
- 1鸿蒙全新声明式UI框架ArkUI初体验,开发应用不错,比起flutter如何
- 2【WebGIS】leaflet入门-自定义MarkerIcon_leaflet marker
- 3罗辑思维2017-2018跨年演讲摘要_罗辑思维2017跨年演讲文字
- 4C# winForm utf8 gbk 相互转码小工具
- 5【数据库】索引 视图 触发器 分页查询
- 6高德地图js2.0使用MarkerCluster聚合点及添加点击事件_amap.markercluster
- 7VUE ———— Element Carousel 走马灯 源码分析与改写 (显示多张)_vue中走马灯显示多个图片
- 8【Linux学习】环境变量_普通用户环境变量
- 9Python 爬虫学习笔记(二)urllib下载图片和视频
- 10Claude 免注册教程_claude30天试用
发那科通信之MODBUSTCP(二)_发那科机器人modbustcp配置
赞
踩
小伙伴们大家好!
上篇文章介绍了发那科机器人的modbustcp通信基础,今天把机器人的实际配置以及汇川PLC与之通信的配置和程序发出来以供大家参考,小伙伴有问题可以微信俺哦(18336146667).。。。
话不多说,直接上硬菜!!!
一、首先是机器人的通信配置 modbustcp配置以及IO配置还是再唠叨一遍吧
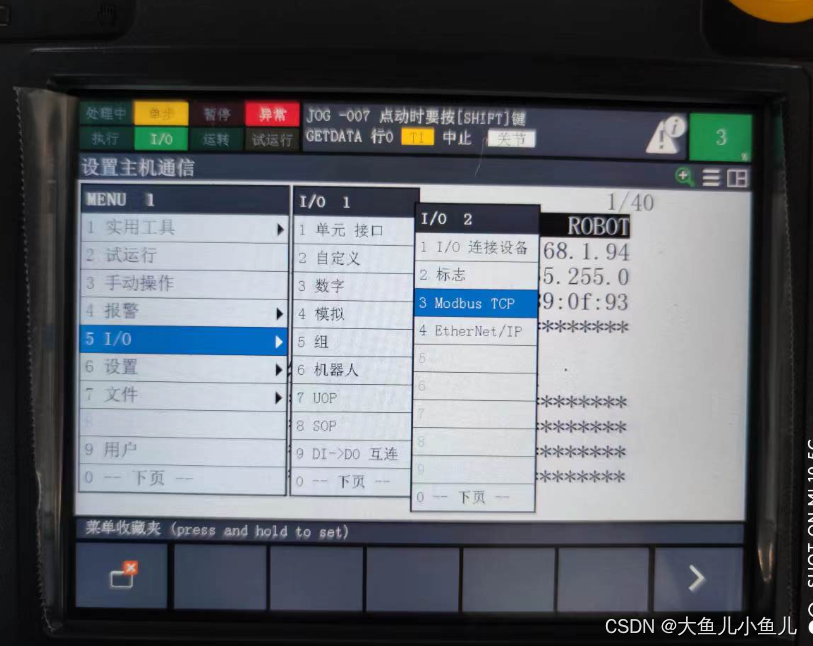
1. Modbus TCP配置 依次按下 MENU - IO - Modbus TCP进入tcp配置界面:
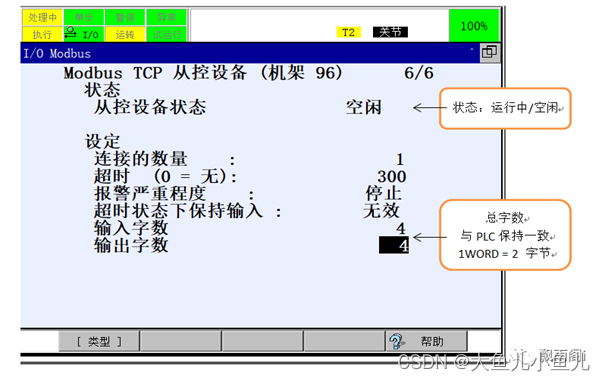 在DIDO分配界面出现,配置无效时,需要修改此处的数量。总数是32个字512个位,在没有扩展的情况下。这里默认的是通信配置4个字。
在DIDO分配界面出现,配置无效时,需要修改此处的数量。总数是32个字512个位,在没有扩展的情况下。这里默认的是通信配置4个字。
2.Modbus TCP配置IO 依次按下 MENU - IO - 数字 进入IO监控配置界面-按下分配进入IO分配界面-利用IN/OUT进行切换DI和DO。
