PIN_NO2, NO2_base, H2_a, H2_b); //Hydrogen 1 – 1000ppm NH3 = Get_ppm(PIN_NH3, NH3_base, NH3_a, NH3_b); //Ammonia 1 – 500ppm CH4 = Get_ppm(PIN_CO, CO_base, CH4_a, CH4_b); //Methane >1000ppm C3H8 = Get_ppm(PIN_NH3, NH3_base, C3H8_a, C3H8_b); //Propane >1000ppm C4H10 = Get_ppm(PIN_CO, CO_base, C4H10_a, C4H10_b); //Iso-butane >1000ppm H2S = Get_ppm(PIN_CO, CO_base, H2S_a, H2S_b); NO = Get_ppm(PIN_NO2, NO2_base, NO_a, NO_b); } void HMIprint(String ID, uint16_t value){ SerialHMI.print(ID + value); SerialHMI.write(lcdenddata,3); delay(10); } void HMIdisplay(){ HMIprint("x0.val=", CO2*100); HMIprint("x1.val=", TVOC*100); HMIprint("x2.val=", CO*100); HMIprint("x3.val=", NO2*100); HMIprint("x4.val=", C2H5OH*100); HMIprint("x5.val=", H2*100); HMIprint("x6.val=", NH3*100); HMIprint("x7.val=", CH4*100); HMIprint("x8.val=", C3H8*100); HMIprint("x9.val=", C4H10*100); HMIprint("x10.val=", H2S*100); HMIprint("x11.val=", NO*100); } /********蓝牙状态函数********/ void Bluetooth(){ int Bluetooth_State = digitalRead(BL_STU); //读取I/O口状态 if(Bluetooth_State == HIGH){ Serial.println(F("Bluetooth Connected")); SerialHMI.print(F("s1.txt=\"Bluetooth connected\"")); SerialHMI.write(lcdenddata,3); delay(10); } else{ Serial.println(F("Bluetooth available")); SerialHMI.print(F("s1.txt=\"Bluetooth available\"")); SerialHMI.write(lcdenddata,3); delay(10); } } void SD_dataLog(){ if (!SD.begin(SD_CS)){ //SD卡初始化,判断SD卡是否连接正常 Serial.println(F("SD Not Ready")); SerialHMI.print(F("s2.txt=\"SD Not Ready\"")); SerialHMI.write(lcdenddata,3); } else{ Serial.println(F("SD Ready")); SerialHMI.print(F("s2.txt=\"SD Ready\"")); SerialHMI.write(lcdenddata,3); myFile = SD.open("datalog.CSV", FILE_WRITE); //打开 delay(1000); myFile.print(CO2); myFile.print(F(",")); myFile.print(TVOC); myFile.print(F(",")); myFile.print(CO); myFile.print(F(",")); myFile.print(NO2); myFile.print(F(",")); myFile.print(C2H5OH);myFile.print(F(",")); myFile.print(H2); myFile.print(F(",")); myFile.print(NH3); myFile.print(F(",")); myFile.print(CH4); myFile.print(F(",")); myFile.print(C3H8); myFile.print(F(",")); myFile.print(C4H10); myFile.print(F(",")); myFile.print(H2S); myFile.print(F(",")); myFile.println(NO); // myFile.println(); myFile.close();//写完关闭 delay(1000); } } void Serialprint(){ Serial.println(F("-----------------------------------------------------")); Serial.print(F(" CO2 :"));Serial.print(CO2);Serial.print(F("\tppm\t TVOC:"));Serial.print(TVOC);Serial.println(F("\tppm")); Serial.print(F(" CO :"));Serial.print(CO);Serial.print(F("\tppm\t NO2 :"));Serial.print(NO2);Serial.println(F("\tppm")); Serial.print(F("C2H5OH:"));Serial.print(C2H5OH);Serial.print(F("\tppm\t H2 :"));Serial.print(H2);Serial.println(F("\tppm")); Serial.print(F(" NH3 :"));Serial.print(NH3);Serial.print(F("\tppm\t CH4 :"));Serial.print(CH4);Serial.println(F("\tppm")); Serial.print(F(" C3H8 :"));Serial.print(C3H8);Serial.print(F("\tppm\tC4H10:"));Serial.print(C4H10);Serial.println(F("\tppm")); Serial.print(F(" H2S :"));Serial.print(H2S);Serial.print(F("\tppm\t NO :"));Serial.print(NO);Serial.println(F("\tppm")); SerialBL.print(F(" CO2 :"));SerialBL.print(CO2);SerialBL.print(F("\tppm\t TVOC:"));SerialBL.print(TVOC);SerialBL.println(F("\tppm")); SerialBL.print(F(" CO :"));SerialBL.print(CO);SerialBL.print(F("\tppm\t NO2 :"));SerialBL.print(NO2);SerialBL.println(F("\tppm")); SerialBL.print(F("C2H5OH:"));SerialBL.print(C2H5OH);SerialBL.print(F("\tppm\t H2 :"));SerialBL.print(H2);SerialBL.println(F("\tppm")); SerialBL.print(F(" NH3 :"));SerialBL.print(NH3);SerialBL.print(F("\tppm\t CH4 :"));SerialBL.print(CH4);SerialBL.println(F("\tppm")); SerialBL.print(F(" C3H8 :"));SerialBL.print(C3H8);SerialBL.print(F("\tppm\tC4H10:"));SerialBL.print(C4H10);SerialBL.println(F("\tppm")); SerialBL.print(F(" H2S :"));SerialBL.print(H2S);SerialBL.print(F("\tppm\t NO :"));SerialBL.print(NO);SerialBL.println(F("\tppm")); // Serial.println(String(" CO :") + CO + "\tppm\t NO2 :" + TVOC + "\tppm"); // Serial.println(String("C2H5OH:") + C2H5OH + "\tppm\t H2 :" + H2 + "\tppm"); // Serial.println(String(" NH3 :") + NH3 + "\tppm\t CH4 :" + CH4 + "\tppm"); // Serial.println(String(" C3H8 :") + C3H8 + "\tppm\tC4H10:" + C4H10 + "\tppm"); // Serial.println(String(" H2S :") + H2S + "\tppm\t NO :" + NO + "\tppm"); // SerialBL.println(String(" CO2 :") + CO2 + "\tppm\t TVOC:" + TVOC + "\tppm"); // SerialBL.println(String(" CO :") + CO + "\tppm\t NO2 :" + TVOC + "\tppm"); // SerialBL.println(String("C2H5OH:") + C2H5OH + "\tppm\t H2 :" + H2 + "\tppm"); // SerialBL.println(String(" NH3 :") + NH3 + "\tppm\t CH4 :" + CH4 + "\tppm"); // SerialBL.println(String(" C3H8 :") + C3H8 + "\tppm\tC4H10:" + C4H10 + "\tppm"); // SerialBL.println(String(" H2S :") + H2S + "\tppm\t NO :" + NO + "\tppm"); }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
3、如何联系我们
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小丑西瓜9/article/detail/226002
推荐阅读
相关标签

