
- 1Idea拉取master代码时显示Move or commit them before merge问题及解决方案
- 2[大模型]ChatGLM3-6B 微调实践
- 3【Java】 GUI实战案例——使用swing编写计算器_参照windows附件的计算器,使用swing技术编程实现简易的计算器功能。
- 4智慧农业:数字乡村推动农业现代化
- 5嵌入式的坑在哪方面?
- 6Open3D(C++) 三维点云边界提取_c++下三维点云提取算法实现
- 7【炫酷登录界面】详解5款高级的前端登录页面及实现源码(附完整源码)_好看的前端页面
- 8C语言 —— 嵌套循环语句的用法
- 9python天气数据分析与处理,python天气数据分析论文_csdn 天气预报分析论文怎么做
- 10neo4j 简单的图谱展示_孙悟空知识图谱neo4j
ODrive踩坑(五)ODrive驱动云台电机、低齿槽转矩电机实现高精度定位
赞
踩
前几篇介绍了ODrive在Windows下的使用环境搭建,驱动3508 / 5008无刷电机、TLE5012B、AS5047P的ABI编码器配置、AS5047P-SPI绝对值编码器配置。
ODrive踩坑(一)windows下使用环境的搭建,odrivetool及USB驱动的安装
ODrive踩坑(二)电机和编码器参数配置、校准、位置闭环模式转动电机(TLE5012B - ABI)
ODrive踩坑(三)ODrive配置使用AS5047P磁编码器的ABI接口
ODrive踩坑(四)ODrive配置AS5047P-SPI绝对值磁编码器,不需每次上电校准无刷电机,直接上电可用
一、航模无刷电机空载的定位精度问题
先前用ODrive驱动的电机,都是些航模无刷电机,高压 高转速 大功率,响应迅速并且能很好的进行闭环控制。不过使用的体验并没那么完美。差的地方主要体现在空载的定位精度不好,即使PI调节的很细致,空载时也多少有那么一点静差。而且效果因电机而异:尺寸小的电机,一般KV值大,定位效果也不好;尺寸大的电机,KV小,定位效果相对较好。
使用普通航模电机,引起空载时定位精度差的主要原因有:电机磁极对数较少、齿槽转矩过大。
-
电机磁极对数较少这个好理解,查电机的磁瓦数量呗,多就是多少就是少,像航模电机大多数都喜欢使用7对极。也通常与电机尺寸有关,大尺寸电机更容易安放更多的磁极,相对的磁极越多KV值也就越小。 -
齿槽转矩指的是 永磁电机绕组不通电时,永磁体和铁芯之间相互作用产生的转矩。它的产生来源于永磁体和铁芯,这种力试图将它们对齐。轻轻转一下电机轴,就能判断一个电机齿槽转矩的大与小。