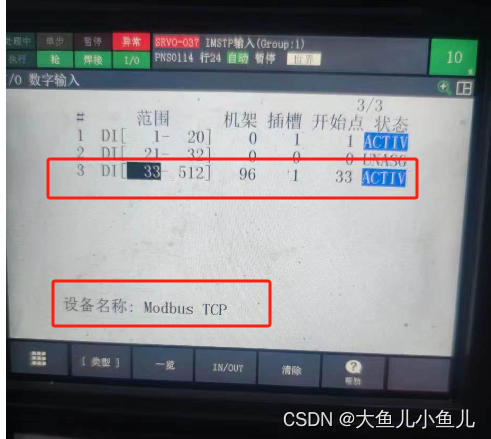
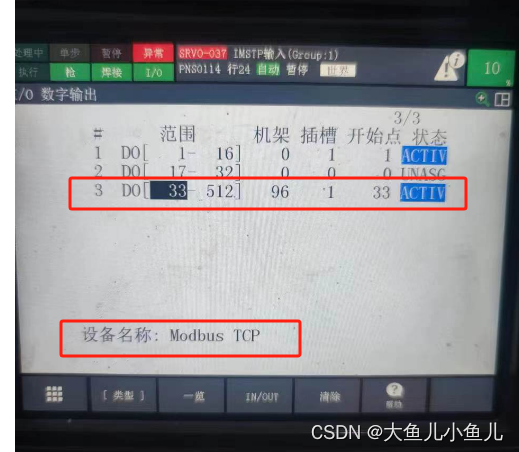
再按下类型 弹出如下话框,有数字-模拟-组-机器人-UOP 的配置设定,我们PLC与其通信需要配置数字项(参考上图哦),组项,UOP项。

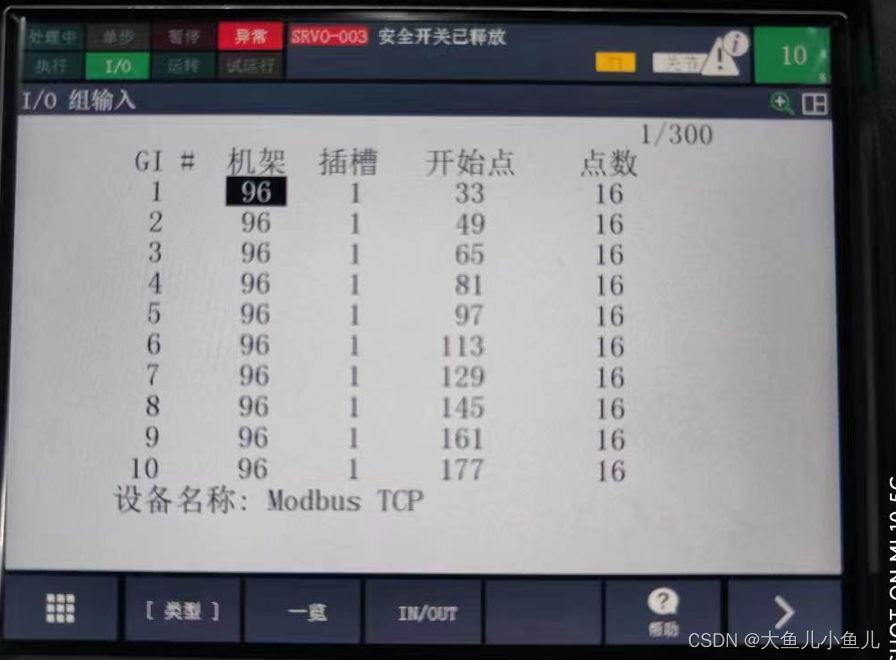
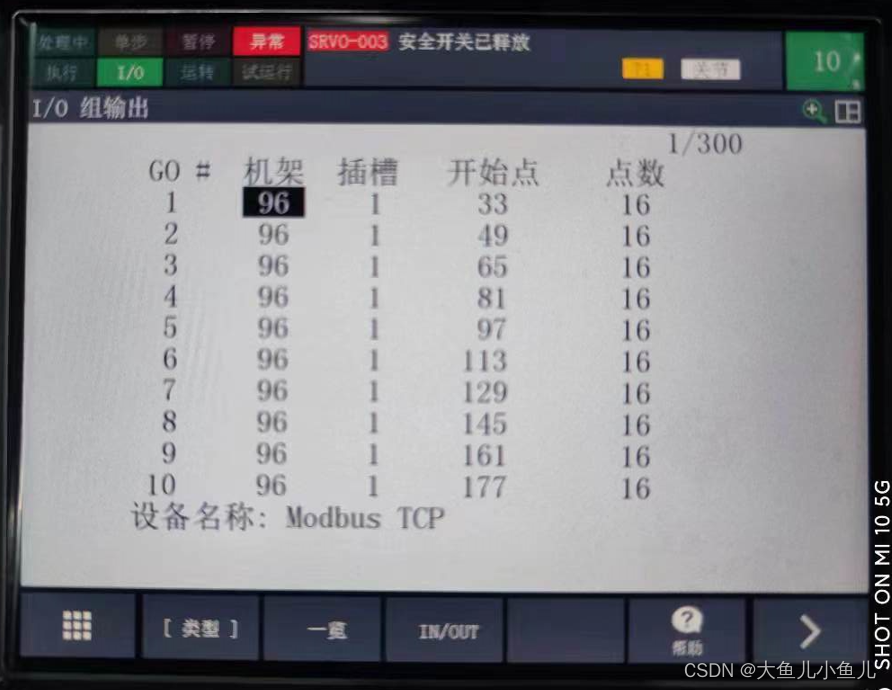
3、 机器人IO分配第7项-组(发那科机器人变量组相当于字==16个位),分配地址从GI1开始到GI300结束(GO照旧),GI表示机器人输入点DI的组合>I/O组输入,GO表示机器人输出点DO的组合>I/O组输出。
如下图:机架配置==96 (表示ModbusTcp通信),插槽位配置==1,开始点==这个组是从DI或者DO的哪一个点位开始,点数==16(一个字16个位)。
重点提示::开始点位不能出错哦!!
特别提示:为什么从33开始,因为在前面数字IO分配时,我把前面1-32的32个点位留给机器人本地使用了。
