
热门标签
热门文章
- 1Hbase实际使用场景以及相关可视化工具_hbase可视化工具
- 2异常检测-概述_异常检测的基本原理及作用
- 3基于STM32的动态天气时钟毕业设计_基于stm32+esp8266的桌面型网络天气时钟系统设计
- 4基于springboot餐厅点餐系统_springboot 点餐系统
- 52024年数据仓库解决方案——ODPS组件化改造之路,2024年最新大数据开发源码的Binder权限是如何控制
- 6一文看懂大数据生态圈完整知识体系【大数据技术及架构图解实战派】_互联网和大数据知识体系图
- 7大牛的十多年技术人生的经验与心得_机械的技术大牛在小公司合适吗
- 8IDEA 提交代码到gitee上面_idea push 到gitee的代码在哪里看
- 9论文导读|DynGCN:基于时空建模的动态图卷积网络_dynamic graph convolutional
- 10python判断素数的函数_python判断是否为素数
当前位置: article > 正文
【Autoware】三、ROSBAG生成waypoint_roswaypoint
作者:小丑西瓜9 | 2024-04-28 02:51:21
赞
踩
roswaypoint
1.启动Autoware
cd ~/autoware.ai/
source install/setup.bash
roslaunch runtime_manager runtime_manager.launch
