
- 1SpringBoot集成自然语言处理hanlp工具包_springboot 集成hanlp
- 2【GlobalMapper精品教程】022:根据一个字段属性值批量计算另一个字段属性值(地类名称求地类编码)_arcgis 计算 不同编码
- 3【AcWing】蓝桥杯集训每日一题Day14|Flood Fill|洪水灌溉算法|DFS|并查集|687.扫雷(C++)
- 4【Hadoop】Hadoop车辆数据存储_基于hadoop的公共自行车数据分布式存储和计算
- 5Django高级扩展之中间件
- 6头歌 实验六 java输入输出_本关任务:从文件读取一篇英语文章,然后统计26个英文字母出现的次数。
- 7【无标题】嘻嘻嘻嘻嘻嘻嘻_max_energy_0 = torch.max(energy, -1, keepdim=true)
- 8机器翻译评测----BLEU算法_bleu机器翻译
- 9【python】flask模板渲染引擎Jinja2,流程控制语句与过滤器的用法剖析与实战应用
- 10测试人员前期参与设计方案时需要注意什么?
ESP32(MicroPython) 四足机器人(一)_四足机器人寻迹esp32
赞
踩
最近决定研究一下四足机器人,但市面上的产品,要么性价比低,要么性能达不到要求。本人就另外买了零件,安装到之前的一个麦克纳姆轮底盘的底板上。(轮子作为装饰,使用铜柱固定)
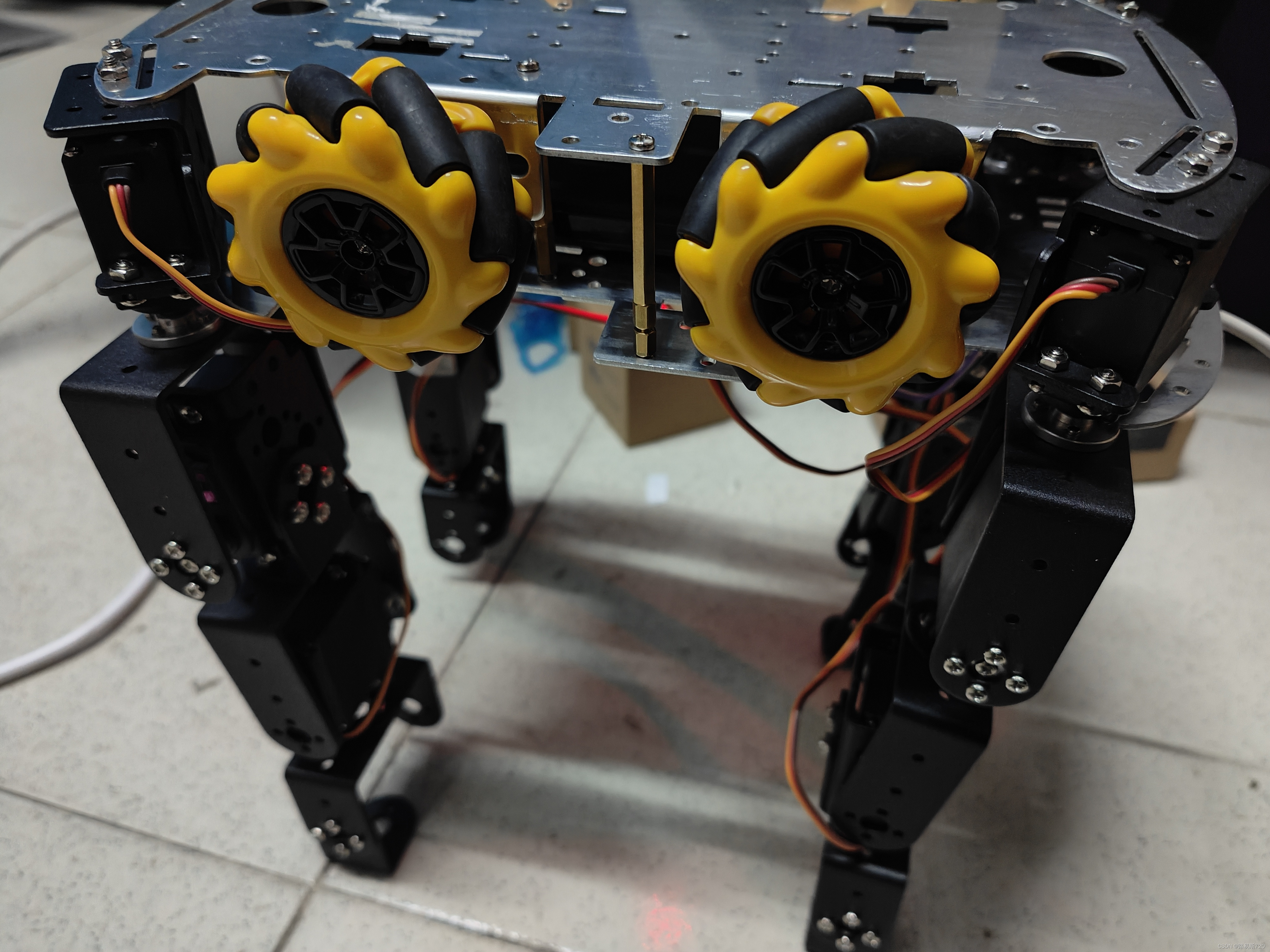 舵机使用MG996R,舵机驱动为PCA9685。考虑到之前提到的PCA9685对电压稳定性要求高的问题,供电采用USB二拖一方案,目前功率达到20w,但还是不够用。后续增加5v3a的充电宝,并改用性能更高的杜邦线,如果功率仍然不足就考虑其它方案。