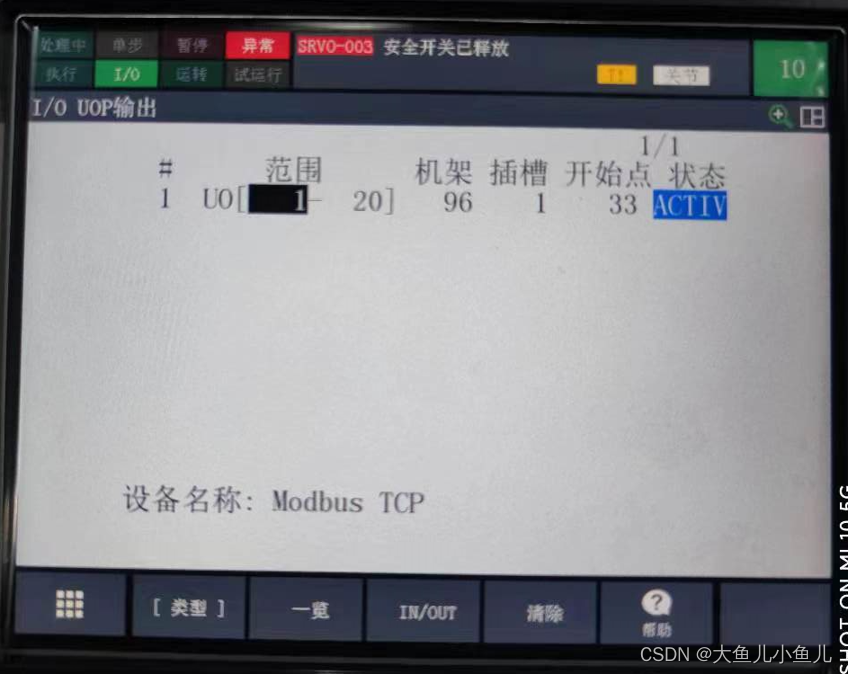
4、机器人UOP变量配置 UOP是机器人系统IO,PLC控制机器人启停通过UI,然后机器人通过UO将机器人状态反馈给PLC等外部设备。
此处必须进行UI和UO进行分配给MODBUSTCP,,机架==96,开始点==33

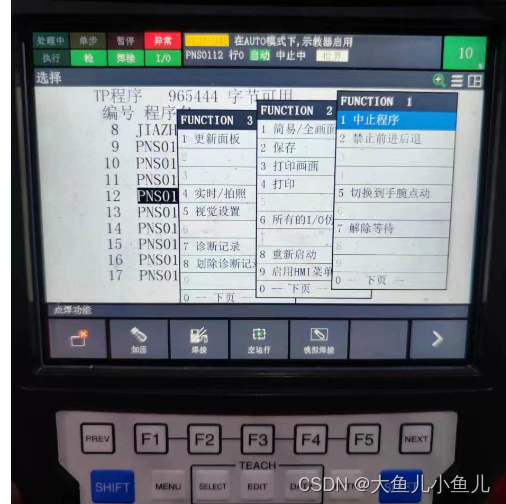
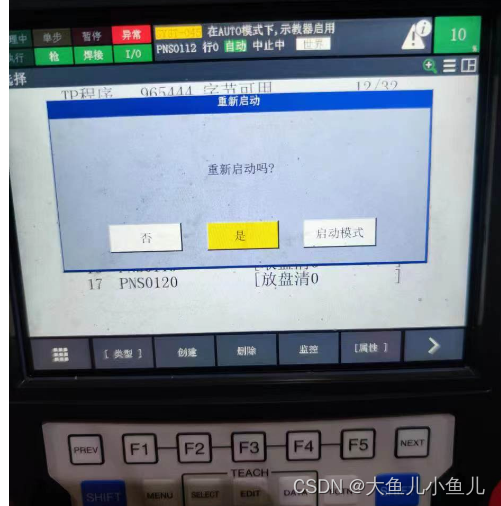
 分配完成后,必须进行机器人重启>按下FCTN功能键>选择中间页第8项>重启系统>选择是即可。
分配完成后,必须进行机器人重启>按下FCTN功能键>选择中间页第8项>重启系统>选择是即可。
不明白请参考下图:::::

二. 汇川Easy PLC通信配置
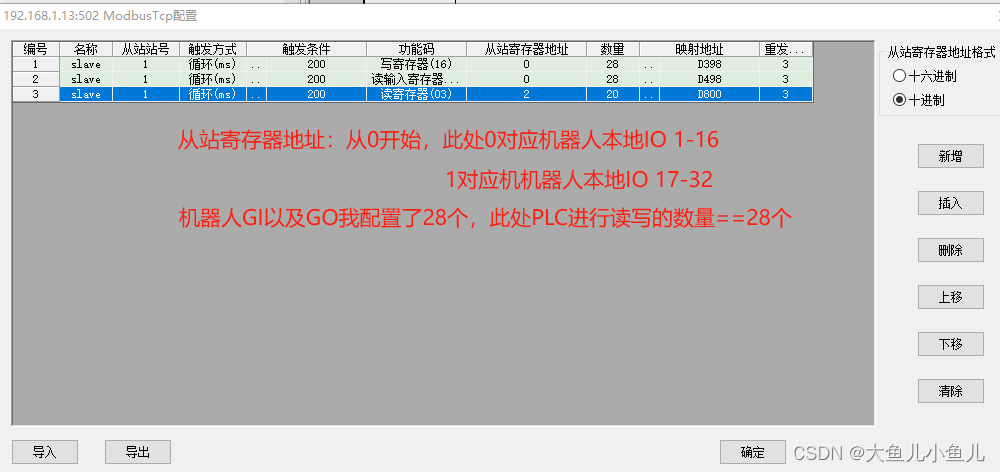 映射地址根据自己需求进行规划和分配哦。。。
映射地址根据自己需求进行规划和分配哦。。。
项目已经运行中,通信的数据这里就不截图了哈。。。
希望对小伙伴们有帮助!!!

