
- 1Linux安装docker(小白向)_sudo mkdir /etc/docker2
- 2编译原理之基础概念_编译原理不学可以吗
- 3基于spacy的句法依存、实体识别、分析_spacy语法分析技术
- 413年测试老鸟,接口性能测试-压测总结汇总,一文概全...
- 52021CCPC东北四省赛 解题报告
- 6基于SpringBoot框架的RBAC权限模型代码实现(demo)(纯接口无后台)_rbac demo
- 755个软件测试工具,正在做测试的你get到了吗
- 8天空盒1-天空盒的实现原理
- 9CDH整合Flink(CDH6.3.0+Flink1.12.1)
- 10JUC并发编程学习(十二)-四大函数式接口_四大函数式接口使用场景
YOLOV3--训练数据+视频检测_yolo 视频 稳定
赞
踩
YOLOV3–训练数据+视频检测
背景
当今,深度学习、人工智能是一个很火的方向。深度学习更是开启了机器视觉的新方向,如果要做物体识别,目标检测,你完全不用根据不同对象而重新设计算法(这是传统机器视觉的做法),它是一个黑箱,只需要制作好数据集,学会调参就可以很快的应用到你的项目中。


为什么是yolov3
关于目标检测,深度学习的算法有很多,有 two stage 的算法,它们的识别精度会相对于one stage 的算法高,但是在识别速率上并没有那么高。典型的one stage (我理解它为单阶段,卷积之后直接推理出结果,two stage则不是直接推理出来):YOLO系列 和SSD。如下图所示。用最简单易懂的话来总结yolo系列算法的关系,特点。
yolov1结构图如下。最终一张图片经过这个算法之后,输出只有一个7* 7 *30的张量,其中每一个grid cell单独拎出来开始一个类似于一条数组,有两个box(每个box用来预测一类目标,每个box有5个元素,分别是预测框的x、y坐标、框、高、置信度(概率)),后面就是这套模型对应的各个目标的得分。因为最终的gridcell代表的是原图像的一块很大的面积,而只有两个box来预测,因而会导致小物体的识别效果不好,甚至识别不出来,所以yolov1很快就被淘汰了。

YOLO v2的改进:
1.对网络每一层做输出做归一化。这样,输出被划分到 [0,1] 闭区间。不需要每层学习数据的分布,收敛速度加快。并且,解放了dropout,使mAP值提升。
预训练阶段v1使用224 * 224的imageNet数据集进行,然后检测阶段换了分辨率为448 * 448;这需要网络对尺寸的变换进行适应,可能会导致变换过程中权值更新不完全,降低检测时的mAP值;v2在224 * 224上预训练,又使用448*448进行适应性训练,最后使用448 * 448进行测试,能够缓解这一问题的发生。前两步均在ImageNet数据集上进行,后一步在自己的数据集上进行。
2.将Darknet-19网络的全连接层和最后一个pooling层去掉,使得最后的卷积层可以有更高分辨率的特征。416 * 416代替原来448 * 448,最终输入变成13 * 13大小的feature map输出。每个grid cell 给定 9 个框,由v1的7 * 7 * 2(30维向量中的前10个特征)变为13 * 13 * 9。这样可以提高定位准确性。
采用k-means的方式对训练集的bounding boxes做聚类,试图找到合适的anchor box,发现仅选取5种box就能达到Faster RCNN的9中box的效果。
每个bounding box预测5个值:x,y,w,h和o。x,y使用sigmoid函数进行归一化到(0,1)之间,这样处理使得模型训练更加稳定;添加一个 passthrough layer 层。即将前面一层的26 * 26的feature map和本层的13 * 13的feature map进行连接,有点像ResNet。经过层层卷积和pooling,小的object可能到最后都不见了,通过连接可以有效检测小的object。进行多尺度训练,在训练时,每训练10个batch,网络就会随机选择{320,352,…,608}中的另一种size的输入。size为32的倍数。这使得该网络可以检测不同尺寸的图像。

yolov3网络模型图如下:

