
热门标签
热门文章
- 1单机部署ELK_elk单机部署
- 2深入探索实时音视频技术:RTC程序设计权威指南_rtc程序设计:实时音视频权威指南 百度网盘
- 3域组策略开启RDP远程桌面功能_远程(rdp)连接要求使用设定的安全层并启用配置的策略设置如何通过代码实现
- 4装饰器模式
- 5Android 数据存储:Android Jetpack 中的 DataStore_android datastore 数据存储
- 6整理了上百个开源中文大语言模型,涵盖模型、应用、数据集、微调、部署、评测_基于大语言模型的网络自动配置平台的设计与开发
- 7APP-Inventor俄罗斯方块设计与实现毕业作业.rar(含源文件aia,apk文件及毕业论文)_app inventor游戏毕业设计
- 8状态机模式接受命令解析指令(modbus、AT指令)_modbus收发状态机
- 9(避开网上复制操作)最详细的树莓派刷机配置(含IP固定、更改国内源的避坑操作、SSH网络登录、VNC远程桌面登录)
- 10clickhouse深入浅出
当前位置: article > 正文
基于ROS2多机器人编程资料_ros2机器人编程实战 pdf
作者:小丑西瓜9 | 2024-04-20 00:10:39
赞
踩
ros2机器人编程实战 pdf
基于ROS2多机器人编程资料
鱼香ROS介绍:
鱼香ROS是由机器人爱好者共同组成的社区,欢迎一起参与机器人技术交流。
进群加V:fishros2048
文章信息:
标题:基于ROS2多机器人编程资料
原文地址:https://fishros.org.cn/forum/topic/21
关键词:
参与者: 小鱼,
版权声明: 文章中所有知识产权归鱼香ROS及原作者所有。
1. 小鱼笑嘻嘻的说:
基于ROS2多机器人编程资料
- 推荐语:基于ROS2的多机器人
- 地址:https://osrf.github.io/ros2multirobotbook/intro.html
介绍
欢迎!这是一本关于多机器人系统的书。为什么?因为这是未来!
机器人在许多“现实生活”场景中变得更实惠、更有能力和更有用。因此,我们看到越来越多的机器人需要共享空间并协同工作以完成任务。在本书中,我们将介绍机器人操作系统 2 (ROS 2) 以及基于 ROS 2 构建的机器人中间件框架 (RMF),它试图简化复杂多机器人系统的创建和操作。
本章描述了 ROS 2 和 RMF 系统集成多个机器人的动机和目标。
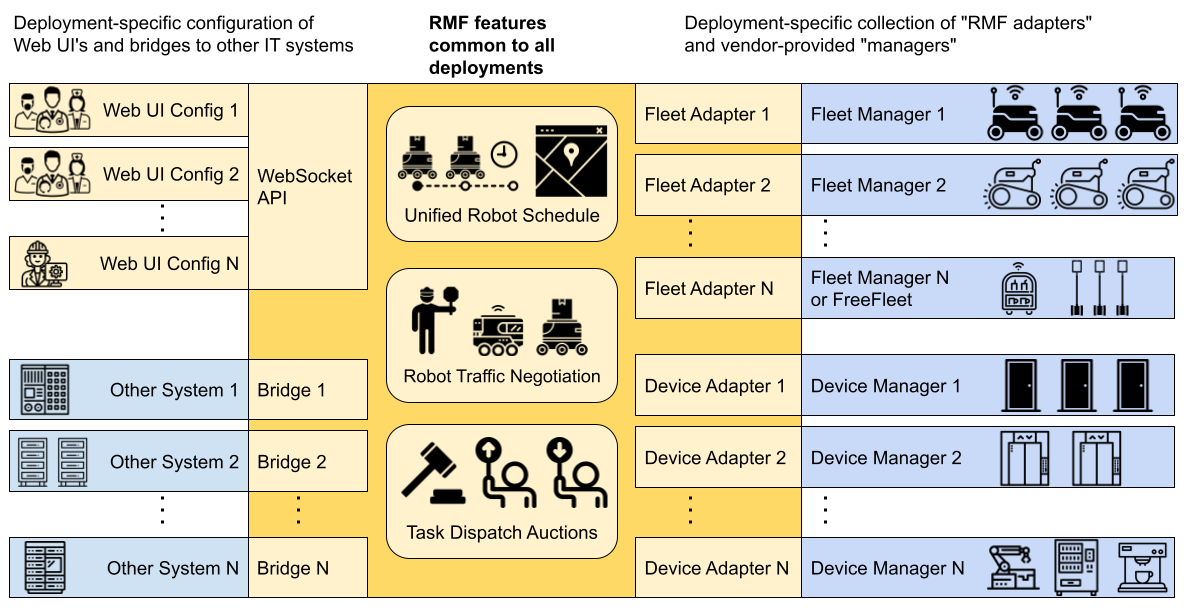
RMF
RMF 是在 ROS 2 之上构建的可重用、可扩展库和工具的集合,可实现任何类型机器人系统的异构车队的互操作性。RMF 将标准化通信协议用于部署机器人的基础设施、环境和自动化,以优化关键资源(即机器人、电梯、门、通道等)的使用。它通过资源分配和通过 RMF 核心防止共享资源的冲突为系统增加了智能,这将在本书后面详细描述。
RMF 足够灵活和强大,几乎可以在任何通信层上运行并与任意数量的 IOT 设备集成。RMF 的体系结构的设计方式允许随着环境中自动化水平的提高而扩展。系统和用户可以通过多种方式通过 API 和可定制的用户界面与 RMF 进行交互。一旦在环境中部署,RMF 将通过允许共享资源和最小化集成来节省成本。这是机器人开发人员和机器人客户一直在寻找的东西。简而言之,这里是 RMF:
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小丑西瓜9/article/detail/454329
推荐阅读
相关标签

