
- 1灰度世界算法
- 2改变人类数学史进程的15位世界顶尖大师经典 | 世界数学日书单
- 3centos7+python3+django2+,部署_file "/usr/lib64/python3.6/lib/python3.6/site-pack
- 4创业最前线:壁挂式RF智能睡眠监测器
- 5TypeScript 从零实现 axios 0x5 异常处理_reject(new axioserror_default("network error", axi
- 6Python地理数据处理 十六:arcpy批量生成缓冲区_arcpy 字段 缓冲
- 7KDD CUP 2021首届图神经网络大赛放榜,百度飞桨PGL获得2金1银_百度 kdd 2021
- 8类EMD的“信号分解方法”及MATLAB实现(第五篇)——ICEEMDAN_ceemdan matlab
- 9解决Mircsoft Edge按住Alt+Tab键后有好几个页面问题_alt+tab出现重复窗口
- 10客观看待mybatis 中使用 where 1=1_mybatis where 1=1
汇编基础1:arm交叉编译器的安装及arm寄存器和三级流水线_arm交叉编译工具链安装
赞
踩
1、arm交叉编译器的安装
sudo apt-get install gcc-arm-linux-gnueabihf
2、 arm交叉编译器的移除
sudo apt-get remove gcc-arm-linux-gnueabihf
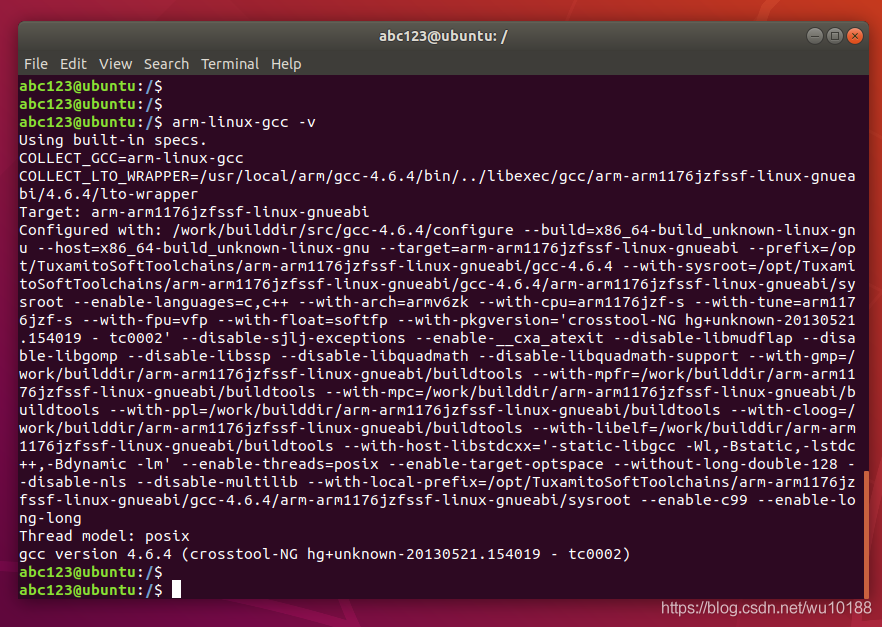
3、 检验是否安装成功,在 Terminal 输入以下命令输出版本信息
arm-linux-gcc -v
4、将可执行程序反汇编
1、arm-linux-gnueabihf-gcc assemble.c -o aa
arm-linux-gnueabihf-objdump -d aa2、arm-linux-gnueabihf-gcc -S assemble.c -o assemble.s
- ARM 寄存器组介绍
5、ARM 处理器
ARM 处理器一般共有 37 个寄存器,其中包括:
(1) 31 个通用寄存器,包括 PC(程序计数器)在内,都是 32 位的寄存器。
( 2 ) 6 个状态寄存器,都是 32 位的寄存器。
ARM 处理器共有 7 种不同的处理器模式:
用户模式(User),快速中断模式(FIQ),普通中断模式(IRQ),管理模式(Svc),数据访问中止模式(Abort),未定义指令中止模式(Und),系统模式(Sys),
在每一种处理器模式中有一组相应的寄存器。在任意一种处理器模式下,可见的寄存器包括 15 个通用寄存器(R0~R14)、一个或者二个状态寄存器以及程序计数器(PC)。在所有的寄存器中,有些是各模式共用同一个物理寄存器,有些寄存器是各个模式自己拥有独立的物理寄存器
