
树莓派-Raspberry Pi Pico RP2040 使用大全(硬件接口功能、传感器模块等)_树莓派rp2040
赞
踩
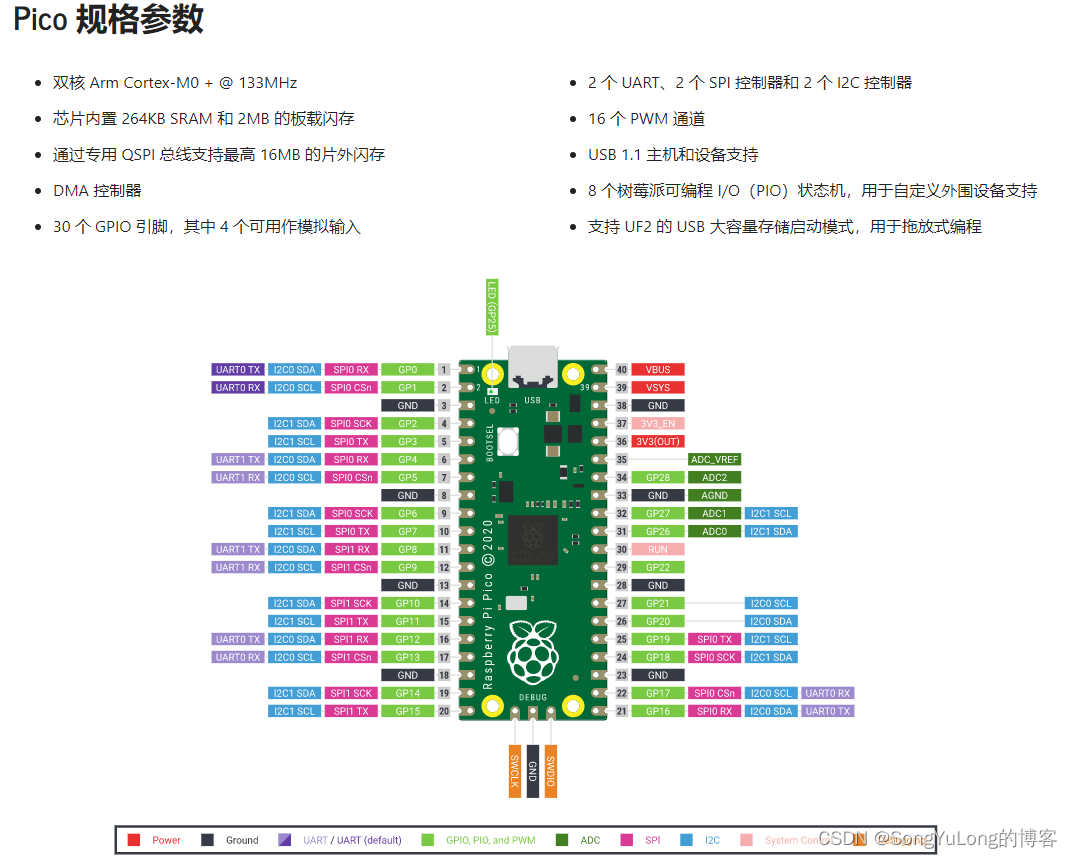
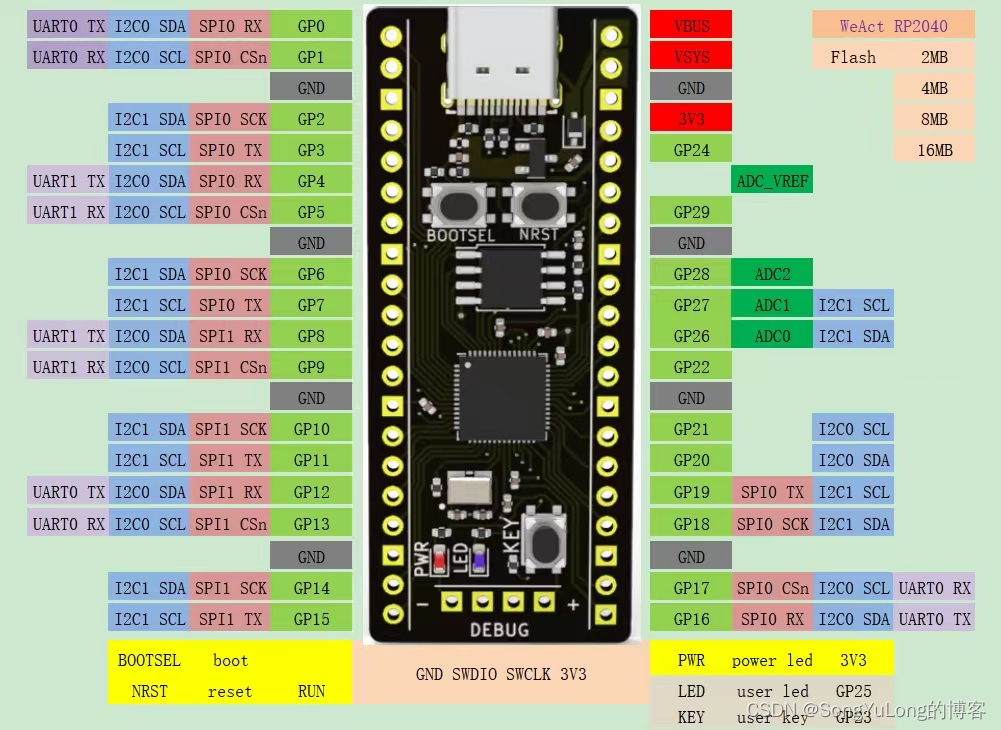
主板
主板实物图

主板引脚图
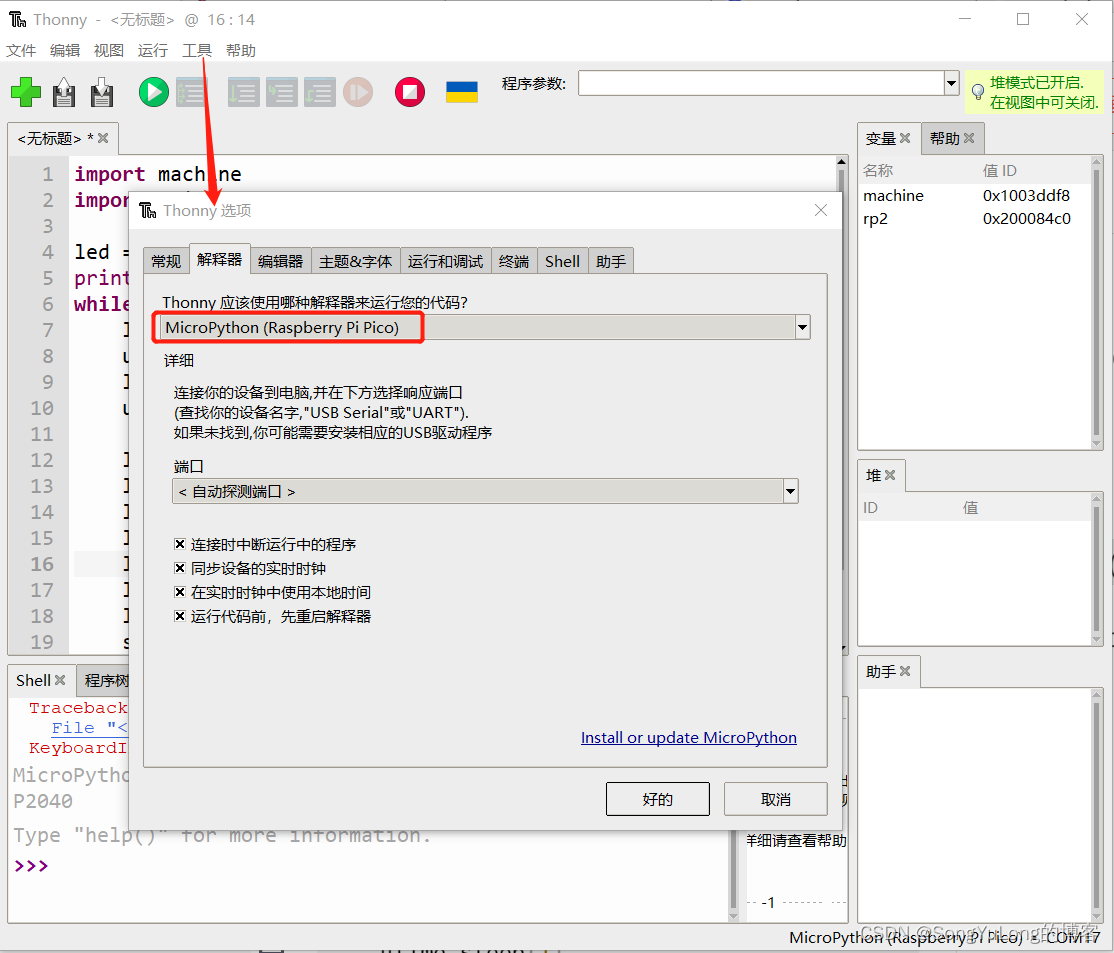
Thonny开发IDE工具
配置解释器:Raspberry Pi Pico
工具=》选项=》解释器(选择Raspberry Pi Pico)
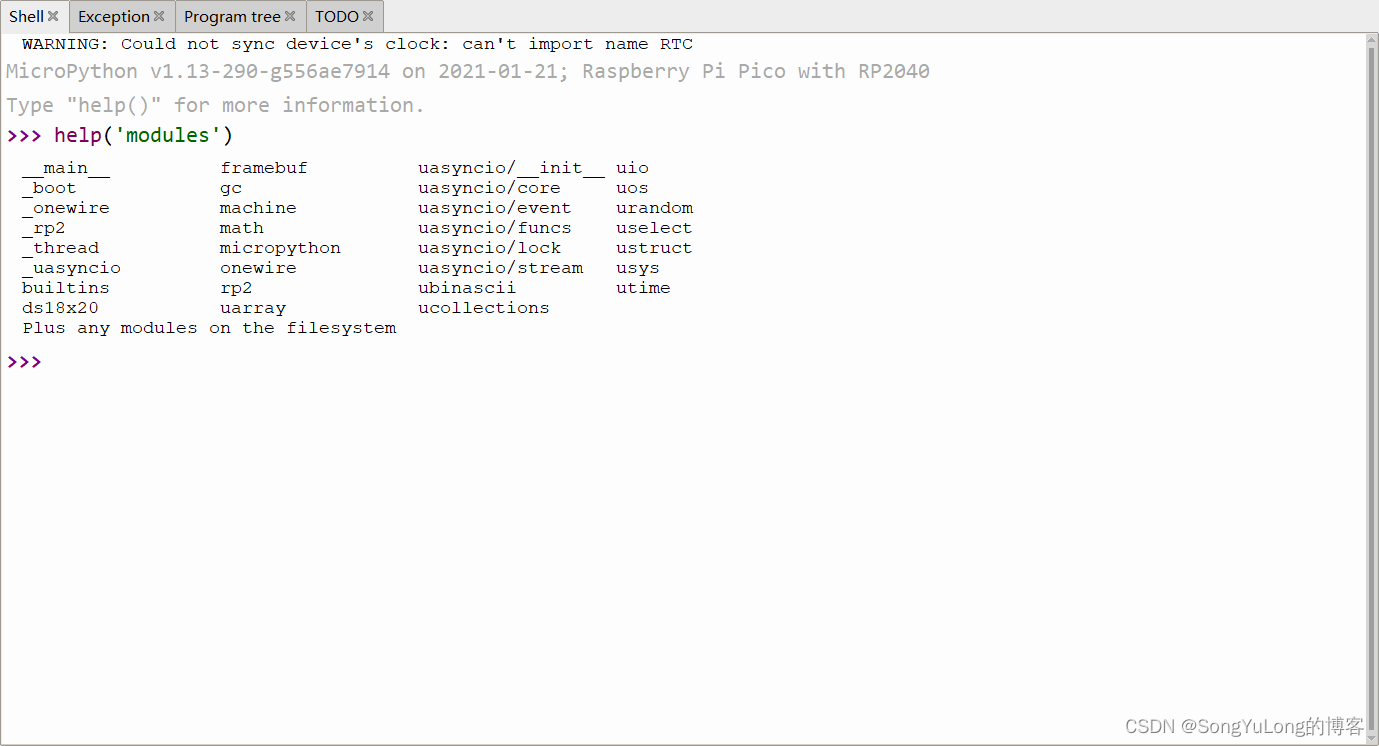
查看帮助信息
help(‘modules’) :查看可以通过import导入的模名
help(模块名):查看指定模块下的类、函数、常量:
help(模块名.类):查看指定模块类包含的函数和常量
Micropython官网文档
CPU主频
- RP2040主频最高支持133MHz
import machine
print(machine.freq()) # 打印当前CPU频率
machine.freq(24000000) # 设置CPU频率
- 1
- 2
- 3
- 4
GPIO 输出
GPIO输出模式:machine.Pin.OUT
GPIO输入模式:machine.Pin.IN
import machine import utime led = machine.Pin(25, machine.Pin.OUT) print('gpio output demo...') while True: led.value(0) utime.sleep(1) led.value(1) utime.sleep(0.5) # 其它GPIO相关操作接口 #led.low() #led.high() #led.toggle() #led.on() #led.off() #led.value(0) #led.value(1) #state=led.value() #print(state)

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
GPIO 输入
上拉:machine.Pin.PULL_UP
下拉:machine.Pin.PULL_DOWN
import machine
import utime
key = machine.Pin(23, machine.Pin.IN, machine.Pin.PULL_UP)
led = machine.Pin(25, machine.Pin.OUT)
print('gpio input demo...')