舵机使用MG996R,舵机驱动为PCA9685。考虑到之前提到的PCA9685对电压稳定性要求高的问题,供电采用USB二拖一方案,目前功率达到20w,但还是不够用。后续增加5v3a的充电宝,并改用性能更高的杜邦线,如果功率仍然不足就考虑其它方案。
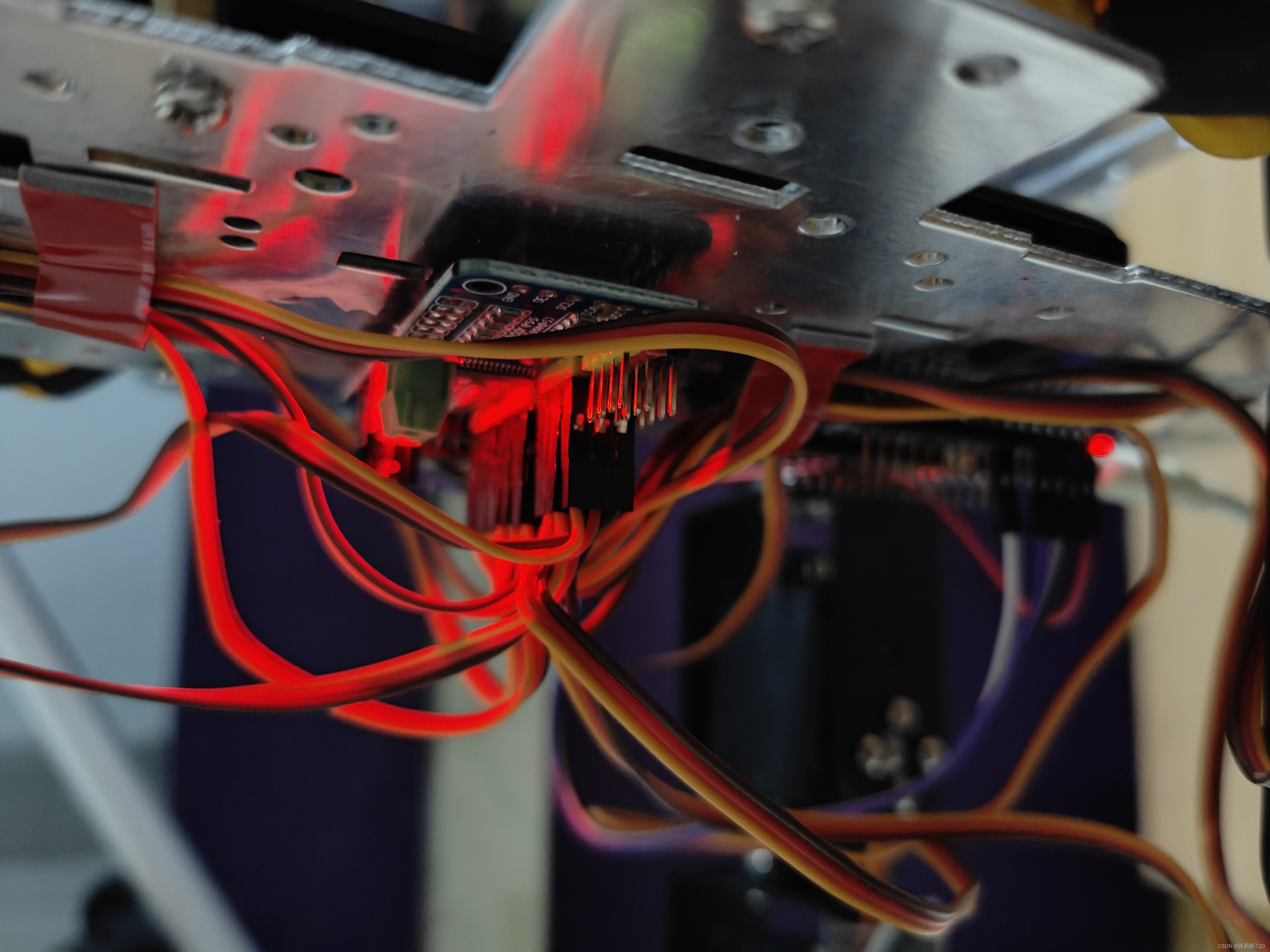
由于舵机线长度不足,PCA9685安装在底部,后续会增加舵机延长线。舵机连接到PCA9685的顺序按序号增大依次为左前、右前、左后、右后,依次连接上、中、下三层舵机。最下一层舵机在上图位置的角度为120度,其余均为90度,这样安排主要考虑到在四足弯曲时能有更大运动空间。组装后还遇到一些问题:顶部的转向舵机的螺丝容易松,加了垫片也没有解决;部分舵机虚位明显。这部分问题暂时处理不了。
测试程序如下
import time
from machine import SoftI2C,Pin
from servo import Servos
i2c=SoftI2C(sda=Pin(9),scl=Pin(8),freq=10000)
servos=Servos(i2c,address=0x40)
servos.position(0,90)
servos.position(1,90)
servos.position(2,90)
servos.position(3,90)
servos.position(4,90)
servos.position(5,90)
servos.position(6,90)
servos.position(7,90)
servos.position(8,120)
servos.position(9,120)
servos.position(10,120)
servos.position(11,120)
由于开发周期较长,四足机器人系列会分多期发布。

