
热门标签
热门文章
- 1(神经网络)MNIST手写体数字识别MATLAB完整代码_mnist matlab
- 2调研120+模型!腾讯AI Lab联合京都大学发布多模态大语言模型最新综述
- 3安装tokenizers拓展包_tokenizers-0.15.0.tar.gz
- 4解决VMvare仅主机模式下宿主机与虚拟机互相ping不通的问题_三台仅主机模式的虚拟机,两台与主机通,一台与主机不通,什么情况
- 5ASM 和 LVM
- 6mmsegmentation自定义数据集_mmseg 2class
- 7机器学习入门教程_机器学习 教程
- 8只要一个软件让电脑硬盘瞬间扩容10T空间 | 阿里云盘变本地硬盘。
- 9Android实现新闻列表
- 10AI算法工程师 | 01人工智能基础-快速入门_人工智能算法
当前位置: article > 正文
Mnist手写数字识别cpu训练与gpu训练_minist手写字体识别可以在cpu上跑吗
作者:小丑西瓜9 | 2024-03-30 06:11:41
赞
踩
minist手写字体识别可以在cpu上跑吗
代码是在github上找的学习使用,以下是我学习深度学习时的一个笔记,将cpu上跑的手写数字识别的代码改为gpu上运行,以提高运行效率。
Mnist数据集官网:数据集下载
有一篇博主的文章总结的比较好:如何在GPU上运行pytorch程序
一、方法
1、开始前声明
在代码前加上
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
- 1
有多个GPU可选择具体GPU进行调用,使用第几块就选择第几块。
import os
os.environ["CUDA_DEVICE_ORDER"]="PCI_BUS_ID"
os.environ["CUDA_VISIBLE_DEVICES"]='1'
- 1
- 2
- 3
2、将模型放到GPU上
在实体化网络的时候使用
net=Net()
net.to(device)
- 1
- 2
3、将数据和标签放到GPU上
inputs, labels = data[0].to(device), data[1].to(device)
- 1
或者
inputs, labels= inputs.to(device),labels.to(device)
- 1
做完以上三步,代码应该就能正常在GPU上训练了。
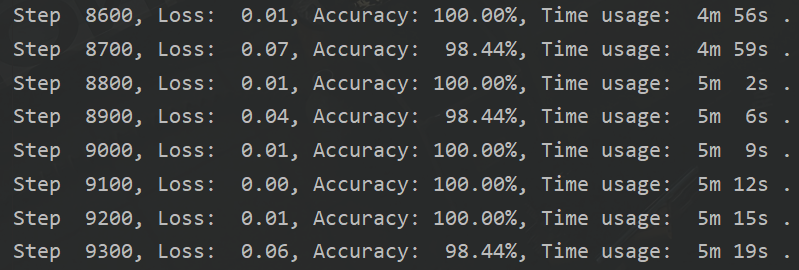
二、CPU训练
import torch from torchvision import datasets, transforms import torch.nn as nn import torch.optim as optim from datetime import datetime class Config: batch_size = 64 epoch = 10 momentum = 0.9 alpha = 1e-3 print_per_step = 100 class LeNet(nn.Module): def __init__(self): super(LeNet, self).__init__() # 3*3的卷积 self.conv1 = nn.Sequential( nn.Conv2d(1, 32, 3, 1, 2), #kernel_size卷积核大小 stride卷积步长 padding特征图填充 nn.ReLU(), nn.MaxPool2d(2, 2) ) self.conv2 = nn.Sequential( nn.Conv2d(32, 64, 5), nn.ReLU(), nn.MaxPool2d(2, 2) #2*2的最大池化层 ) self.fc1 = nn.Sequential( nn.Linear(64 * 5 * 5, 128), nn.BatchNorm1d(128), nn.ReLU() ) self.fc2 = nn.Sequential( nn.Linear(128, 64), nn.BatchNorm1d(64), # 加快收敛速度的方法(注:批标准化一般放在全连接层后面,激活函数层的前面) nn.ReLU() ) self.fc3 = nn.Linear(64, 10) def forward(self, x): x = self.conv1(x) x = self.conv2(x) x = x.view(x.size()[0], -1) x = self.fc1(x) x = self.fc2(x) x = self.fc3(x) return x class TrainProcess: def __init__(self): self.train, self.test = self.load_data() self.net = LeNet() self.criterion = nn.CrossEntropyLoss() # 定义损失函数 self.optimizer = optim.SGD(self.net.parameters(), lr=Config.alpha, momentum=Config.momentum) @staticmethod def load_data(): print("Loading Data......") """加载MNIST数据集,本地数据不存在会自动下载""" train_data = datasets.MNIST(root='./data/', train=True, transform=transforms.ToTensor(), download=True) test_data = datasets.MNIST(root='./data/', train=False, transform=transforms.ToTensor()) # 返回一个数据迭代器 # shuffle:是否打乱顺序 train_loader = torch.utils.data.DataLoader(dataset=train_data, batch_size=Config.batch_size, shuffle=True) test_loader = torch.utils.data.DataLoader(dataset=test_data, batch_size=Config.batch_size, shuffle=False) return train_loader, test_loader def train_step(self): steps = 0 start_time = datetime.now() print("Training & Evaluating......") for epoch in range(Config.epoch): print("Epoch {:3}".format(epoch + 1)) for data, label in self.train: data, label = Variable(data.cpu()), Variable(label.cpu()) self.optimizer.zero_grad() # 将梯度归零 outputs = self.net(data) # 将数据传入网络进行前向运算 loss = self.criterion(outputs, label) # 得到损失函数 loss.backward() # 反向传播 self.optimizer.step() # 通过梯度做一步参数更新 # 每100次打印一次结果 if steps % Config.print_per_step == 0: _, predicted = torch.max(outputs, 1) correct = int(sum(predicted == label)) accuracy = correct / Config.batch_size # 计算准确率 end_time = datetime.now() time_diff = (end_time - start_time).seconds time_usage = '{:3}m{:3}s'.format(int(time_diff / 60), time_diff % 60) msg = "Step {:5}, Loss:{:6.2f}, Accuracy:{:8.2%}, Time usage:{:9}." print(msg.format(steps, loss, accuracy, time_usage)) steps += 1 test_loss = 0. test_correct = 0 for data, label in self.test: data, label = Variable(data.cpu()), Variable(label.cpu()) outputs = self.net(data) loss = self.criterion(outputs, label) test_loss += loss * Config.batch_size _, predicted = torch.max(outputs, 1) correct = int(sum(predicted == label)) test_correct += correct accuracy = test_correct / len(self.test.dataset) loss = test_loss / len(self.test.dataset) print("Test Loss: {:5.2f}, Accuracy: {:6.2%}".format(loss, accuracy)) end_time = datetime.now() time_diff = (end_time - start_time).seconds print("Time Usage: {:5.2f} mins.".format(time_diff / 60.)) if __name__ == "__main__": p = TrainProcess() p.train_step()

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
三、GPU训练
import torch from torchvision import datasets, transforms import torch.nn as nn import torch.optim as optim from datetime import datetime # 添加 device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu") # 添加 class Config: batch_size = 64 epoch = 10 momentum = 0.9 alpha = 1e-3 print_per_step = 100 class LeNet(nn.Module): def __init__(self): super(LeNet, self).__init__() # 3*3的卷积 self.conv1 = nn.Sequential( nn.Conv2d(1, 32, 3, 1, 2), #kernel_size卷积核大小 stride卷积步长 padding特征图填充 nn.ReLU(), nn.MaxPool2d(2, 2) ) self.conv2 = nn.Sequential( nn.Conv2d(32, 64, 5), nn.ReLU(), nn.MaxPool2d(2, 2) #2*2的最大池化层 ) self.fc1 = nn.Sequential( nn.Linear(64 * 5 * 5, 128), nn.BatchNorm1d(128), nn.ReLU() ) self.fc2 = nn.Sequential( nn.Linear(128, 64), nn.BatchNorm1d(64), # 加快收敛速度的方法(注:批标准化一般放在全连接层后面,激活函数层的前面) nn.ReLU() ) self.fc3 = nn.Linear(64, 10) def forward(self, x): x = self.conv1(x) x = self.conv2(x) x = x.view(x.size()[0], -1) x = self.fc1(x) x = self.fc2(x) x = self.fc3(x) return x class TrainProcess: def __init__(self): self.train, self.test = self.load_data() #修改 self.net = LeNet().to(device) #修改 self.criterion = nn.CrossEntropyLoss() # 定义损失函数 self.optimizer = optim.SGD(self.net.parameters(), lr=Config.alpha, momentum=Config.momentum) @staticmethod def load_data(): print("Loading Data......") """加载MNIST数据集,本地数据不存在会自动下载""" train_data = datasets.MNIST(root='./data/', train=True, transform=transforms.ToTensor(), download=True) test_data = datasets.MNIST(root='./data/', train=False, transform=transforms.ToTensor()) # 返回一个数据迭代器 # shuffle:是否打乱顺序 train_loader = torch.utils.data.DataLoader(dataset=train_data, batch_size=Config.batch_size, shuffle=True) test_loader = torch.utils.data.DataLoader(dataset=test_data, batch_size=Config.batch_size, shuffle=False) return train_loader, test_loader def train_step(self): steps = 0 start_time = datetime.now() print("Training & Evaluating......") for epoch in range(Config.epoch): print("Epoch {:3}".format(epoch + 1)) for data, label in self.train: # 修改 data, label = data.to(device),label.to(device) # 修改 self.optimizer.zero_grad() # 将梯度归零 outputs = self.net(data) # 将数据传入网络进行前向运算 loss = self.criterion(outputs, label) # 得到损失函数 loss.backward() # 反向传播 self.optimizer.step() # 通过梯度做一步参数更新 # 每100次打印一次结果 if steps % Config.print_per_step == 0: _, predicted = torch.max(outputs, 1) correct = int(sum(predicted == label)) accuracy = correct / Config.batch_size # 计算准确率 end_time = datetime.now() time_diff = (end_time - start_time).seconds time_usage = '{:3}m{:3}s'.format(int(time_diff / 60), time_diff % 60) msg = "Step {:5}, Loss:{:6.2f}, Accuracy:{:8.2%}, Time usage:{:9}." print(msg.format(steps, loss, accuracy, time_usage)) steps += 1 test_loss = 0. test_correct = 0 for data, label in self.test: # 修改 data, label = data.to(device),label.to(device) # 修改 outputs = self.net(data) loss = self.criterion(outputs, label) test_loss += loss * Config.batch_size _, predicted = torch.max(outputs, 1) correct = int(sum(predicted == label)) test_correct += correct accuracy = test_correct / len(self.test.dataset) loss = test_loss / len(self.test.dataset) print("Test Loss: {:5.2f}, Accuracy: {:6.2%}".format(loss, accuracy)) end_time = datetime.now() time_diff = (end_time - start_time).seconds print("Time Usage: {:5.2f} mins.".format(time_diff / 60.)) if __name__ == "__main__": p = TrainProcess() p.train_step()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
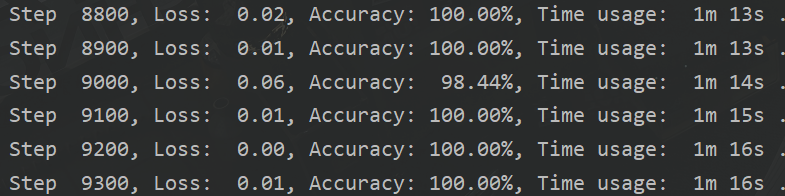
感受下时间的差距
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小丑西瓜9/article/detail/339398
推荐阅读
相关标签