while True:
if key.value() == 1:
led.value(1)
else:
led.value(0)
utime.sleep_ms(100)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
GPIO 中断
irq(trigger, handler), trigger中断触发方式,handler中断处理函数
下降沿:trigger=machine.Pin.IRQ_FALLING
上升沿:trigger=machine.Pin.IRQ_RISING
import machine import utime key = machine.Pin(23, machine.Pin.IN, machine.Pin.PULL_DOWN) led = machine.Pin(25, machine.Pin.OUT) print('gpio irq demo...') def irq_handler(pin): print(pin) led.toggle() key.irq(trigger=machine.Pin.IRQ_FALLING, handler=irq_handler) while True: utime.sleep(1) print("main loop...")
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
ADC(模数转换)
外部ADC模拟电压表
import machine import utime import math adc0 = machine.ADC(26) adc1 = machine.ADC(27) adc2 = machine.ADC(28) adcvalue0 = 0 adcvalue1 = 0 adcvalue2 = 0 factor = 3.3/(65536) while True: adcvalue0 = adc0.read_u16()*factor adcvalue1 = adc1.read_u16()*factor adcvalue2 = adc2.read_u16()*factor print(adcvalue0, adcvalue1, adcvalue2) utime.sleep_ms(500)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
内部ADC测量温度
import machine
import utime
sensor_temp = machine.ADC(4)
#sensor_temp = machine.ADC(machine.ADC.CORE_TEMP)
conversion_factor = 3.3/(65535)
while True:
reading = sensor_temp.read_u16()*conversion_factor
temperature = 27 - (reading - 0.706)/0.001721
print(temperature,"C")
utime.sleep(1)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
PWM(脉宽调制)
PWM相关接口:
pwm0 = machine.PWM(machine.Pin(0))
pwm0.freq() # 返回当前PWM设置频率
pwm0.freq(2000) # 设置PWM频率
pwm0.duty_u16(15000) # 设置占空比(0~65535)
pwm0.duty_ns(10) # 设置占空比时间ns
import machine import utime import urandom led_r = machine.PWM(machine.Pin(4)) led_g = machine.PWM(machine.Pin(3)) led_b = machine.PWM(machine.Pin(2)) led_r.freq(1000) led_g.freq(1000) led_b.freq(1000) print(led_r.freq()) print(led_g.freq()) print(led_b.freq()) while True: led_r.duty_u16(urandom.randrange(1, 65535, 10)) led_g.duty_u16(urandom.randrange(1, 65535, 20)) led_b.duty_u16(urandom.randrange(1, 65535, 30)) utime.sleep_ms(100)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
WDT看门狗
import machine
import utime
# enable the WDT with a timeout of 5s (1s is the minimum)
wdt = machine.WDT(timeout=5000)
print("WDT Demo...")
while True:
wdt.feed()
utime.sleep(3)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
RTC实时时钟
rtc = machine.RTC()
rtc.datetime()返回一个元组数据:
(年,月,日,星期,时,分,秒,0)
(2022, 10, 14, 4, 14, 41, 57, 0)
import machine
import utime
rtc = machine.RTC()
# 设置RTC日期时间等参数
# rtc.datetime((2020, 1, 21, 2, 10, 32, 36, 0))
while True:
print(rtc.datetime())
utime.sleep(1)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
I2C总线接口
I2C总线的通讯频率:
- 标准模式(Standard):100kbps
- 快速模式(Fast):400kbps
- 快速模式+(Fast-Plus):1Mbps
- 高速模式(High-speed):3.4Mbps
- 超快模式(Ultra-Fast):5Mbps(单向传输)
构造函数
- machine.I2C(id, *, scl, sda, freq=400000)
使用以下参数构造并返回一个新的 I2C 对象:
id:标识特定的 I2C 外设。允许的值取决于特定的端口/板
scl:应该是一个 pin 对象,指定用于 SCL 的 pin。
sda:应该是一个 pin 对象,指定用于 SDA 的 pin。
freq:应该是一个整数,用于设置 SCL 的最大频率。
一般方法
- i2c.scan(): 扫描所有 0x08 和 0x77 之间的 I2C 地址,然后返回一个有响应地址的列表
标准总线操作
-
i2c.readfrom(addr, nbytes, stop=True):
- 功能:从addr指定的从站读取nbytes
- addr:从设备地址
- nbytes:指定读取的字节数
- stop:True传输结束时发送停止信号
- 返回读取数据的对象
- buf = i2c.readfrom(0x44, 5)
-
i2c.readfrom_into(addr, buf, stop=True):
- 功能:从addr指定的从设备读入buf长度的数据到buf内
- addr:从设备地址
- stop:True传输结束时发送停止信号
- 返回: None
- buf = bytearray(3)
i2c.readfrom_into(0x44, buf)
-
i2c.writeto(addr, buf, stop=True):
- 功能:将buf 中的字节写入addr指定的从设备。
- addr:从设备I2C地址
- buf:要写入的字节数组,存放写入的数据,写入的长度为buf的长度。
- stop:True传输结束时发送停止信号
- 返回接收到的ACK数
- 示例:
buf=bytearray([0x01,0x02,0x03])
i2c.writeto(0x74, buf) # 向从设备地址为0x74设备写入3个字节数据
-
i2c.writevto(addr, vector,stop:True):新增更高效的大量数据写入操作。(设备地址 + 命令 + 数据)
- 功能:将vector 中包含的字节写入addr指定的从站
- addr:设备地址
- vector:vector应该是具有缓冲协议的元组或对象列表
- stop:True传输结束时发送停止信号
- 返回接收到的 ACK 数
- 示例:
write_list = [b"\x40", None] # b"\x40" : 命名
write_list[1] = bytearray([0x01,0x05,0x06,0x08]) # 数据
ret = i2c.writevto(0x44, write_list)
print(ret) # 写入字节数 5 个
内存操作
-
i2c.readfrom_mem(addr, memaddr, nbytes, *, addrsize=8):
- 功能:从addr指定的从设备的memaddr指定的内存地址开始,读取nbytes。
- addr:从设备地址
- memaddr:寄存器地址
- nbytes:读取字节数
- addrsize:寄存器地址长度
- 返回读取数据的对象
- buf = i2c.readfrom_mem(0x44, 0x3244, 5, addrsize=16)
-
i2c.readfrom_mem_into(addr, memaddr, buf, *, addrsize=8):
- 功能:从addr指定的从设备的memaddr内存地址开始读入buf长度的数据到buf。
- addr:从设备地址
- memaddr:寄存器地址
- buf:存放读取数据的字节数组
- addrsize:寄存器长度
- 返回None
- buf = bytearray(10)
i2c.readfrom_mem_into(0x44, 0x33, buf, addrsize=8)
-
i2c.writeto_mem(addr, memaddr, buf, *, addrsize=8):
- 功能:将buf中的数据写入到addr从设备的 memaddr开始的寄存器地址中。
- addr:从设备地址
- memaddr:寄存器地址
- buf:写入的数据字节数组
- addrsize:寄存器地址长度,8:单字节,16:双字节
- 示例:
buf = bytearray([0x01,0x02,0x03])
i2c.writeto_mem(0x44, 0xCC66, buf, addrsize=16)
最原始的通信方式:
def write_data(self, buf):
self.temp[0] = self.addr << 1
self.temp[1] = 0x40
self.i2c.start()
self.i2c.write(self.temp)
self.i2c.write(buf)
self.i2c.stop()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
搜索I2C总线设备:
from machine import Pin, I2C
import utime
i2c = I2C(0, sda=Pin(0), scl=Pin(1), freq=400000)
devlist = i2c.scan()
print(devlist)
for dev in devlist:
print(hex(dev))
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
读写I2C设备示例:
import machine import utime sda = machine.Pin(16) scl = machine.Pin(17) i2c = machine.I2C(0, sda=sda, scl=scl, freq=200000) print(i2c.scan()) i2c.writeto(35, '0x01') # power on i2c.writeto(35, '0x10') # H-resolution mode i2c.writeto(35, '0x20') utime.sleep(0.2) while True: i2c.writeto(35, '\x01') val = i2c.readfrom(35, 2, True) print(val) utime.sleep(1)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
UART串口通信
串口通信相关接口:
rxbuf=bytes()
rxData=bytes()
txData=bytes()
tx = machine.Pin(16)
rx = machine.Pin(17)
uart = machine.UART(0, baudrate=9600, bits=8, parity=None, stop=1, tx=tx, rx=rx)
uart.any() # True:有可以读取的数据,False:没有可读取的数据
rxData += uart.read(1) # 读取一个字节数据
rxData = uart.readline() # 读取一行数据
uart.readinto(rxbuf, 10) # 读取10个字节数据到rxbuf
uart.sendbreak() # 中断串口数据发送
txData = b’hello world!’