航模电机 的 齿槽转矩通常较大。用手转动的 挫顿感 越强,齿槽转矩就较大,也就越不适合用在需要 空载高精度定位 的场合。
对于运动阻尼小、需要高精度定位 的应用,可以选用专门设计的电机,像云台电机。这类电机一般 磁极对数较多、相电阻偏大、磁极或者绕组可能特意优化过,以降低齿槽转矩,可以实现更高精度的定位。一般为扁平的外形,便于直驱载荷。不经过减速,就没有机械回差的影响。
二、云台电机测试
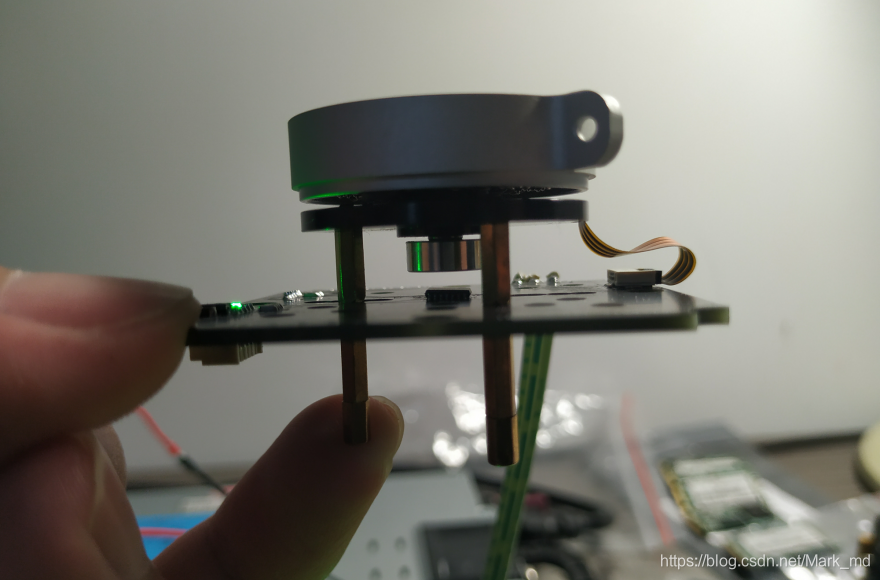
从最近收到的一批云台电机说起,起初购买是图它尾部自带的磁钢,想着 配合磁编码器芯片进行闭环位置定位。以前都是拿普通电机在轴的尾部用胶水粘贴强磁,同心度完全看天意,而且也说不定哪天就掉了。而换成这种带磁铁安装卡座的电机,就没了安装上的顾虑,使用起来更为方便。
经过一番测试,电机意外的好用。特点与上面说的一致,相电阻大、所需的驱动电流小,低转速大扭矩。最关键的是齿槽转矩小,小到几乎没有 挫顿感 ,进而运行起来异常丝滑,没有大电机的那种空载一卡一卡的情况,定位非常精准,闭环稳定后几乎没有静差。
起初想看看里面的磁瓦数量,来确定极对数。但从外面很难看到里面,想卸掉底部的磁极和卡座,然后把转子卸下来。结果轴的尾部是设计过的,有一块突起,想要卸下转子只能从上面将轴敲下来。搞不定,不过勉强从缝隙中能看到转子的磁极,根本没有瓦片,是一整个环状…整个人傻了
无奈,只能换一种方法。将一相通直流电,转动转子,转一周有7个卡顿的位置,也就是说它是7对极。


安装在以前的 万能电机转接板上,再将三相FPC排线转换成2.54的插针,便于引出。
打个小广告。
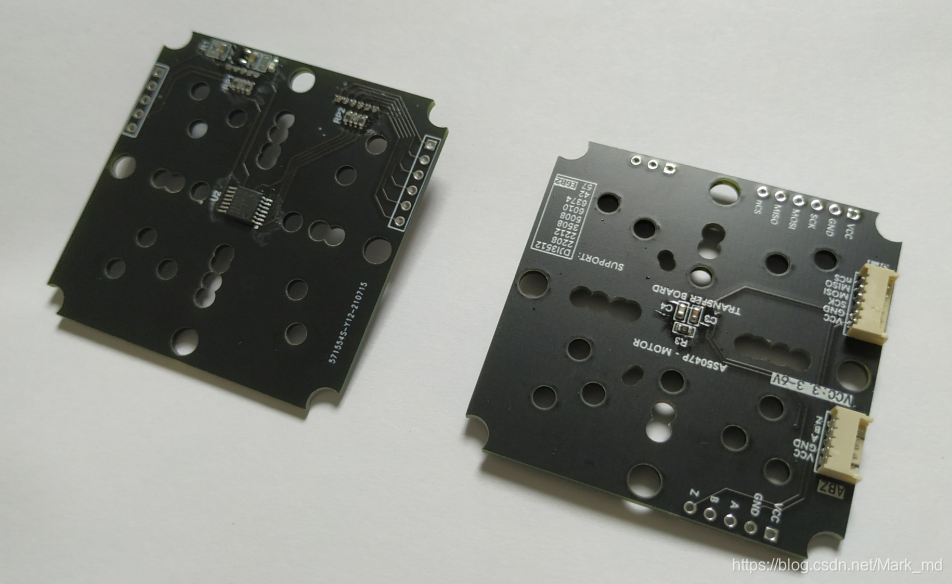
为了方便测试 AS5047P-SPI绝对值编码器,也便于扩展不同的电机,就有了下面这块万能转接板,支持 2208、2212、3508、5008、6010、6374、42步进、57步进 等不同电机的定位安装。
图中AS5047P转接板购买链接,我的淘宝小店:AS5047P SPI磁编码器 3206云台无刷电机 带径向磁铁 Odrive电机
店铺详情内有安装孔位、原理图、教程、资料,手机端可能因没做适配看不到,建议用电脑打开。


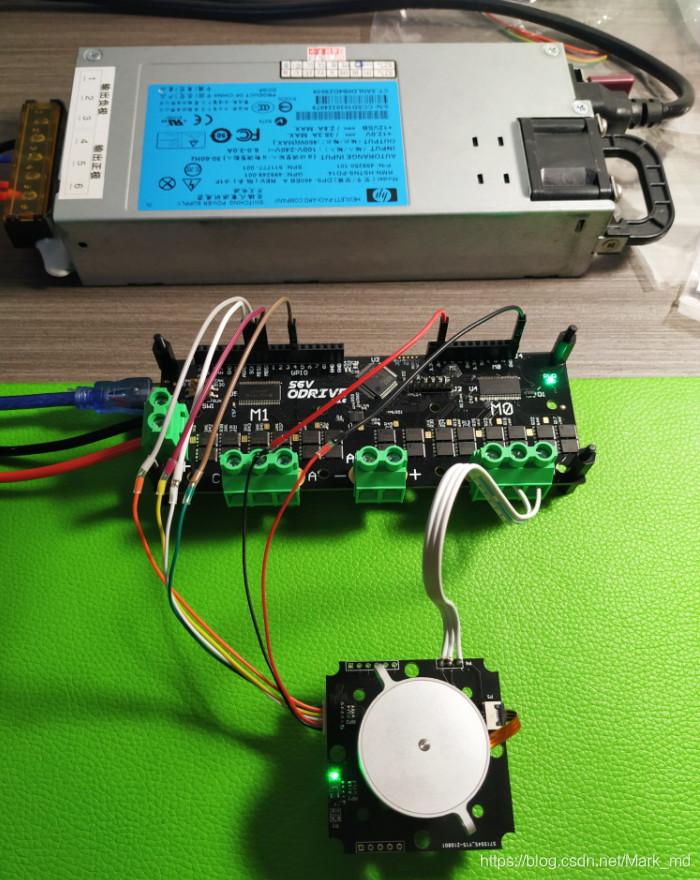
根据选择的 编码器类型,选择合适的接线方式,我用的是 AS5047P-SPI绝对值磁编码器,接线及配置方法参照本专栏第(四)章节。
既然也是7对极,那电机参数和控制器参数也先按照之前的配置。测试后发现控制效果竟然出奇的好,之前调出来的真是万能参数。๑乛◡乛๑嘿嘿
三、ODrive配置
-
首先根据自己的
