
热门标签
热门文章
- 1master 合并到dev_合并代码 master挪到dev
- 2STM32CubeMX学习(二) USB CDC 双向通信_cubemx usb接收
- 3数据结构(C语言):删除单链表中值为x的所有结点_在单链表中删除指针p所指的x结点
- 4【Java】HashMap的简单使用(含小部分源码,get报错问题)_java中map的get方法返回的类型不对
- 5<Python的语句>——《Python》_python 》》》
- 6华为OD机试 - 螺旋数字矩阵(Java &; JS &; Python &; C &; C
- 7【C语言】万字详讲操作符
- 8day04_JDBC_课后练习 - 参考答案(一共11道练习题)
- 910分钟搞懂LLMOps
- 10区块链安全初探(二):区块链的层次
当前位置: article > 正文
六自由度Stewart并联机器人运动学逆解(MATLAB学习)_六自由度stewart平台的matlab可视化模型
作者:小丑西瓜9 | 2024-04-14 15:47:38
赞
踩
六自由度stewart平台的matlab可视化模型
1.坐标系建立
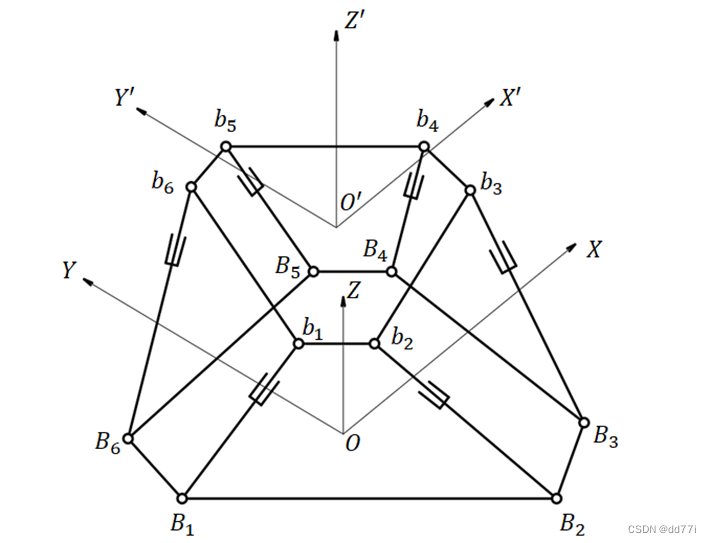
如图1.1所示的结构简图,是Stewart平台的6个下铰接点,
是Stewart平台的6个下铰接点,如图所示建立坐标系。
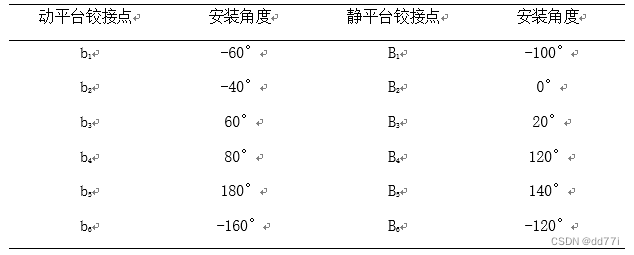
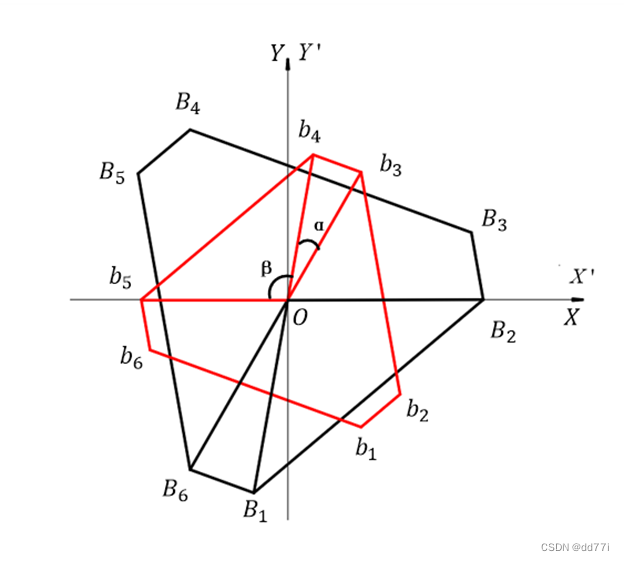
各铰接点的安装角度,在各自坐标系中如图1.2所示,俯视图如图1.3所示。
2.闭环矢量法
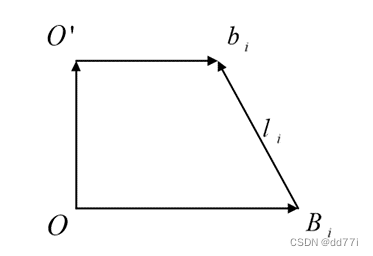
满足以下关系:
![]()
得到6个的值,就是所求运动学逆解。
3.MATLAB可视化模型
见附件

声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小丑西瓜9/article/detail/422870
推荐阅读
相关标签