uart.write(txData) # 串口写入数据
uart.txdone() # 串口数据 True:发送完成, False:还有数据未发送成功
uart.flush() # 串口刷新数据
uart.deinit() # 串口反初始化
uart.CTS
uart.RTS
uart.INV_RX
uart.INV_TX
from machine import Pin,UART import utime uart0 = UART(0, baudrate=9600, bits=8, parity=None, stop=1, tx=Pin(16), rx=Pin(17), ) #uart0.deinit() txData = b'hello world\n\r' rxData = bytes() uart0.write(txData) #buf=bytes() #uart0.readinto(buf, 10) #uart0.sendbreak() print(type(txData)) print(type(rxData)) while True: while uart0.any() > 0: #rxData += uart0.read(1) rxData = uart0.readline() print(rxData.decode('utf-8')) if not uart0.txdone(): uart0.flush() uart0.write(rxData) utime.sleep(0.2)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
Timer定时器
初始化并启动定时器:
- Timer.init(*, mode=Timer.PERIODIC, period=- 1, callback=None)
mode: 定时器模式(Timer.ONE_SHOT , Timer.PERIODIC)
period:定时器周期
callback:定时器回调函数 - Timer.deinit()
启动一个定时器:
from machine import Pin, Timer
led = Pin(25, Pin.OUT)
tim = Timer()
def tick(timer):
global led
led.toggle()
tim.init(freq=2.5, mode=Timer.PERIODIC, callback=tick)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
启动多个定时器:
import utime from machine import Timer def tim_callback1(timer): """ Timer Callback Function. """ print("Timer 1...") pass def tim_callback2(timer): print("Timer 2...") pass tim1 = Timer() tim1.init(mode=Timer.PERIODIC, period=1000, callback=tim_callback1) #tim.init(mode=Timer.ONE_SHOT, period=100, callback=tim_callback) tim2 = Timer() tim2.init(mode=Timer.PERIODIC, period=2000, callback=tim_callback2) print("timer demo ...") #tim1.deinit() #tim2.deinit() while True: utime.sleep(1)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
双核多线程
RP2040 CPU是双核默认代码运行在core0通过
_thread.start_new_thread启动的线程代码运行在core1上,注:start_new_thread只能调用一次,多次调用会提示core 1已使用;
import time, _thread
def th1_task(n, delay):
while True:
print("thread 1 running...",n)
time.sleep(delay)
pass
_thread.start_new_thread(th1_task,(10, 1))
print("thread demo...")
while True:
print("main loop...")
time.sleep(10)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
使用线程互斥锁:
import utime import _thread # 线程互斥锁 lock = _thread.allocate_lock() # 内核1 运行任务 def core1_task(): """ Core1 task """ while True: #lock.acquire() print("core1 task") utime.sleep(0.5) #lock.release() pass _thread.start_new_thread(core1_task, ()) while True: #lock.acquire() print("core0 task") utime.sleep(0.5) #lock.release()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
文件操作
file = open("test.txt", "w")
file.write("Hello, File!")
file.write(str('13245')+"\n")
file.flush()
file.close()
file = open("test.txt")
print(file.read())
file.close()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
模块
超声波测距模块
import machine import utime trig = machine.Pin(16, machine.Pin.OUT) echo = machine.Pin(17, machine.Pin.IN) def get_distance(trig, echo): # 10us high trig.low() utime.sleep_us(2) trig.high() utime.sleep_us(10) trig.low() while (echo.value() == 0): start = utime.ticks_us() while echo.value() == 1: end = utime.ticks_us() d = (end - start) * 0.034 / 2 return d trig.low() while True: distance = get_distance(trig, echo) print("距离:{:.2f} cm".format(distance)) utime.sleep(0.1)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
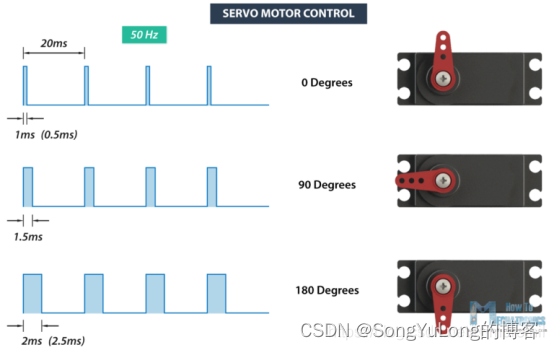
舵机控制
棕色:GND(电源负极)
红色:VCC(电源正极)
橙色:PWM(控制信号)

控制时序0~180角度
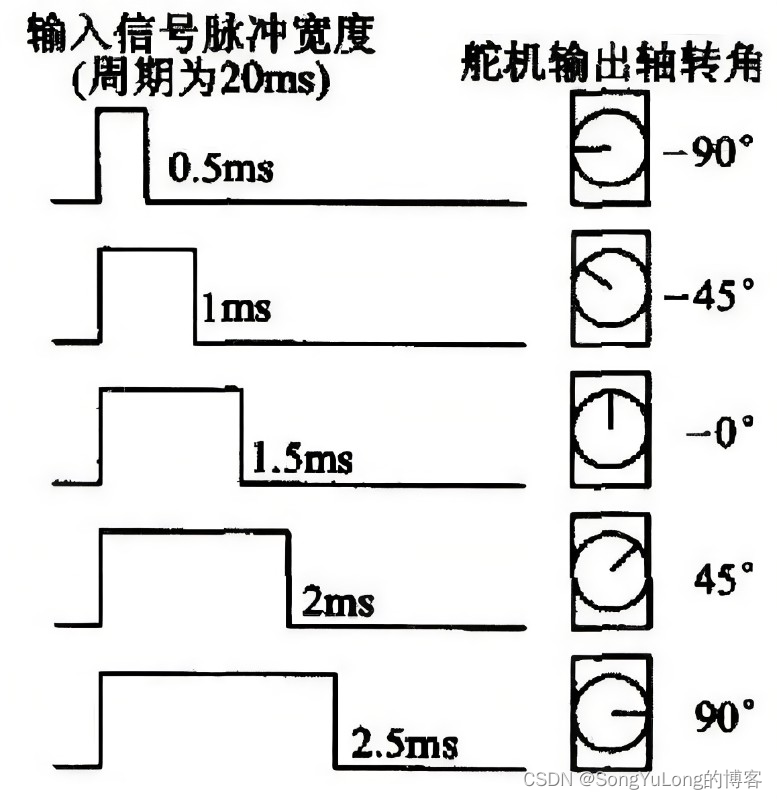
控制时序-90 ~ 0 ~ 90角度
from machine import Pin, PWM import utime pwm0 = PWM(Pin(0)) pwm0.freq(50) updown = True # 舵机控制信号周期T=20ms, f=1/T = 1/20ms = 50Hz # 脉冲宽度:0.5ms ---> 0度 PWM_DUTY=65535*(0.5ms/20ms)=1638 # 脉冲宽度:1.5ms ---> 90度 PWM_DUTY=65535*(1.5ms/20ms)=4915 # 脉冲宽度:2.5ms ---> 180度 PWM_DUTY=65535*(2.5ms/20ms)=8192 vmin, vmax = (65535*(0.5/20)), (65535*(2.5/20)) def get_angle(angle): duty = int(vmin + (((vmax-vmin)/180) *angle) ) return duty angle = 0 pwm0.duty_u16(get_angle(angle)) utime.sleep(2) while True: angle = 0 pwm0.duty_u16(get_angle(angle)) utime.sleep(1) angle = 45 pwm0.duty_u16(get_angle(angle)) utime.sleep(1) angle = 90 pwm0.duty_u16(get_angle(angle)) utime.sleep(1) angle = 135 pwm0.duty_u16(get_angle(angle)) utime.sleep(1) angle = 180 pwm0.duty_u16(get_angle(angle)) utime.sleep(1)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
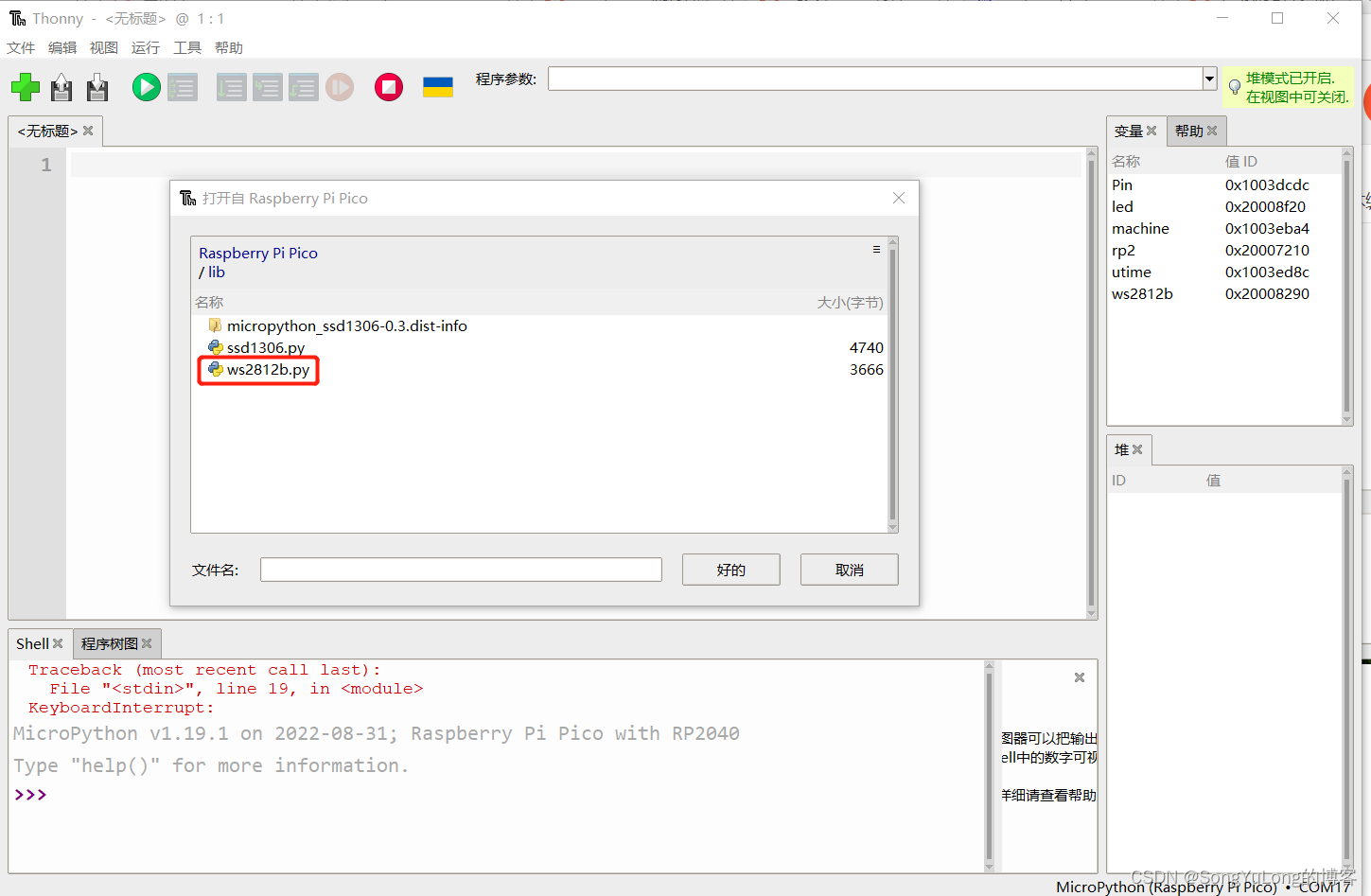
WS2812 RGB灯
将该文件通过Thonny保存到Raspberry PI Pico 的:“/lib/ws2812b.py”目录下
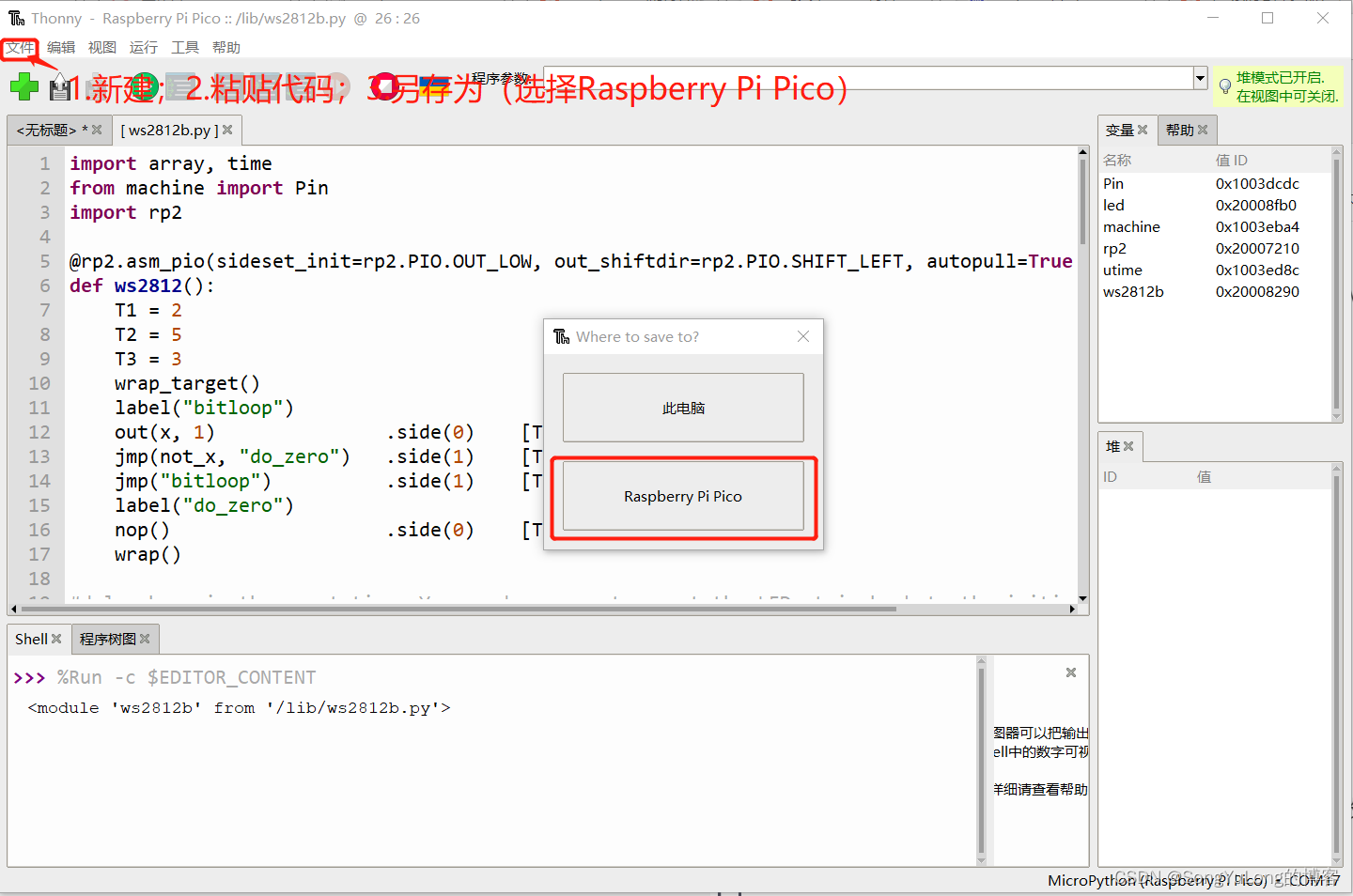
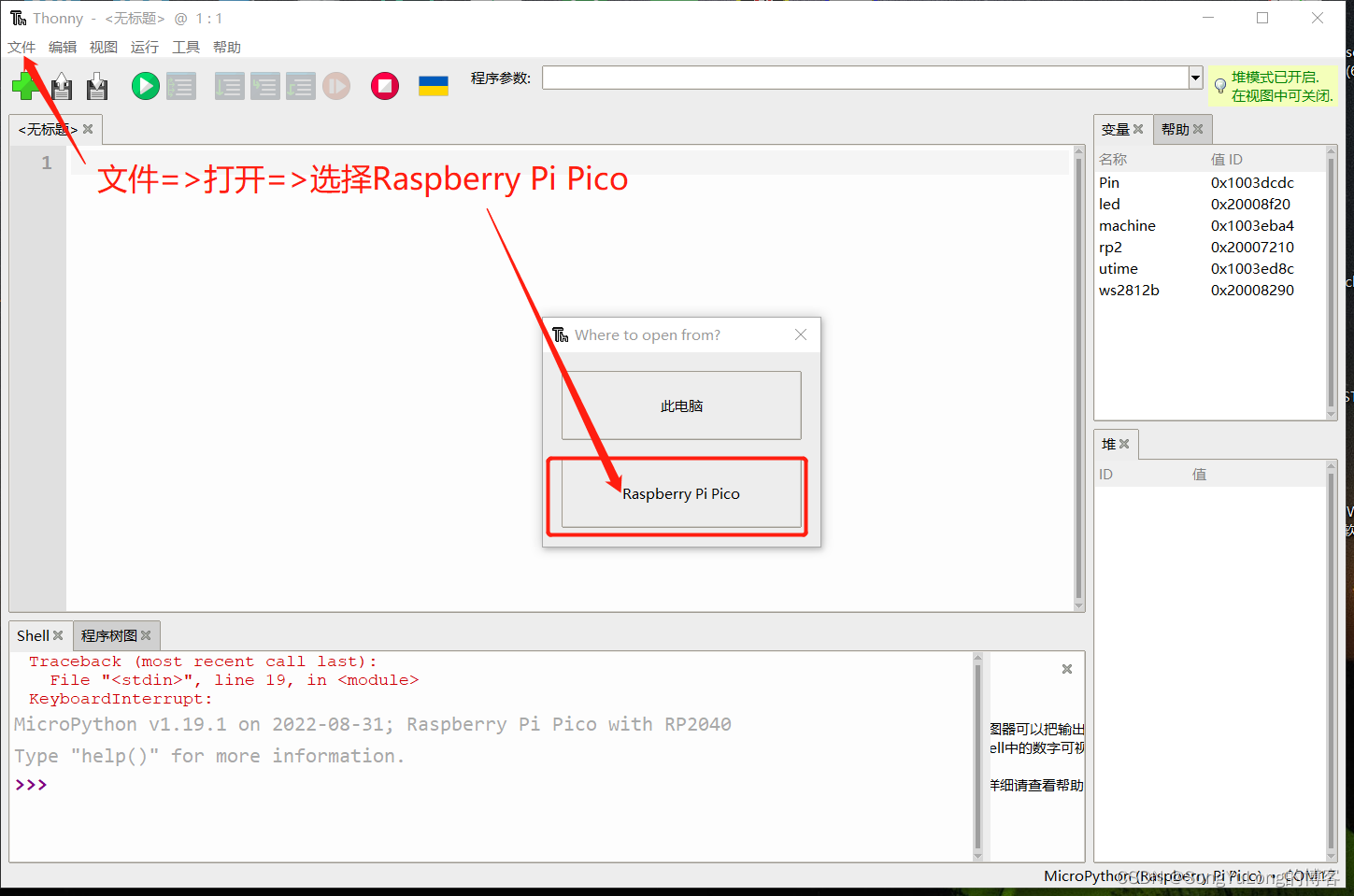
文件已保存到Raspberry Pi Pico内,然后就可以在代码使用import ws2812b
- ws2812b(num, sm, pin)
num代表ws2812的数量
sm是内核,目前需要设置为0
pin是使用的引脚 - set_pixel(n, r, g, b)
n是第几个ws2812
r, b, b是红绿蓝颜色 - show(),刷新显示
- fill((r, g, b)),填充所有ws2812
- set_pixel_line(n1,n2,r,g,b),设置从n1到n2颜色
- set_pixel_line_gradient(n1,n2,r1,g1,b1,r2,g2,b2),设置从n1到n2渐变色
ws2812b.py
import array, time from machine import Pin import rp2 @rp2.asm_pio(sideset_init=rp2.PIO.OUT_LOW, out_shiftdir=rp2.PIO.SHIFT_LEFT, autopull=True, pull_thresh=24) def ws2812(): T1 = 2 T2 = 5 T3 = 3 wrap_target() label("bitloop") out(x, 1) .side(0) [T3 - 1] jmp(not_x, "do_zero") .side(1) [T1 - 1] jmp("bitloop") .side(1) [T2 - 1] label("do_zero") nop() .side(0) [T2 - 1] wrap() #delay here is the reset time. You need a pause to reset the LED strip back to the initial LED #however, if you have quite a bit of processing to do before the next time you update the strip #you could put in delay=0 (or a lower delay) class ws2812b: def __init__(self, num_leds, state_machine, pin, delay=0.001): self.pixels = array.array("I", [0 for _ in range(num_leds)]) self.sm = rp2.StateMachine(state_machine, ws2812, freq=8000000, sideset_base=Pin(pin)) self.sm.active(1) self.num_leds = num_leds self.delay = delay self.brightnessvalue = 255 # Set the overal value to adjust brightness when updating leds def brightness(self, brightness = None): if brightness == None: return self.brightnessvalue else: if (brightness < 1): brightness = 1 if (brightness > 255): brightness = 255 self.brightnessvalue = brightness # Create a gradient with two RGB colors between "pixel1" and "pixel2" (inclusive) def set_pixel_line_gradient(self, pixel1, pixel2, left_red, left_green, left_blue, right_red, right_green, right_blue): if pixel2 - pixel1 == 0: return right_pixel = max(pixel1, pixel2) left_pixel = min(pixel1, pixel2) for i in range(right_pixel - left_pixel + 1): fraction = i / (right_pixel - left_pixel) red = round((right_red - left_red) * fraction + left_red) green = round((right_green - left_green) * fraction + left_green) blue = round((right_blue - left_blue) * fraction + left_blue) self.set_pixel(left_pixel + i, red, green, blue) # Set an array of pixels starting from "pixel1" to "pixel2" to the desired color. def set_pixel_line(self, pixel1, pixel2, red, green, blue): for i in range(pixel1, pixel2+1): self.set_pixel(i, red, green, blue) def set_pixel(self, pixel_num, red, green, blue): # Adjust color values with brightnesslevel blue = round(blue * (self.brightness() / 255)) red = round(red * (self.brightness() / 255)) green = round(green * (self.brightness() / 255)) self.pixels[pixel_num] = blue | red << 8 | green << 16 # rotate x pixels to the left def rotate_left(self, num_of_pixels): if num_of_pixels == None: num_of_pixels = 1 self.pixels = self.pixels[num_of_pixels:] + self.pixels[:num_of_pixels] # rotate x pixels to the right def rotate_right(self, num_of_pixels): if num_of_pixels == None: num_of_pixels = 1 num_of_pixels = -1 * num_of_pixels self.pixels = self.pixels[num_of_pixels:] + self.pixels[:num_of_pixels] def show(self): for i in range(self.num_leds): self.sm.put(self.pixels[i],8) time.sleep(self.delay) def fill(self, red, green, blue): for i in range(self.num_leds): self.set_pixel(i, red, green, blue) time.sleep(self.delay)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
Demo演示代码
from machine import Pin import utime import ws2812b print(str(ws2812b)) led = ws2812b.ws2812b(9, 0, 6) # 参数1:LED灯个数, 参数2:固定填0,参数3:Pin端口号 led.fill(255, 0, 0) led.set_pixel(0, 255, 0, 0) # 设置第一个像素,为红色 #led.set_pixel_line(1, 3, 255, 255, 0) led.set_pixel_line_gradient(0, 8, 255, 0, 0, 0, 255, 0)# 设置渐变 led.show() while True: #led.rotate_left(1) led.rotate_right(1) led.show() utime.sleep(1)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
SSD1306 OLED屏
ssd1306.py保存到pico的/lib目录
# MicroPython SSD1306 OLED driver, I2C and SPI interfaces from micropython import const import framebuf # register definitions SET_CONTRAST = const(0x81) SET_ENTIRE_ON = const(0xA4) SET_NORM_INV = const(0xA6) SET_DISP = const(0xAE) SET_MEM_ADDR = const(0x20) SET_COL_ADDR = const(0x21) SET_PAGE_ADDR = const(0x22) SET_DISP_START_LINE = const(0x40) SET_SEG_REMAP = const(0xA0) SET_MUX_RATIO = const(0xA8) SET_COM_OUT_DIR = const(0xC0) SET_DISP_OFFSET = const(0xD3) SET_COM_PIN_CFG = const(0xDA) SET_DISP_CLK_DIV = const(0xD5) SET_PRECHARGE = const(0xD9) SET_VCOM_DESEL = const(0xDB) SET_CHARGE_PUMP = const(0x8D) # Subclassing FrameBuffer provides support for graphics primitives # http://docs.micropython.org/en/latest/pyboard/library/framebuf.html class SSD1306(framebuf.FrameBuffer): def __init__(self, width, height, external_vcc): self.width = width self.height = height self.external_vcc = external_vcc self.pages = self.height // 8 self.buffer = bytearray(self.pages * self.width) super().__init__(self.buffer, self.width, self.height, framebuf.MONO_VLSB) self.init_display() def init_display(self): for cmd in ( SET_DISP | 0x00, # off # address setting SET_MEM_ADDR, 0x00, # horizontal # resolution and layout SET_DISP_START_LINE | 0x00, SET_SEG_REMAP | 0x01, # column addr 127 mapped to SEG0 SET_MUX_RATIO, self.height - 1, SET_COM_OUT_DIR | 0x08, # scan from COM[N] to COM0 SET_DISP_OFFSET, 0x00, SET_COM_PIN_CFG, 0x02 if self.width > 2 * self.height else 0x12, # timing and driving scheme SET_DISP_CLK_DIV, 0x80, SET_PRECHARGE, 0x22 if self.external_vcc else 0xF1, SET_VCOM_DESEL, 0x30, # 0.83*Vcc # display SET_CONTRAST, 0xFF, # maximum SET_ENTIRE_ON, # output follows RAM contents SET_NORM_INV, # not inverted # charge pump SET_CHARGE_PUMP, 0x10 if self.external_vcc else 0x14, SET_DISP | 0x01, ): # on self.write_cmd(cmd) self.fill(0) self.show() def poweroff(self): self.write_cmd(SET_DISP | 0x00) def poweron(self): self.write_cmd(SET_DISP | 0x01) def contrast(self, contrast): self.write_cmd(SET_CONTRAST) self.write_cmd(contrast) def invert(self, invert): self.write_cmd(SET_NORM_INV | (invert & 1)) def show(self): x0 = 0 x1 = self.width - 1 if self.width == 64: # displays with width of 64 pixels are shifted by 32 x0 += 32 x1 += 32 self.write_cmd(SET_COL_ADDR) self.write_cmd(x0) self.write_cmd(x1) self.write_cmd(SET_PAGE_ADDR) self.write_cmd(0) self.write_cmd(self.pages - 1) self.write_data(self.buffer) class SSD1306_I2C(SSD1306): def __init__(self, width, height, i2c, addr=0x3C, external_vcc=False): self.i2c = i2c self.addr = addr self.temp = bytearray(2) self.write_list = [b"\x40", None] # Co=0, D/C#=1 super().