编码器类型,照着本专栏的的(二)(三)或(四)撸一遍配置。
例如:
TLE5012B-E1000,ABI接口,按照(二)配置。
AS5047P,ABI接口,按照(三)配置。
AS5047P,SPI接口,按照(四)配置。(可在校准一次编码器后直接上电使用,不用像ABI编码器要每次上电都校准) -
仅进行其中的
主板参数配置、电机参数配置、编码器参数配置、控制器参数配置即可,电机和编码器校准要另外配置。
- 进行
电机和编码器校准前,需要先更改云台电机的电流和电机类型。
# 配置过流保护阈值(A)
odrv0.config.dc_max_positive_current = 6.0
# 配置电机0的电流采样阈值(A)
odrv0.axis0.motor.config.requested_current_range = 10
# 配置电机0的限制电流(A)(根据自己电机的额定电流更改)
odrv0.axis0.motor.config.current_lim = 3
# 配置电机0校准时的电流阈值(根据自己电机的负载状况酌情配置)(A)
odrv0.axis0.motor.config.calibration_current = 3
# 配置电机0类型。
# 目前支持两种电机:大电流电机(MOTOR_TYPE_HIGH_CURRENT)和云台电机(MOTOR_TYPE_GIMBAL)
odrv0.axis0.motor.config.motor_type = MOTOR_TYPE_GIMBAL
# 保存参数
odrv0.save_configuration()
# 重启驱动器
odrv0.reboot()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
四、电机和编码器校准
校准云台电机的编码器。
# 测试AS5047P-SPI磁编码器能否正常读数(手动拨动下电机)
odrv0.axis0.encoder.shadow_count
# 如上述读数始终为0,建议断电重启,再重新检查编码器读数是否正常
# 进行校准,(运行后,电机会正转一圈再反转一圈)
# 注意这个指令跟先前用的都不一样
odrv0.axis0.requested_state = AXIS_STATE_FULL_CALIBRATION_SEQUENCE
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
之后进入闭环模式,电机会保持位置,用手扭动电机,电机会产生反抗并回到原来位置:
# 配置电机为闭环模式
odrv0.axis0.requested_state = AXIS_STATE_CLOSED_LOOP_CONTROL