- 1
- 2
- 3
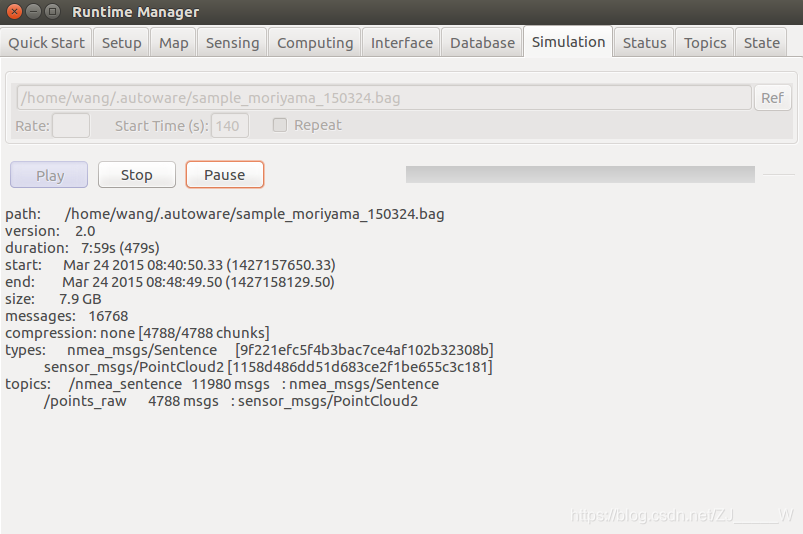
2.切换到Simulation模块
- 点击右侧的Ref,选择文件:
/.autoware/sample_moriyama_150324.bag - 点击Play按钮以后,立马点击Pause按钮
3.加载地图数据
- 步骤和这个博客完全一样,加载地图数据
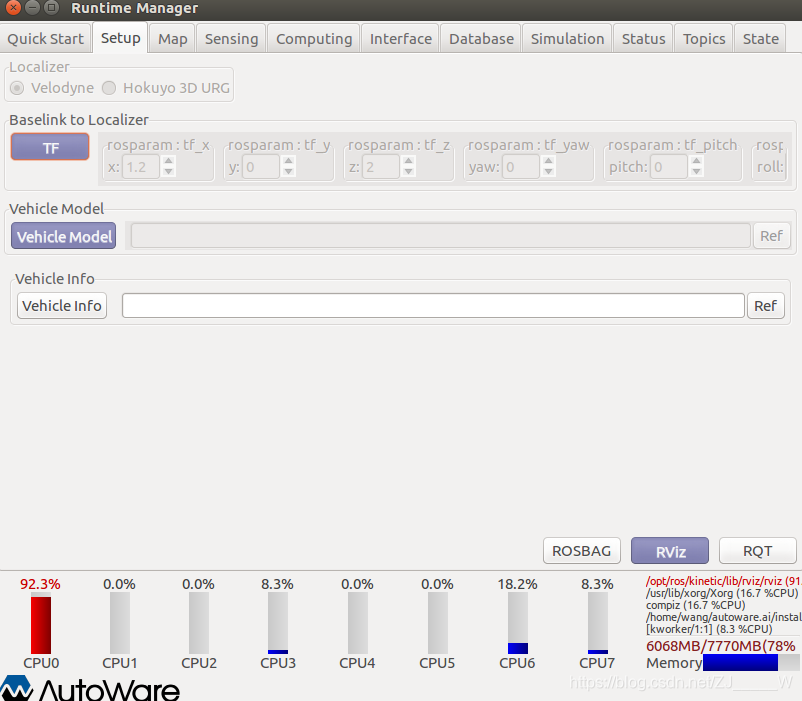
4.切换到Setup模块
- 依次点击TF和Vehicle Model
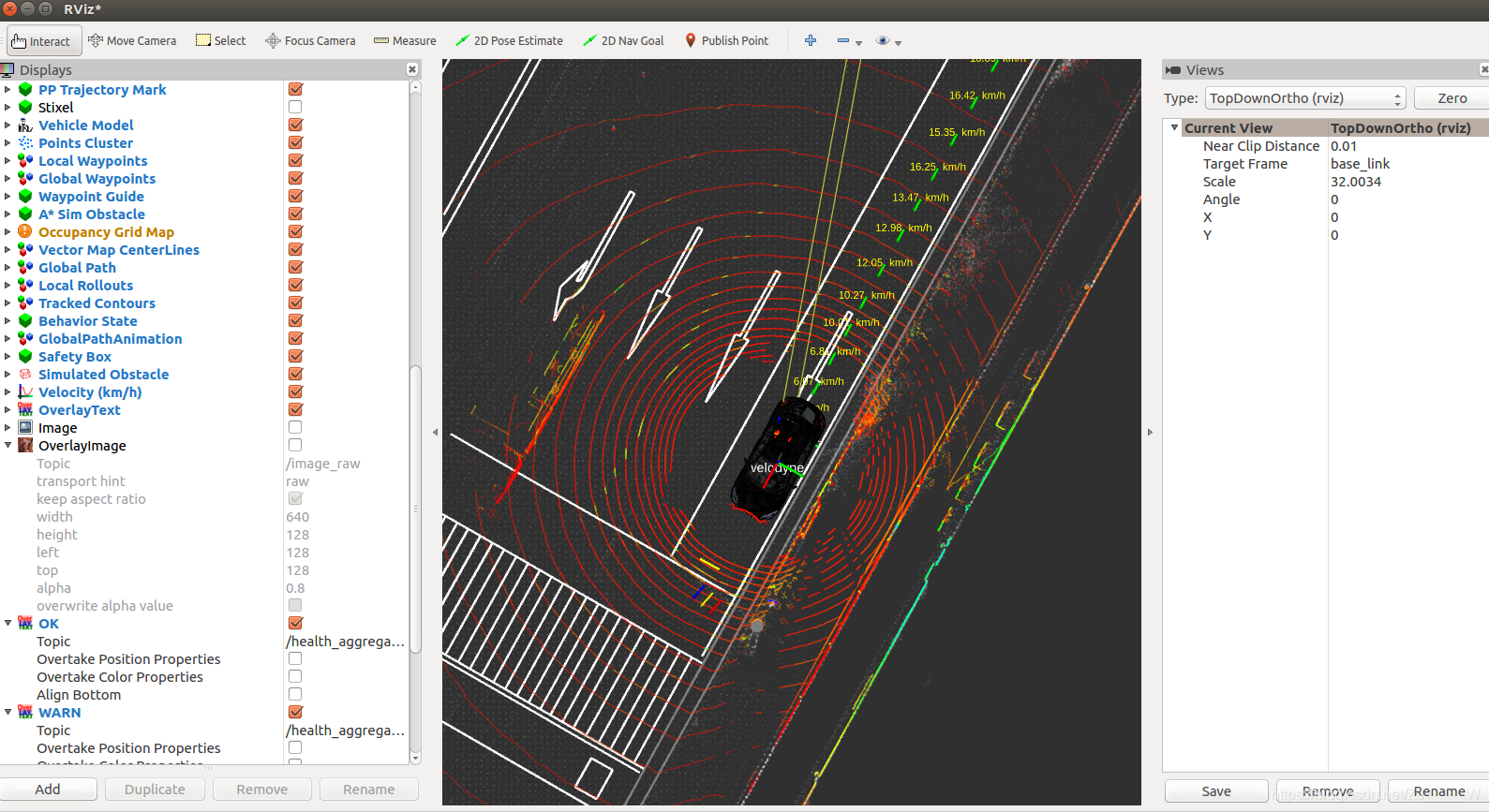