__init__(width, height, external_vcc) def write_cmd(self, cmd): self.temp[0] = 0x80 # Co=1, D/C#=0 self.temp[1] = cmd self.i2c.writeto(self.addr, self.temp) def write_data(self, buf): self.write_list[1] = buf self.i2c.writevto(self.addr, self.write_list) class SSD1306_SPI(SSD1306): def __init__(self, width, height, spi, dc, res, cs, external_vcc=False): self.rate = 10 * 1024 * 1024 dc.init(dc.OUT, value=0) res.init(res.OUT, value=0) cs.init(cs.OUT, value=1) self.spi = spi self.dc = dc self.res = res self.cs = cs import time self.res(1) time.sleep_ms(1) self.res(0) time.sleep_ms(10) self.res(1) super().__init__(width, height, external_vcc) def write_cmd(self, cmd): self.spi.init(baudrate=self.rate, polarity=0, phase=0) self.cs(1) self.dc(0) self.cs(0) self.spi.write(bytearray([cmd])) self.cs(1) def write_data(self, buf): self.spi.init(baudrate=self.rate, polarity=0, phase=0) self.cs(1) self.dc(1) self.cs(0) self.spi.write(buf) self.cs(1)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
from machine import Pin,I2C from ssd1306 import SSD1306_I2C import framebuf import utime import array i2c = I2C(0, scl=Pin(9), sda=Pin(8)) print("I2C Address:", hex(i2c.scan()[0]).upper()) WIDTH = 128 HEIGHT = 64 oled = SSD1306_I2C(WIDTH, HEIGHT, i2c) # Raspberry Pi logo as 32x32 bytearray buffer = bytearray(b"\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00|?\x00\x01\x86@\x80\x01\x01\x80\x80\x01\x11\x88\x80\x01\x05\xa0\x80\x00\x83\xc1\x00\x00C\xe3\x00\x00~\xfc\x00\x00L'\x00\x00\x9c\x11\x00\x00\xbf\xfd\x00\x00\xe1\x87\x00\x01\xc1\x83\x80\x02A\x82@\x02A\x82@\x02\xc1\xc2@\x02\xf6>\xc0\x01\xfc=\x80\x01\x18\x18\x80\x01\x88\x10\x80\x00\x8c!\x00\x00\x87\xf1\x00\x00\x7f\xf6\x00\x008\x1c\x00\x00\x0c \x00\x00\x03\xc0\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00") # Load the raspberry pi logo into the framebuffer (the image is 32x32) fb = framebuf.FrameBuffer(buffer, 32, 32, framebuf.MONO_HLSB) oled.fill(0) oled.blit(fb, (128-32)//2, (64-32)//2) oled.text('RaspberryPi Pico', 0, 48) oled.show() utime.sleep(1) #oled.invert(True) # 反色 #oled.invert(False) # 正常 #oled.poweroff() #oled.poweron() oled.contrast(250) # 0x0~0xFF oled.fill(0) oled.text("Hello", 15, 30) oled.text("RP2040", 15, 40) oled.hline(0,0,60, 1) oled.hline(0,20,60, 1) # 水平线, X,Y, W, 颜色 oled.vline(0,0,20, 1) oled.vline(60,0,20, 1) # 垂直线, X,Y, W, 颜色 oled.rect(80, 0, 40, 10, 1, True) # X,Y, 宽度,高度,颜色,True:实心矩形,False:空心矩形 oled.ellipse(40, 20, 30, 10, 1, True, 0b0010) # 中心X,中心Y,宽度,高度,颜色,实心/空心 象限Q4|Q3|Q2|Q1 oled.pixel(64, 32, 1) # 画一个像素,X,Y, 颜色 coords = array.array('h', [0,0, 15,12, 2,8, 16,26]) # 路径坐标, [x0,y0, x1,y1,...xn,yn] oled.poly(60, 20, coords, 1, False) #多边形 x, y, 路径,颜色,实心/空心 oled.show() while True: # oled.scroll(0,1) oled.show() utime.sleep_ms(200)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
AHT10温湿度传感器
aht10.py另存到pico的/lib/aht10.py
import time from math import log # AHT10 Library for MicroPython on ESP32 # Author: Sean Yong # Date: 23rd December, 2019 # Version 1.0 #CONSTANTS AHT10_ADDRESS = 0x38 # 0111000 (7bit address) AHT10_READ_DELAY_MS = 75 # Time it takes for AHT to collect data AHT_TEMPERATURE_CONST = 200 AHT_TEMPERATURE_OFFSET = 50 KILOBYTE_CONST = 1048576 CMD_INITIALIZE = bytearray([0xE1, 0x08, 0x00]) CMD_MEASURE = bytearray([0xAC, 0x33, 0x00]) FARENHEIT_MULTIPLIER = 9/5 FARENHEIT_OFFSET = 32 class AHT10: def __init__(self, i2c, mode=0, address=AHT10_ADDRESS): if i2c is None: raise ValueError('I2C object required.') if mode is not (0 and 1): raise ValueError('Mode must be either 0 for Celsius or 1 Farenheit') self.i2c = i2c self.address = address self.i2c.writeto(address, CMD_INITIALIZE) self.readings_raw = bytearray(8) self.results_parsed = [0, 0] self.mode = mode # 0 for Celsius, 1 for Farenheit def read_raw(self): self.i2c.writeto(self.address, CMD_MEASURE) time.sleep_ms(AHT10_READ_DELAY_MS) self.readings_raw = self.i2c.readfrom(AHT10_ADDRESS, 6) self.results_parsed[0] = self.readings_raw[1] << 12 | self.readings_raw[2] << 4 | self.readings_raw[3] >> 4 self.results_parsed[1] = (self.readings_raw[3] & 0x0F) << 16 | self.readings_raw[4] << 8 | self.readings_raw[5] def humidity(self): self.read_raw() return (self.results_parsed[0] / KILOBYTE_CONST) * 100 def temperature(self): self.read_raw() if self.mode is 0: return (self.results_parsed[1] / KILOBYTE_CONST) * AHT_TEMPERATURE_CONST - AHT_TEMPERATURE_OFFSET else: return ((self.results_parsed[1] / KILOBYTE_CONST) * AHT_TEMPERATURE_CONST - AHT_TEMPERATURE_OFFSET) * FARENHEIT_MULTIPLIER + FARENHEIT_OFFSET def set_mode(self, mode): if mode is not (0 or 1): raise ValueError('Mode must be either 0 for Celsius or 1 Farenheit') self.mode = mode def print(self): print("Temperature: " + str(self.temperature()) + ("C","F")[self.mode] + ", Humidity: " + str(self.humidity())) def dew_point(self): h = self.humidity() t = self.temperature() prev_mode = self.mode self.mode = 0 h = (log(h, 10) - 2) / 0.4343 + (17.62 * t) / (243.12 + t) return 243.12 * h / (17.62 - h)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
from machine import Pin,I2C import utime import aht10 i2c = I2C(0, sda=Pin(8), scl=Pin(9),freq=400000) devlist = i2c.scan() print("Address List:",devlist) for dev in devlist: print(hex(dev)) aht10 = aht10.AHT10(i2c, mode=0, address=0x38) while True: humi = aht10.humidity() # 湿度 temp = aht10.temperature() # 温度 dewp = aht10.dew_point() # 露点 aht10.print() utime.sleep(1)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
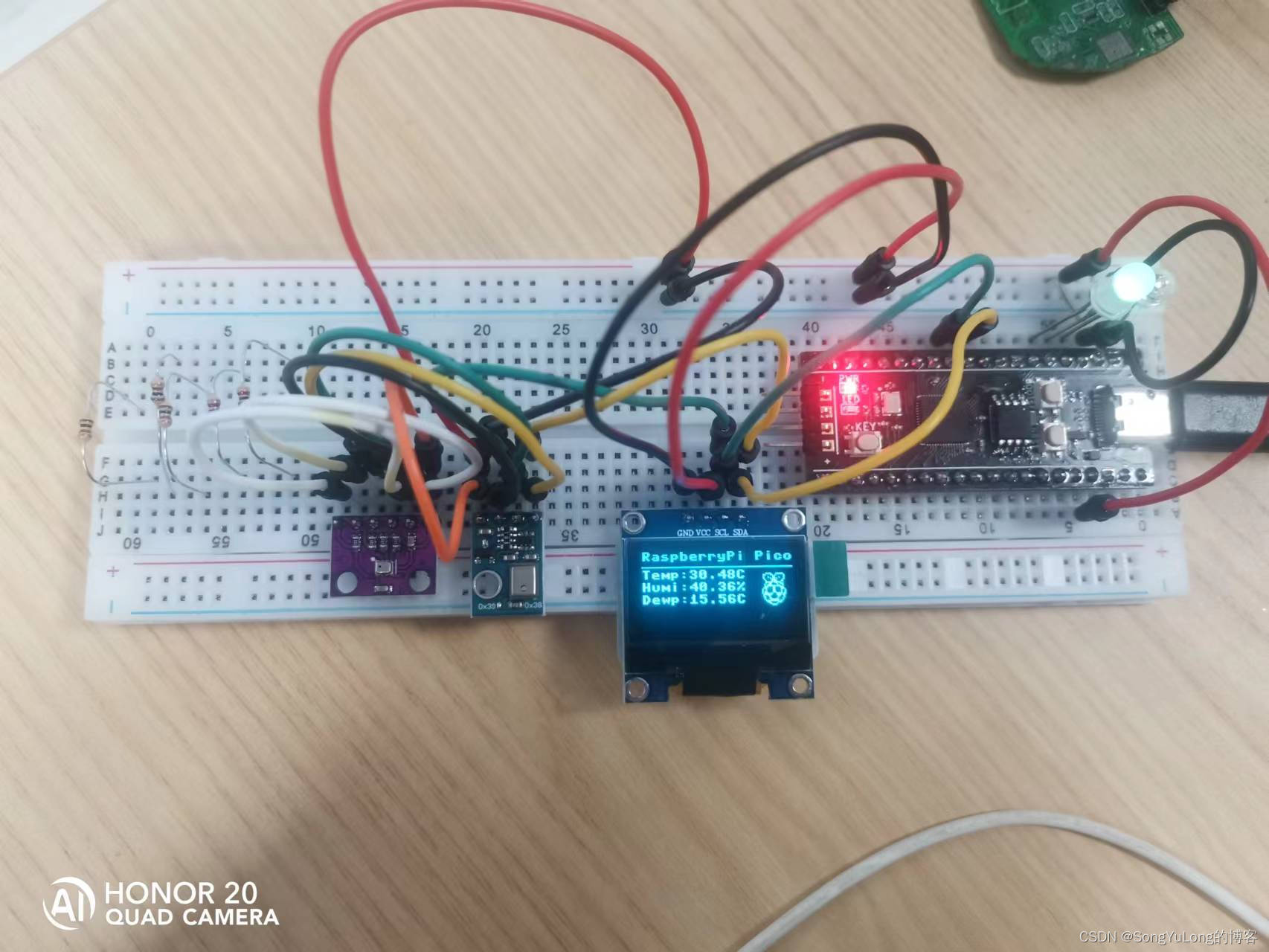
OLED显示AHT10读取值