1.它采用了darknet53代替darknet19;
2.生成了1313255,2626255,5252255三个尺度特征图;
3.采用9个尺寸的锚框,分别大、中、小;
4.对预测边框采用了逻辑回归预测;
5.能够检测出小物体;
6.识别速度快;
7.yolov3的每个grid cell有三个box,每个grid cell可以预测3个目标,与之前不同的是,对应元素并不是yolov1中放的预测框的坐标和框高,而是预测框的坐标框高与实际打标时的框的坐标框高之间的偏移量。如下图


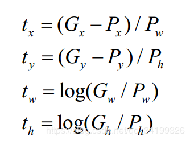
上图公式中tx,ty,tw,th分别是预测框的坐标宽高的偏移量,Gx,Gy,Gw,Gh分别是真实框的坐标宽高,Px,Py,Pw,Ph分别是预测框的坐标宽高,上面的公式中比上Pw,Ph、取对数是因为要相对化处理,可以理解为归一化,因为,预测框有可能是预测大物体,那框就会很大,预测小物体,框就会很小,相对化处理后就会避免这种很极端情况的发生。
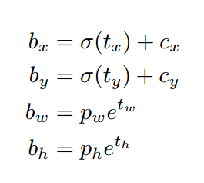
训练模型是就是不断训练逼近期望值,最终得到使上面公式中tx,ty,tw,th的值为零,损失值最小的那套权重。测试时,将box中的参数代入到上式中,就可以实现逻辑回归,大概的意思是偏移量代入到逻辑回归公式,就可以实现对锚框的平移、缩放,使之与真实边界框尽可能重叠。这是他边界回归预测的一个想法。
ubantu16.04环境下
下面说一下步骤:
我试下ubantu16.04下操作的,自己安装一下该系统:
安装完后先按着这个网站操作一下,里面会告诉你关于这个一开怎么用yolov3,按着步骤跑一遍。
这是一个用yolov3来跑雪人识别的,下面是我识别的效果:



经过了上面这个步骤,你应该会对怎么用它有自己一个理解,算是入门吧。
训练自己的数据集
1.下载labalimg这个软件;
2.网上下载图片,关于自己的数据集的收集,新建一个文件夹,存放图片;

3.新建另一个文件夹,存放打标之后的文件设置好保存的路径;
4.开始漫长的打标之旅,图片收集要多一些,越多越好,w:是开始画框的快捷键,d:是下一张照片,a :是上一张照片,空格是:确认照片,记得打标之后保存;

5.在对应的文件夹中建立如下文件夹,其中JPEGlmages放的是你数据集中的照片,labels是放你打标之后的xml文件,Annottations放的是xml文件转换成的txt文件,lmageSets文件夹下新建一个main文件夹。它是一个路径,最终在main文件夹下会生成4个txt文件,指示训练集测试集的路径。

下面这个py文件是将打标后xml文件转换成txt文件,这里需要注意更改相应的文件路径。
import os import sys import xml.etree.ElementTree as ET import glob #将打标之后的xml文件转换成txt文件 def xml_to_txt(indir,outdir): os.chdir(indir) annotations = os.listdir('.') annotations = glob.glob(str(annotations)+'*.xml') for i, file in enumerate(annotations): file_save = file.split('.')[0]+'.txt' file_txt=os.path.join(outdir,file_save) f_w = open(file_txt,'w') # actual parsing in_file = open(file) tree=ET.parse(in_file) root = tree.getroot() for obj in root.iter('object'): current = list() name = obj.find('name').text xmlbox = obj.find('bndbox') xn = xmlbox.find('xmin').text xx = xmlbox.find('xmax').text yn = xmlbox.find('ymin').text yx = xmlbox.find('ymax').text #print xn f_w.write(xn+' '+yn+' '+xx+' '+yx+' '+name+'\n') #f_w.write(str(name.encode("utf-8"))+"\n") indir='/home/zj/mylabal' #xml目录 outdir='/home/zj/darknet2(2019.12.09)/scripts/VOCdevkit/VOC2007/labels' #txt目录 xml_to_txt(indir,outdir)