- 启动右下方RViz可视化工具
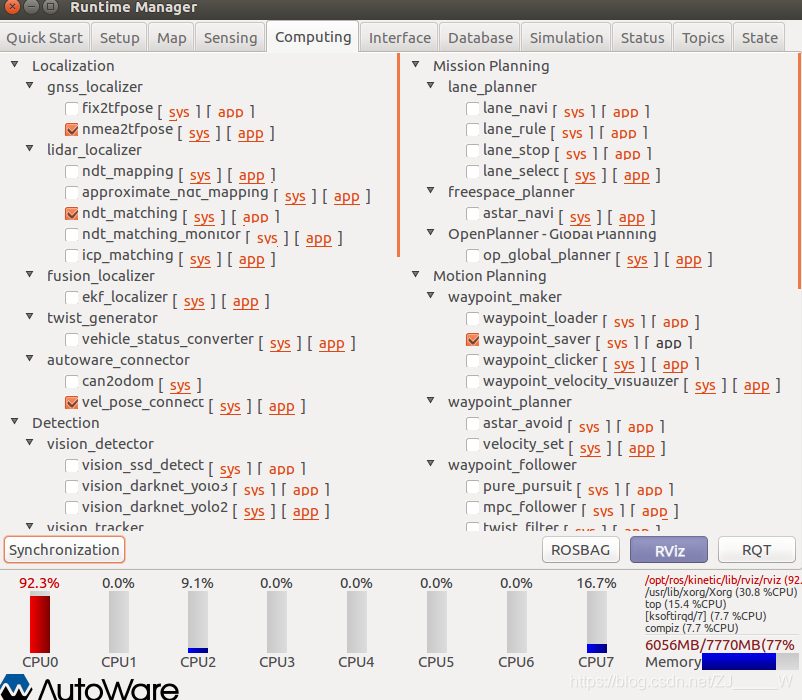
5.切换到Computing模块
- 勾选下图所示:
点击waypoint_saver后面的App点击Ref选择保存路径
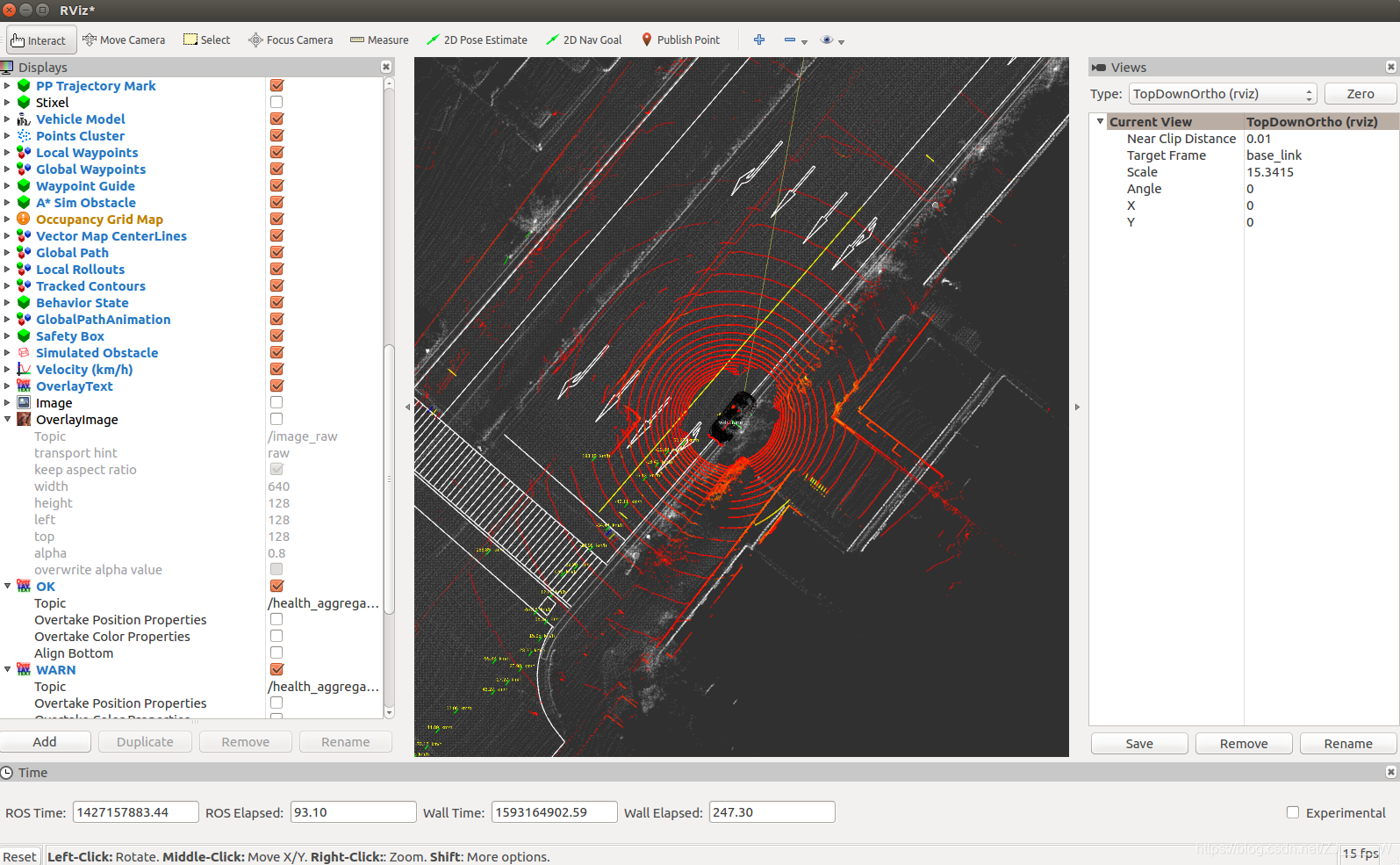
6.返回Simuation模块
- 点击Pause继续播放,效果如下:
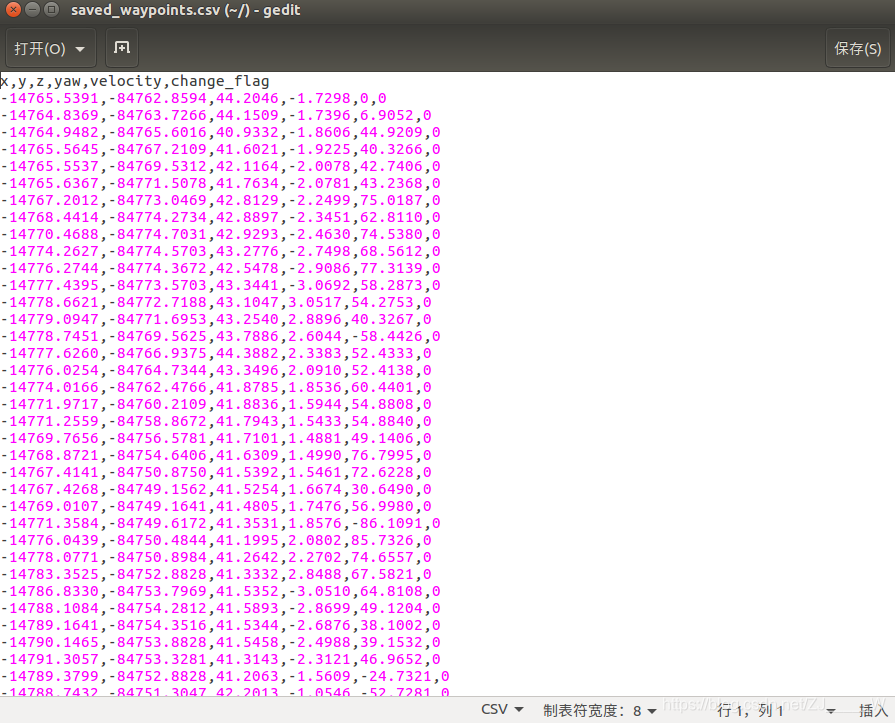
7.查看生成文件
找到自己的保存路径,生成一个waypoint文件
声明:本文内容由网友自发贡献,转载请注明出处:【wpsshop博客】
推荐阅读
相关标签