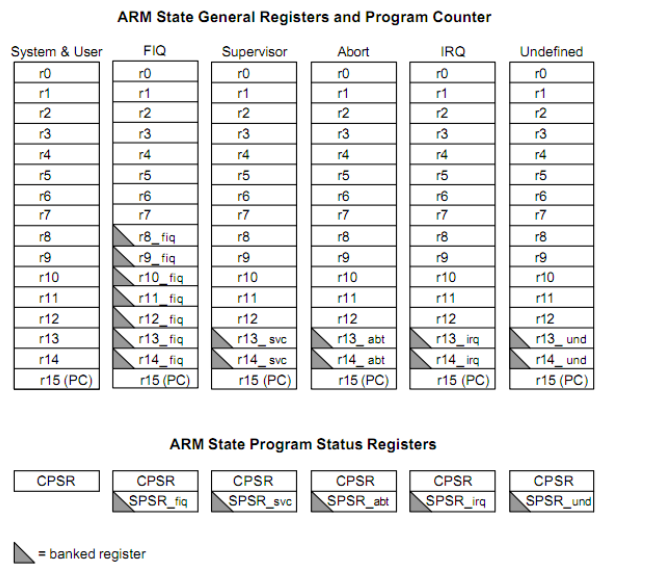
其中 r0~r3 主要用于子程序间传递参数, r4~r11 主要用于保存局部变量,但在 Thumb 程序中,通常只能使用 r4~r7来保存局部变量; r12 用作子程序间scratch 寄存器,即 ip 寄存器; r13 通常用做栈指针,即 sp; r14 寄存器又被称为连接寄存器(lr),用于保存子程序以及中断的返回地址; r15 用作程序计数器(pc),由于 ARM 采用了流水线机制,当正确读取了 PC 的值后,该值为当前指令地址加 8 个字节,即 PC 指向当前指令的下两条指令地址。
CPSR和SPSR都是程序状态寄存器,其中SPSR是用来保存中断前的CPSR中的值,以便在中断返回之后恢复处理器程序状态。
2.CPSR寄存器详解
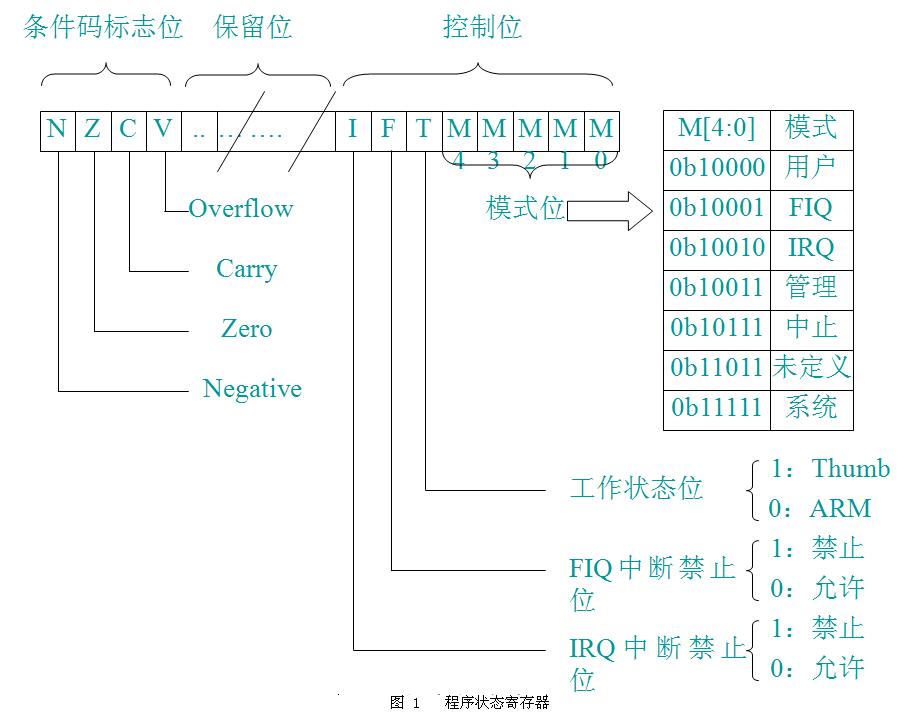
所有处理器模式下都可访问当前程序状态寄存器CPSR。CPSR中包含条件码标志、中断禁止位、当前处理器模式以及其他状态和控制信息。在每种异常模式下都有一个对用的程序状态寄存器SPSR。当异常出现时,SPSR用于保存CPSR的状态,以便异常返回后恢复异常发生时的工作状态。
(1)条件码标志
N、Z、C、V,最高4位称为条件码标志。ARM的大多数指令可以条件执行的,即通过检测这些条件码标志来决定程序指令如何执行。
各个条件码的含义如下:
N:在结果是有符号的二进制补码情况下,如果结果为负数,则N=1;如果结果为非负数,则N=0。
Z:如果结果为0,则Z=1;如果结果为非零,则Z=0。
C:其设置分一下几种情况:
对于加法指令(包含比较指令CMN),如果产生进位,则C=1;否则C=0。
对于减法指令(包括比较指令CMP),如果产生借位,则C=0;否则C=1。
对于有移位操作的非法指令,C为移位操作中最后移出位的值。
对于其他指令,C通常不变。
V:对于加减法指令,在操作数和结果是有符号的整数时,如果发生溢出,则V=1;如果无溢出发生,则V=0;对于其他指令,V通常不发生变化。
(2)控制位的作用在图1中可以看出,在这里就不阐述了。
二:CPSR与CPSR_c的区别
CPSR_c指的是CPSR的低8位控制位
CPSR有4个8位区域:标志域(F)、状态域(S)、扩展域(X)、控制域(C)
MSR - Load specified fields of the CPSR or SPSR with an immediate constant, or from the contents of a general-purpose register.