from machine import Pin,I2C from ssd1306 import SSD1306_I2C,SSD1306_SPI import framebuf import array import utime import aht10 i2c = I2C(0, sda=Pin(8), scl=Pin(9),freq=400000) devlist = i2c.scan() print("Address List:",devlist) for dev in devlist: print(hex(dev)) # Raspberry Pi logo as 32x32 bytearray buffer = bytearray(b"\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00|?\x00\x01\x86@\x80\x01\x01\x80\x80\x01\x11\x88\x80\x01\x05\xa0\x80\x00\x83\xc1\x00\x00C\xe3\x00\x00~\xfc\x00\x00L'\x00\x00\x9c\x11\x00\x00\xbf\xfd\x00\x00\xe1\x87\x00\x01\xc1\x83\x80\x02A\x82@\x02A\x82@\x02\xc1\xc2@\x02\xf6>\xc0\x01\xfc=\x80\x01\x18\x18\x80\x01\x88\x10\x80\x00\x8c!\x00\x00\x87\xf1\x00\x00\x7f\xf6\x00\x008\x1c\x00\x00\x0c \x00\x00\x03\xc0\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00") # Load the raspberry pi logo into the framebuffer (the image is 32x32) fb = framebuf.FrameBuffer(buffer, 32, 32, framebuf.MONO_HLSB) WIDTH = 128 HEIGHT = 64 oled = SSD1306_I2C(WIDTH,HEIGHT,i2c) oled.fill(0) # oled.blit(fb, (128-32)//2, (64-32)//2) oled.text('RaspberryPi Pico', 0, 0) oled.hline(0,12, 128, 1) oled.blit(fb, (128-32), 15) oled.show() aht10 = aht10.AHT10(i2c, mode=0, address=0x38) utime.sleep(1) while True: humi = aht10.humidity() temp = aht10.temperature() dewp = aht10.dew_point() #aht10.print() utime.sleep(0.2) #oled.fill(0) oled.rect(0,15,128-32,45, 0, True) oled.text("Temp:{:.2f}C".format(temp), 0, 15) oled.text("Humi:{:.2f}%".format(humi), 0, 25) oled.text("Dewp:{:.2f}C".format(dewp), 0, 35) oled.show() utime.sleep(1)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
BH1750光照度传感器
bh1750.py
import utime # BH1750 Library for MicroPython on RP2040 # Author: Song YuLong # Date: 2022-10-25 # Version 1.0 #CONSTANTS BH1750_ADDRESS = const (0x23) # 00100011 I2C Slave Address BH1750_READ_DELAY_MS = 180 # measurement time ms. BH1750_POWERDOWN = bytearray([0x00]) # Power Down BH1750_POWERON = bytearray([0x01]) # Power On BH1750_RESET = bytearray([0x07]) # Reset Data Register Value. # Countinue : # One Time : it is automatically set to power down mode after measurement. BH1750_CONTINUE_H_MODE = bytearray([0x10]) # Countinue H-Resolution Mode 1lx 120ms BH1750_CONTINUE_H_MODE2 = bytearray([0x11]) # Countinue H-Resolution Mode 0.5lx 120ms BH1750_CONTINUE_L_MODE = bytearray([0x13]) # Countinue L-Resolution Mode 4lx 16ms BH1750_ONE_TIME_H_MODE = bytearray([0x20]) # One Time H-Resolution Mode 1lx 120ms BH1750_ONE_TIME_H_MODE2 = bytearray([0x21]) # One Time H-Resolution Mode 0.5lx 120ms BH1750_ONE_TIME_L_MODE = bytearray([0x23]) # One Time L-Resolution Mode 4lx 16ms class BH1750: def __init__(self, i2c, mode=0, address=BH1750_ADDRESS): if i2c is None: raise ValueError('I2C object required.') if mode == 0: self.mode = BH1750_CONTINUE_H_MODE elif mode == 1: self.mode = BH1750_CONTINUE_H_MODE2 elif mode == 2: self.mode = BH1750_CONTINUE_L_MODE elif mode == 3: self.mode = BH1750_ONE_TIME_H_MODE elif mode == 4: self.mode = BH1750_ONE_TIME_H_MODE2 elif mode == 5: self.mode = BH1750_ONE_TIME_L_MODE if self.mode == BH1750_CONTINUE_H_MODE2 or self.mode == BH1750_ONE_TIME_H_MODE2: self.resolurtion = 0.5 elif self.mode == BH1750_CONTINUE_H_MODE or self.mode == BH1750_ONE_TIME_H_MODE: self.resolurtion = 1 elif self.mode == BH1750_CONTINUE_L_MODE or self.mode == BH1750_ONE_TIME_L_MODE: self.resolurtion = 4 else: raise ValueError('Mode must be 0 ~ 5') self.i2c = i2c self.address = address self.i2c.writeto(address, BH1750_POWERDOWN) self.i2c.writeto(address, BH1750_POWERON) self.i2c.writeto(address, self.mode) self.rawdata = bytearray(8) self.value = 0.0 def read_raw(self): self.i2c.writeto(self.address, self.mode) utime.sleep_ms(BH1750_READ_DELAY_MS) # max 160ms self.rawdata = self.i2c.readfrom(self.address, 2) def illuminance(self): # illumination =(reg[15:0] * resolurtion) / 1.2 (unit:lx) self.read_raw() self.value = ((self.rawdata[0]<<8 | self.rawdata[1]) * self.resolurtion)/1.2 return self.value def output(self): print("illuminance -->{:.2f}".format(self.value), "LX") def set_mode(self, mode): if mode == 0: self.mode = BH1750_CONTINUE_H_MODE elif mode == 1: self.mode = BH1750_CONTINUE_H_MODE2 elif mode == 2: self.mode = BH1750_CONTINUE_L_MODE elif mode == 3: self.mode = BH1750_ONE_TIME_H_MODE elif mode == 4: self.mode = BH1750_ONE_TIME_H_MODE2 elif mode == 5: self.mode = BH1750_ONE_TIME_L_MODE if self.mode == BH1750_CONTINUE_H_MODE2 or self.mode == BH1750_ONE_TIME_H_MODE2: self.resolurtion = 0.5 elif self.mode == BH1750_CONTINUE_H_MODE or self.mode == BH1750_ONE_TIME_H_MODE: self.resolurtion = 1 elif self.mode == BH1750_CONTINUE_L_MODE or self.mode == BH1750_ONE_TIME_L_MODE: self.resolurtion = 4 else: raise ValueError('Mode must be 0 ~ 5')
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
bh1750_demo.py
from machine import Pin,I2C import utime import bh1750 i2c = I2C(0, sda=Pin(8), scl=Pin(9), freq=200000) devlist = i2c.scan() print(devlist) for dev in devlist: print(hex(dev)) bh1750 = bh1750.BH1750(i2c, mode=1, address=0x23) print("BH1750 Demo...") value = 0.0 while True: value = bh1750.illuminance() print("illuminance:{:.2f} lx".format(value)) #bh1750.output() utime.sleep(0.1)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
BMP280 气压强传感器
bmp280.py