- 1
- 2
测试运动。电机会按照之前设置的梯形轨迹运行到指定位置:
# 控制电机运行到10圈的位置
odrv0.axis0.controller.input_pos = 10
# 控制电机运行到0圈的位置
odrv0.axis0.controller.input_pos = 0
- 1
- 2
- 3
- 4
- 5
经过上面的校准后,ODrive已经能够驱动云台电机,并用AS5047P磁编码器进行闭环控制。
但并不会在重启后自动进入闭环,仍需在重启后手动进入闭环,略有不便。下面设置上电自动进入闭环运行。
# 设置电机预校准。(不用每次上电都哔~的一声)
# 驱动器会将本次校准值保存,避免上电启动后自动校准,以加快启动速度。
odrv0.axis0.motor.config.pre_calibrated = True
# 设置编码器预校准。(不用每次上电都右转一圈又左转一圈)
# 驱动器会将本次校准值保存,避免上电启动后自动校准,以加快启动速度。
odrv0.axis0.encoder.config.pre_calibrated = True
# 设置ODrive上电启动时,自动进入闭环模式
odrv0.axis0.config.startup_closed_loop_control = True
# 保存参数
odrv0.save_configuration()
# 重启驱动器
odrv0.reboot()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
运动过程丝滑流畅,齿槽转矩小的体验就是不一样。定位效果超级好,稳定后几乎没有静差。
不过跟先前的几个电机一样,闭环运行时的噪音较大,估计参数还要再重调一次。
五、错误修复、注意事项
多用odrv0.axis0.error去检错,多用odrv0.axis0.motor、odrv0.axis0.encoder去检查参数。
用odrv0.axis0.encoder.shadow_count可以测试AS5047P-SPI磁编码器能否正常读数。
odrv0.vbus_voltage:检查ODrive的供电电压。
如果你的ODrive无法正常工作,用如下查看错误列表:
dump_errors(odrv0) 查看错误
dump_errors(odrv0, True) 清除错误(如果报错ODrive不会继续执行电机旋转指令)
如需重新对 AS5047P 进行软硬件设计,有以下文章可供参考:
AS5047P磁编码器应用设计大全解:硬件电路设计、SPI通信时序、逻辑波形分析、注意事项