Syntax:
MSR{cond} <psr>_<fields>, #immed_8r MSR{cond} <psr>_<fields>, Rm where: cond is an optional condition code. <psr> is either CPSR or SPSR. <fields> specifies the field or fields to be moved. <fields> can be one or more of:
c control field mask byte (PSR[7:0]) x extension field mask byte (PSR[15:8]) s status field mask byte (PSR[23:16) f flags field mask byte (PSR[31:24]). immed_8r is an expression evaluating to a numeric constant. The constant must correspond to an 8-bit pattern rotated by an even number of bits within a 32-bit word. Rm is the source register.
C 控制域屏蔽字节(psr[7:0])
X 扩展域屏蔽字节(psr[15:8])
S 状态域屏蔽字节(psr[23:16])
F 标志域屏蔽字节(psr[31:24])
常用于MRS或MSR指令,用于psr中的值转移到寄存器或把寄存器的内容加载到psr中.
如:
MSR CPSR_c,#0xd3
6、三级流水线
流水线使用三个阶段,因此指令分为三个阶段执行:1.取指(从存储器装载一条指令);2.译码(识别将要被执行的指令);3.执行(处理指令并将结果写回寄存器)。
而R15(PC)总是指向“正在取指”的指令,而不是指向“正在执行”的指令或正在“译码”的指令。一般来说,人们习惯性约定将“正在执行的指令作为参考点”,称之为当前第一条指令,因此PC总是指向第三条指令。当ARM状态时,每条指令为4字节长,所以PC始终指向该指令地址加8字节的地址,即:PC值=当前程序执行位置+8;
其余流水线类比此处。
ARM流水线概述
流水线技术通过多个功能部件并行工作来缩短程序执行时间,提高处理器核的效率和吞吐率,从而成为微处理器设计中最为重要的技术之一。ARM7处理器核使用了典型三级流水线的冯·诺伊曼结构,ARM9系列则采用了基于五级流水线的哈佛结构。通过增加流水线级数简化了流水线各级的逻辑,进一步提高了处理器的性能。
ARM7的三级流水线在执行单元完成了大量的工作,包括与操作数相关的寄存器和存储器读写操作、ALU操作以及相关器件之间的数据传输。执行单元的工作往往占用多个时钟周期,从而成为系统性能的瓶颈。ARM9采用了更为高效的五级流水线设计,增加了2个功能部件分别访问存储器并写回结果,且将读寄存器的操作转移到译码部件上,使流水线各部件在功能上更平衡;同时其哈佛架构避免了数据访问和取指的总线冲突。
然而不论是三级流水线还是五级流水线,当出现多周期指令、跳转分支指令和中断发生的时候,流水线都会发生阻塞,而且相邻指令之间也可能因为寄存器冲突导致流水线阻塞,降低流水线的效率。本文在对流水线原理及运行情况详细分析的基础上,研究通过调整指令执行序列来提高流水线运行性能的方法。
ARM三级流水线

ARM7三级流水线结构

ARM7三级流水线状态

ARM7三级流水线举例
从上图,其实很容易看出,第一条指令:
add r0, r1,$5
执行的时候,此时PC已经指向第三条指令:
cmp r2,#3
的地址了,所以,是PC=PC+8。