from micropython import const from ustruct import unpack as unp # Author David Stenwall Wahlund (david at dafnet.se) # Power Modes BMP280_POWER_SLEEP = const(0) BMP280_POWER_FORCED = const(1) BMP280_POWER_NORMAL = const(3) BMP280_SPI3W_ON = const(1) BMP280_SPI3W_OFF = const(0) BMP280_TEMP_OS_SKIP = const(0) BMP280_TEMP_OS_1 = const(1) BMP280_TEMP_OS_2 = const(2) BMP280_TEMP_OS_4 = const(3) BMP280_TEMP_OS_8 = const(4) BMP280_TEMP_OS_16 = const(5) BMP280_PRES_OS_SKIP = const(0) BMP280_PRES_OS_1 = const(1) BMP280_PRES_OS_2 = const(2) BMP280_PRES_OS_4 = const(3) BMP280_PRES_OS_8 = const(4) BMP280_PRES_OS_16 = const(5) # Standby settings in ms BMP280_STANDBY_0_5 = const(0) BMP280_STANDBY_62_5 = const(1) BMP280_STANDBY_125 = const(2) BMP280_STANDBY_250 = const(3) BMP280_STANDBY_500 = const(4) BMP280_STANDBY_1000 = const(5) BMP280_STANDBY_2000 = const(6) BMP280_STANDBY_4000 = const(7) # IIR Filter setting BMP280_IIR_FILTER_OFF = const(0) BMP280_IIR_FILTER_2 = const(1) BMP280_IIR_FILTER_4 = const(2) BMP280_IIR_FILTER_8 = const(3) BMP280_IIR_FILTER_16 = const(4) # Oversampling setting BMP280_OS_ULTRALOW = const(0) BMP280_OS_LOW = const(1) BMP280_OS_STANDARD = const(2) BMP280_OS_HIGH = const(3) BMP280_OS_ULTRAHIGH = const(4) # Oversampling matrix # (PRESS_OS, TEMP_OS, sample time in ms) _BMP280_OS_MATRIX = [ [BMP280_PRES_OS_1, BMP280_TEMP_OS_1, 7], [BMP280_PRES_OS_2, BMP280_TEMP_OS_1, 9], [BMP280_PRES_OS_4, BMP280_TEMP_OS_1, 14], [BMP280_PRES_OS_8, BMP280_TEMP_OS_1, 23], [BMP280_PRES_OS_16, BMP280_TEMP_OS_2, 44] ] # Use cases BMP280_CASE_HANDHELD_LOW = const(0) BMP280_CASE_HANDHELD_DYN = const(1) BMP280_CASE_WEATHER = const(2) BMP280_CASE_FLOOR = const(3) BMP280_CASE_DROP = const(4) BMP280_CASE_INDOOR = const(5) _BMP280_CASE_MATRIX = [ [BMP280_POWER_NORMAL, BMP280_OS_ULTRAHIGH, BMP280_IIR_FILTER_4, BMP280_STANDBY_62_5], [BMP280_POWER_NORMAL, BMP280_OS_STANDARD, BMP280_IIR_FILTER_16, BMP280_STANDBY_0_5], [BMP280_POWER_FORCED, BMP280_OS_ULTRALOW, BMP280_IIR_FILTER_OFF, BMP280_STANDBY_0_5], [BMP280_POWER_NORMAL, BMP280_OS_STANDARD, BMP280_IIR_FILTER_4, BMP280_STANDBY_125], [BMP280_POWER_NORMAL, BMP280_OS_LOW, BMP280_IIR_FILTER_OFF, BMP280_STANDBY_0_5], [BMP280_POWER_NORMAL, BMP280_OS_ULTRAHIGH, BMP280_IIR_FILTER_16, BMP280_STANDBY_0_5] ] _BMP280_REGISTER_ID = const(0xD0) _BMP280_REGISTER_RESET = const(0xE0) _BMP280_REGISTER_STATUS = const(0xF3) _BMP280_REGISTER_CONTROL = const(0xF4) _BMP280_REGISTER_CONFIG = const(0xF5) # IIR filter config _BMP280_REGISTER_DATA = const(0xF7) class BMP280: def __init__(self, i2c_bus, addr=0x76, use_case=BMP280_CASE_HANDHELD_DYN): self._bmp_i2c = i2c_bus self._i2c_addr = addr # read calibration data # < little-endian # H unsigned short # h signed short self._T1 = unp('<H', self._read(0x88, 2))[0] self._T2 = unp('<h', self._read(0x8A, 2))[0] self._T3 = unp('<h', self._read(0x8C, 2))[0] self._P1 = unp('<H', self._read(0x8E, 2))[0] self._P2 = unp('<h', self._read(0x90, 2))[0] self._P3 = unp('<h', self._read(0x92, 2))[0] self._P4 = unp('<h', self._read(0x94, 2))[0] self._P5 = unp('<h', self._read(0x96, 2))[0] self._P6 = unp('<h', self._read(0x98, 2))[0] self._P7 = unp('<h', self._read(0x9A, 2))[0] self._P8 = unp('<h', self._read(0x9C, 2))[0] self._P9 = unp('<h', self._read(0x9E, 2))[0] # output raw self._t_raw = 0 self._t_fine = 0 self._t = 0 self._p_raw = 0 self._p = 0 self._h = 0 self.read_wait_ms = 0 # interval between forced measure and readout self._new_read_ms = 200 # interval between self._last_read_ts = 0 if use_case is not None: self.use_case(use_case) def _read(self, addr, size=1): return self._bmp_i2c.readfrom_mem(self._i2c_addr, addr, size) def _write(self, addr, b_arr): if not type(b_arr) is bytearray: b_arr = bytearray([b_arr]) return self._bmp_i2c.writeto_mem(self._i2c_addr, addr, b_arr) def _gauge(self): # TODO limit new reads # read all data at once (as by spec) d = self._read(_BMP280_REGISTER_DATA, 6) self._p_raw = (d[0] << 12) + (d[1] << 4) + (d[2] >> 4) self._t_raw = (d[3] << 12) + (d[4] << 4) + (d[5] >> 4) self._t_fine = 0 self._t = 0 self._p = 0 self._h = 0 def reset(self): self._write(_BMP280_REGISTER_RESET, 0xB6) def load_test_calibration(self): self._T1 = 27504 self._T2 = 26435 self._T3 = -1000 self._P1 = 36477 self._P2 = -10685 self._P3 = 3024 self._P4 = 2855 self._P5 = 140 self._P6 = -7 self._P7 = 15500 self._P8 = -14600 self._P9 = 6000 def load_test_data(self): self._t_raw = 519888 self._p_raw = 415148 def print_calibration(self): print("T1: {} {}".format(self._T1, type(self._T1))) print("T2: {} {}".format(self._T2, type(self._T2))) print("T3: {} {}".format(self._T3, type(self._T3))) print("P1: {} {}".format(self._P1, type(self._P1))) print("P2: {} {}".format(self._P2, type(self._P2))) print("P3: {} {}".format(self._P3, type(self._P3))) print("P4: {} {}".format(self._P4, type(self._P4))) print("P5: {} {}".format(self._P5, type(self._P5))) print("P6: {} {}".format(self._P6, type(self._P6))) print("P7: {} {}".format(self._P7, type(self._P7))) print("P8: {} {}".format(self._P8, type(self._P8))) print("P9: {} {}".format(self._P9, type(self._P9))) def _calc_t_fine(self): # From datasheet page 22 self._gauge() if self._t_fine == 0: var1 = (((self._t_raw >> 3) - (self._T1 << 1)) * self._T2) >> 11 var2 = (((((self._t_raw >> 4) - self._T1) * ((self._t_raw >> 4) - self._T1)) >> 12) * self._T3) >> 14 self._t_fine = var1 + var2 @property def temperature(self): self._calc_t_fine() if self._t == 0: self._t = ((self._t_fine * 5 + 128) >> 8) / 100. return self._t @property def pressure(self): # From datasheet page 22 self._calc_t_fine() if self._p == 0: var1 = self._t_fine - 128000 var2 = var1 * var1 * self._P6 var2 = var2 + ((var1 * self._P5) << 17) var2 = var2 + (self._P4 << 35) var1 = ((var1 * var1 * self._P3) >> 8) + ((var1 * self._P2) << 12) var1 = (((1 << 47) + var1) * self._P1) >> 33 if var1 == 0: return 0 p = 1048576 - self._p_raw p = int((((p << 31) - var2) * 3125) / var1) var1 = (self._P9 * (p >> 13) * (p >> 13)) >> 25 var2 = (self._P8 * p) >> 19 p = ((p + var1 + var2) >> 8) + (self._P7 << 4) self._p = p / 256.0 return self._p @property def altitude_p_t(self): ''' Calculate altitude from current temperature and pressure. h = ( (((P0/P)^(1/5.257))-1) * (T + 237.15) ) / 0.0065 h:altitude (m) P0:101.325(kPa) P:current