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
下面的代码是用于分配数据集和测试集的比例的一个py文件。同样需要将路径更改成对应自己的文件路径。
import os import random #用于分配训练集的比例权重,生成main下的各个文件 trainval_percent = 0.5 train_percent = 0.5 xmlfilepath = '/home/ZJ/文档/darknet2_2019_12_09/scripts/VOCdevkit/VOC2007/Annotations' txtsavepath = '/home/ZJ/文档/darknet2_2019_12_09/scripts/VOCdevkit/VOC2007/ImageSets/Main' total_xml = os.listdir(xmlfilepath) num=len(total_xml) list=range(num) tv=int(num*trainval_percent) tr=int(tv*train_percent) trainval= random.sample(list,tv) train=random.sample(trainval,tr) ftrainval = open(txtsavepath+'/trainval.txt', 'w') ftest = open(txtsavepath+'/test.txt', 'w') ftrain = open(txtsavepath+'/train.txt', 'w') fval = open(txtsavepath+'/val.txt', 'w') for i in list: name=total_xml[i][:-4]+'\n' if i in trainval: ftrainval.write(name) if i in train: ftrain.write(name) else: fval.write(name) else: ftest.write(name) ftrainval.close() ftrain.close() fval.close() ftest .close()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
还有更改voc.data文件 ,还有name文件(在data文件夹下)。voc.data 文件存放着指示你训练集测试集的路径。name文件指示着你训练的类别,如果测试时发现标签贴错了,可以更改name文件下名称的顺序。


之后就可以开始训练了,train_yolov3.log是日志文件,用于后面打印损失函数曲线图用。
./darknet detector train cfg/voc.data cfg/yolov3-voc.cfg darknet53.conv.74 | tee visualization/train_yolov3.log ##训练指令
- 1
./darknet detector test cfg/voc.data cfg/yolov3-voc.cfg backup/yolov3-voc_10000.weights data/80.jpg ##测试指令
- 1
开始漫长的训练之后,当训练中日志的avg参数的值小于0.1 即0.0几时可以视为训练可以结束了。在上面的测试指令中,要根据你训练得到的权重文件的路径,更改,以及你测试照片路径也要相应更改。打印loss曲线还有iou图如下,集体怎么打印网上资料很多。


测试如下:(照片是在网上找的。如有侵犯,请联系我。)




视频检测

流程如上面,代码如下,放在python文件夹下。需要将训练后的权重文件路径,视频文件路径,合成视频存放路径改成相应的路径。视频合成时,帧数要要设置好,才可以使合成视频和识别的视频匹配。这里我将识别的类别用不同颜色框起来显示。同时,yolov3处理图片是按rgb的顺序进行,opencv处理图片是bgr的顺序,所以也需要调整顺序,不然识别后的照片会颜色失真。我的处理是在运用opencv处理图片之前将图片的通道调整为bgr的顺序。
#coding=UTF-8 from ctypes import * import math import random #import module named cv2 to draw import cv2 import Image def sample(probs): s = sum(probs) probs = [a/s for a in probs] r = random.uniform(0, 1) for i in range(len(probs)): r = r - probs[i] if r <= 0: return i return len(probs)-1 def c_array(ctype, values): arr = (ctype*len(values))() arr[:] = values return arr class BOX(Structure): _fields_ = [("x", c_float), ("y", c_float), ("w", c_float), ("h", c_float)] class DETECTION(Structure): _fields_ = [("bbox", BOX), ("classes", c_int), ("prob", POINTER(c_float)), ("mask", POINTER(c_float)), ("objectness", c_float), ("sort_class", c_int)] class IMAGE(Structure): _fields_ = [("w", c_int), ("h", c_int), ("c", c_int), ("data", POINTER(c_float))] class METADATA(Structure): _fields_ = [("classes", c_int), ("names", POINTER(c_char_p))] #lib = CDLL("/home/pjreddie/documents/darknet/libdarknet.so", RTLD_GLOBAL) lib = CDLL("/home/ZJ/文档/darknet2_2019_12_09/libdarknet.so", RTLD_GLOBAL) lib.network_width.argtypes = [c_void_p] lib.network_width.restype = c_int lib.network_height.argtypes = [c_void_p] lib.network_height.restype = c_int predict = lib.network_predict predict.argtypes = [c_void_p, POINTER(c_float)] predict.restype = POINTER(c_float) set_gpu = lib.cuda_set_device set_gpu.argtypes = [c_int] make_image = lib.make_image make_image.argtypes = [c_int, c_int, c_int] make_image.restype = IMAGE get_network_boxes = lib.get_network_boxes get_network_boxes.argtypes = [c_void_p, c_int, c_int, c_float, c_float, POINTER(c_int), c_int, POINTER(c_int)] get_network_boxes.restype = POINTER(DETECTION) make_network_boxes = lib.make_network_boxes make_network_boxes.argtypes = [c_void_p] make_network_boxes.restype = POINTER(DETECTION) free_detections = lib.free_detections free_detections.argtypes = [POINTER(DETECTION), c_int] free_ptrs = lib.free_ptrs free_ptrs.argtypes = [POINTER(c_void_p), c_int] network_predict = lib.network_predict network_predict.argtypes = [c_void_p, POINTER(c_float)] reset_rnn = lib.reset_rnn reset_rnn.argtypes = [c_void_p] load_net = lib.load_network load_net.argtypes = [c_char_p, c_char_p, c_int] load_net.restype = c_void_p do_nms_obj = lib.do_nms_obj do_nms_obj.argtypes = [POINTER(DETECTION), c_int, c_int, c_float] do_nms_sort = lib.do_nms_sort do_nms_sort.argtypes = [POINTER(DETECTION), c_int, c_int, c_float] free_image = lib.free_image free_image.argtypes = [IMAGE] letterbox_image = lib.letterbox_image letterbox_image.argtypes = [IMAGE, c_int, c_int] letterbox_image.restype = IMAGE load_meta = lib.get_metadata lib.get_metadata.argtypes = [c_char_p] lib.get_metadata.restype = METADATA load_image = lib.load_image_color load_image.argtypes = [c_char_p, c_int, c_int] load_image.restype = IMAGE rgbgr_image = lib.rgbgr_image rgbgr_image.argtypes = [IMAGE] predict_image = lib.network_predict_image predict_image.argtypes = [c_void_p, IMAGE] predict_image.restype = POINTER(c_float) def classify(net, meta, im): out = predict_image(net, im) res = [] for i in range(meta.classes): res.append((meta.names[i], out[i])) res = sorted(res, key=lambda x: -x[1]) return res #检测 第三个参数image是照片的路径 def detect(net, meta, image, thresh=.5, hier_thresh=.5, nms=.45): im = load_image(image, 0, 0) #加载图片得到im对象 num = c_int(0) pnum = pointer(num) predict_image(net, im) dets = get_network_boxes(net, im.w, im.h, thresh, hier_thresh, None, 0, pnum) num = pnum[0] if (nms): do_nms_obj(dets, num, meta.classes, nms); res = [] for j in range(num): for i in range(meta.classes): if dets[j].prob[i] > 0: b = dets[j].bbox res.append((meta.names[i], dets[j].prob[i], (b.x, b.y, b.w, b.h))) res = sorted(res, key=lambda x: -x[1]) free_image(im) free_detections(dets, num) return res # 2018.04.25 用于绘制物体框 def showPicResult(image): img = cv2.imread(image) img3=img[...,::-1] cv2.imwrite(out_img, img3) for i in range(len(r)): x1=r[i][2][0]-r[i][2][2]/2 y1=r[i][2][1]-r[i][2][3]/2 x2=r[i][2][0]+r[i][2][2]/2 y2=r[i][2][1]+r[i][2][3]/2 im = cv2.imread(out_img) #draw different color rectangl #random color #r_color = random.randint(0,255)#随机赋值 #g = random.randint(0,255) #b = random.randint(0,255) #cv2.rectangle(im,(int(x1),int(y1)),(int(x2),int(y2)),(r_color,g,b),2)#画框 if r[i][0] =="person": cv2.rectangle(im,(int(x1),int(y1)),(int(x2),int(y2)),(0,0,255),3) R=255 g=0 b=0 if r[i][0] =="motor": cv2.rectangle(im,(int(x1),int(y1)),(int(x2),int(y2)),(0,255,0),3) R=0 g=255 b=0 if r[i][0] =="car": cv2.rectangle(im,(int(x1),int(y1)),(int(x2),int(y2)),(255,0,0),3) R=0 g=0 b=255 #cv2.rectangle(im,(int(x1),int(y1)),(int(x2),int(y2)),(255,0,0),3) #putText 贴标 x3 = int(x1+5) y3 = int(y1-10) x4 = int(x1) y4 = int() font = cv2.FONT_HERSHEY_SIMPLEX if ((x3<=im.shape[0]) and (y3>=0)): im2 = cv2.putText(im, str(r[i][0])+":"+str(round((r[i][1]*100),2))+"%", (x3,y3), font, 0.8, (b,g,R) , 2) else: im2 = cv2.putText(im, str(r[i][0])+":"+str(round((r[i][1]*100),2))+"%", (int(x1),int(y1+6)), font, 0.8, (b,g,R) , 2) #This is a method that works well. #img2=im[...,::-1] cv2.imwrite(out_img, im) #img2=img[...,::-1] #cv2.imwrite(out_img, img2) #img4 = cv2.imread(out_img) #img5 = img4[...,::-1] cv2.imshow('yolo_image_detector',cv2.imread(out_img)) if __name__ == "__main__": net = load_net("/home/ZJ/文档/darknet2_2019_12_09/cfg/yolov3-voc.cfg", "/home/ZJ/文档/darknet2_2019_12_09/backup/yolov3-voc_10000.weights", 0) meta = load_meta("/home/ZJ/文档/darknet2_2019_12_09/cfg/voc.data")#加载路径 out_img = "/home/ZJ/文档/darknet2_2019_12_09/video/test_result.jpg" video_tmp = "/home/ZJ/文档/darknet2_2019_12_09/video/video_tmp.jpg"#加载路径,导入对象 origin_video = '/home/ZJ/文档/darknet2_2019_12_09/video/123.mp4'#读取本地视频 # make a video_object and init the video object cap = cv2.VideoCapture(origin_video) # define picture to_down' coefficient of ratio scaling_factor = 0.5#0.5 count = 0 img = cv2.imread(video_tmp) imgInfo = img.shape p_num = 0 size = (imgInfo[1],imgInfo[0]) #获取图片宽高度信息 fourcc= cv2.cv.FOURCC(*'XVID')#使用XVID编码器 videoWrite = cv2.VideoWriter('/home/ZJ/文档/darknet2_2019_12_09/video/final_out_video.avi',fourcc,29,size)# 根据图片的大小,创建写入对象 (文件名,支持的编码器,5帧,视频大小(图片大小))# loop until press 'esc' or 'q' while (cap.isOpened()): # collect current frame ret, frame = cap.read() if ret == True: count = count + 1 #print count else: break #detect and show per 50 frames #照片抽帧成图片 if count == 1: count = 0 # resize the frame frame = cv2.resize(frame,None,fx=scaling_factor,fy=scaling_factor,interpolation=cv2.INTER_AREA) img_arr = Image.fromarray(frame) img_goal = img_arr.save(video_tmp) r = detect(net, meta,video_tmp)#检测,将结果赋值给r r是list类型 #print r for j in range(len(r)): print "检测结果:",r[j][0], "概率",' : ', round((100*r[j][1]),2),"%" print r[j][2] print '' print '#*********************************#' #display the rectangle of the objects in window showPicResult(video_tmp) p_num = p_num+1 fileName = "/home/ZJ/文档/darknet2_2019_12_09/video/test_result.jpg" #循环读取所有的图片 ig = cv2.imread(fileName) #b,g,r=cv2.split(ig) #img2=cv2.merge([r.g.b]) #img2=ig[...,::-1] videoWrite.write(ig)# 将图片写入所创建的视频对象 #print ig else: continue # wait 1ms per iteration; press Esc to jump out the loop c = cv2.waitKey(1) if (c==27) or (0xFF == ord('q')): break # release and close the display_window print "共检测照片数量:",p_num cap.release()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
不允许上传太大的图片动图,所以,我测试了一段小视频,最终效果如下:

写在最后
做数据集的时候样本尽量大,1万张照片以上比较好,我只做了快4百张照片的一个数据集,所以有些元素并很好地没有识别出来。
本人也是刚接触目标检测,文笔有限,欢迎批评指正~
下一篇,应该是《细谈Resnet残差网络》~