pressure in kPa T:current temperature in Celsius ''' self._h = ( (((101.325/(self._p/1000))**(1/5.257))-1) * (self._t + 273.15) ) / 0.0065 return self._h @property def altitude_p(self): self._h = 44330 * (1 - (((self._p/1000)/101.325)**(1/5.255))) return self._h def _write_bits(self, address, value, length, shift=0): d = self._read(address)[0] m = int('1' * length, 2) << shift d &= ~m d |= m & value << shift self._write(address, d) def _read_bits(self, address, length, shift=0): d = self._read(address)[0] return d >> shift & int('1' * length, 2) @property def standby(self): return self._read_bits(_BMP280_REGISTER_CONFIG, 3, 5) @standby.setter def standby(self, v): assert 0 <= v <= 7 self._write_bits(_BMP280_REGISTER_CONFIG, v, 3, 5) @property def iir(self): return self._read_bits(_BMP280_REGISTER_CONFIG, 3, 2) @iir.setter def iir(self, v): assert 0 <= v <= 4 self._write_bits(_BMP280_REGISTER_CONFIG, v, 3, 2) @property def spi3w(self): return self._read_bits(_BMP280_REGISTER_CONFIG, 1) @spi3w.setter def spi3w(self, v): assert v in (0, 1) self._write_bits(_BMP280_REGISTER_CONFIG, v, 1) @property def temp_os(self): return self._read_bits(_BMP280_REGISTER_CONTROL, 3, 5) @temp_os.setter def temp_os(self, v): assert 0 <= v <= 5 self._write_bits(_BMP280_REGISTER_CONTROL, v, 3, 5) @property def press_os(self): return self._read_bits(_BMP280_REGISTER_CONTROL, 3, 2) @press_os.setter def press_os(self, v): assert 0 <= v <= 5 self._write_bits(_BMP280_REGISTER_CONTROL, v, 3, 2) @property def power_mode(self): return self._read_bits(_BMP280_REGISTER_CONTROL, 2) @power_mode.setter def power_mode(self, v): assert 0 <= v <= 3 self._write_bits(_BMP280_REGISTER_CONTROL, v, 2) @property def is_measuring(self): return bool(self._read_bits(_BMP280_REGISTER_STATUS, 1, 3)) @property def is_updating(self): return bool(self._read_bits(_BMP280_REGISTER_STATUS, 1)) @property def chip_id(self): return self._read(_BMP280_REGISTER_ID, 2) @property def in_normal_mode(self): return self.power_mode == BMP280_POWER_NORMAL def force_measure(self): self.power_mode = BMP280_POWER_FORCED def normal_measure(self): self.power_mode = BMP280_POWER_NORMAL def sleep(self): self.power_mode = BMP280_POWER_SLEEP def use_case(self, uc): assert 0 <= uc <= 5 pm, oss, iir, sb = _BMP280_CASE_MATRIX[uc] p_os, t_os, self.read_wait_ms = _BMP280_OS_MATRIX[oss] self._write(_BMP280_REGISTER_CONFIG, (iir << 2) + (sb << 5)) self._write(_BMP280_REGISTER_CONTROL, pm + (p_os << 2) + (t_os << 5)) def oversample(self, oss): assert 0 <= oss <= 4 p_os, t_os, self.read_wait_ms = _BMP280_OS_MATRIX[oss] self._write_bits(_BMP280_REGISTER_CONTROL, p_os + (t_os << 3), 2)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
- 298
- 299
- 300
- 301
- 302
- 303
- 304
- 305
- 306
- 307
- 308
- 309
- 310
- 311
- 312
- 313
- 314
- 315
- 316
- 317
- 318
- 319
- 320
- 321
- 322
- 323
- 324
- 325
- 326
- 327
- 328
- 329
- 330
- 331
- 332
- 333
- 334
- 335
- 336
- 337
- 338
- 339
- 340
- 341
- 342
- 343
- 344
bmp280_demo.py
from machine import Pin, I2C import utime import bmp280 import math from ustruct import unpack as unp i2c = I2C(0, sda=Pin(8), scl=Pin(9), freq=200000) devlist = i2c.scan() print(devlist) for dev in devlist: print(hex(dev)) print("BMP280 Demo...") bmp280 = bmp280.BMP280(i2c_bus=i2c, addr=0x76) bmp280.use_case(1) bmp280.oversample(1) bmp280.iir = 2 bmp280.temp_os=2 bmp280.press_os=2 bmp280.print_calibration() print(bmp280.chip_id) while True: t = bmp280.temperature p = bmp280.pressure h = bmp280.altitude_p_t # calculate altitude from pressure and temperature h1 = bmp280.altitude_p # calculate altitude from pressure print("P:{:.2f}(kPa)".format(p/1000),"T:{:.2f}(C)".format(t), "H:{:.2f}(m)".format(h), "H1:{:.2f}(m)".format(h1)) #print(p, t, h, h1) utime.sleep(0.5)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
运行效果:

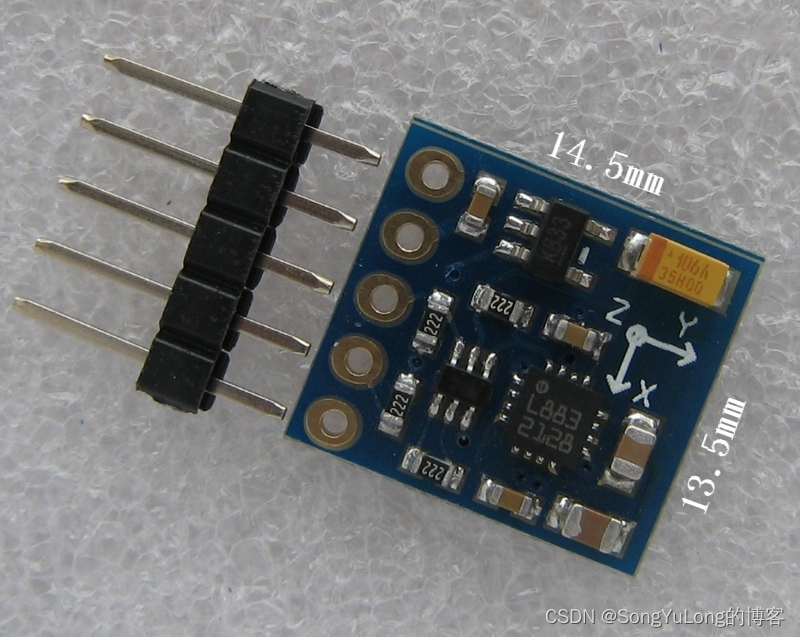
HMC5883L地磁传感器
IC丝印L883为HMC8553L
IC丝印5883为QMC5883L
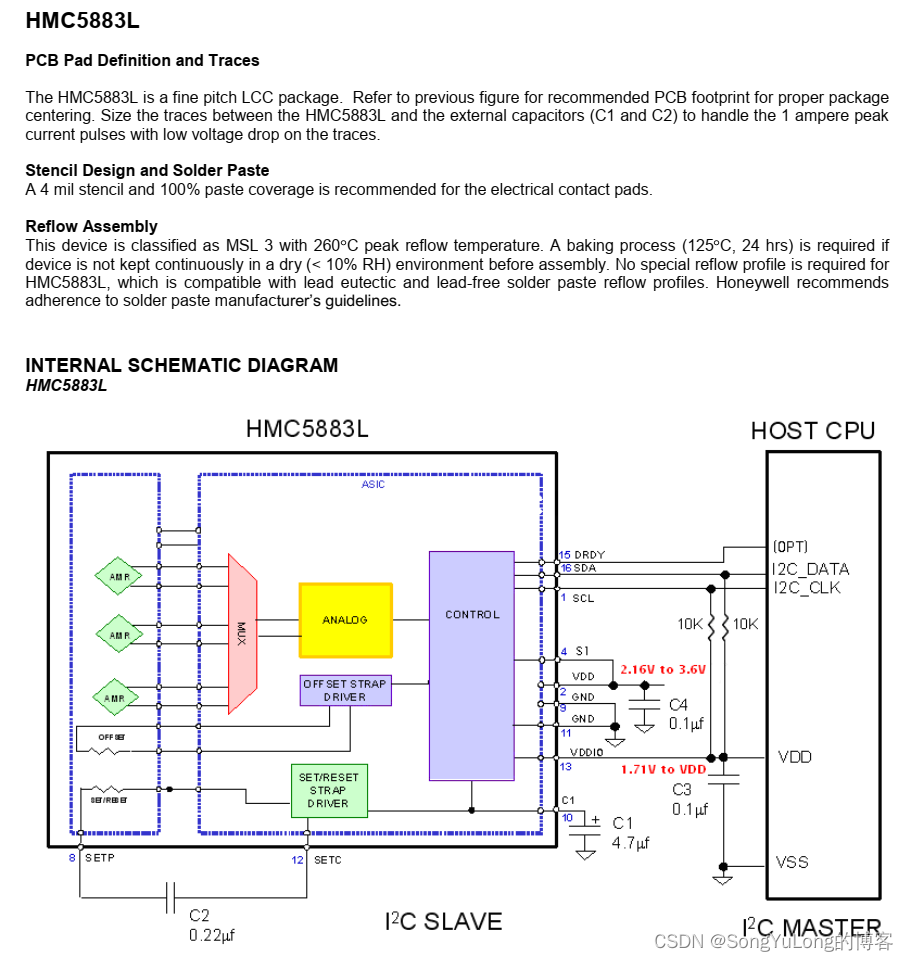
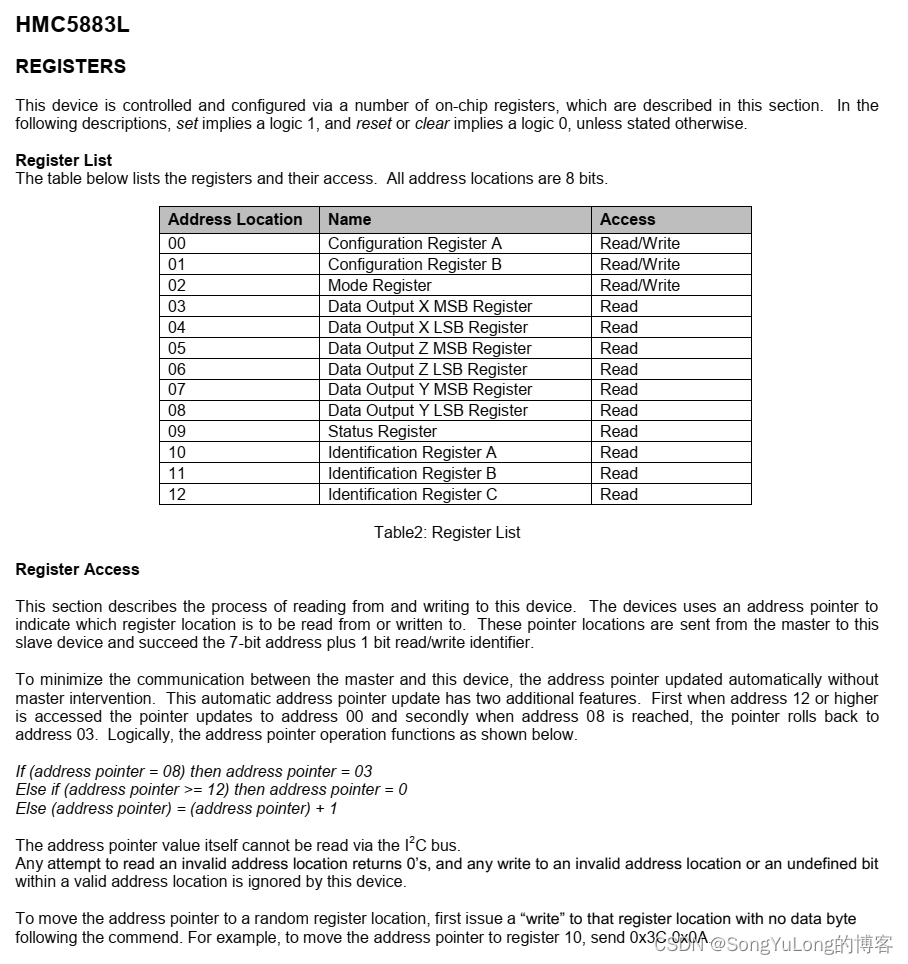
库模块/lib/hmc5883l.py
import math import machine from ustruct import pack from array import array class HMC5883L: __gain__ = { '0.88': (0 << 5, 0.73), '1.3': (1 << 5, 0.92), '1.9': (2 << 5, 1.22), '2.5': (3 << 5, 1.52), '4.0': (4 << 5, 2.27), '4.7': (5 << 5, 2.56), '5.6': (6 << 5, 3.03), '8.1': (7 << 5, 4.35) } def __init__(self, i2c, address=30, gauss='1.3', declination=(0, 0)): self.i2c = i2c self.address = address # Initialize sensor. #i2c.start() # Configuration register A: # 0bx11xxxxx -> 8 samples averaged per measurement # 0bxxx100xx -> 15 Hz, rate at which data is written to output registers # 0bxxxxxx00 -> Normal measurement mode i2c.writeto_mem(self.address, 0x00, pack('B', 0b111000)) # Configuration register B: reg_value, self.gain = self.__gain__[gauss] i2c.writeto_mem(self.address, 0x01, pack('B', reg_value)) # Set mode register to continuous mode. i2c.writeto_mem(self.address, 0x02, pack('B', 0x00)) #i2c.stop() # Convert declination (tuple of degrees and minutes) to radians. self.declination = (declination[0] + declination[1] / 60) * math.pi / 180 # Reserve some memory for the raw xyz measurements. self.data = array('B', [0] * 6) def read(self): data = self.data gain = self.gain self.i2c.readfrom_mem_into(self.address, 0x03, data) x = (data[0] << 8) | data[1] z = (data[2] << 8) | data[3] y = (data[4] << 8) | data[5] x = x - (1 << 16) if x & (1 << 15) else x y = y - (1 << 16) if y & (1 << 15) else y z = z - (1 << 16) if z & (1 << 15) else z x = round(x * gain, 4) y = round(y * gain, 4) z = round(z * gain, 4) return x, y, z def heading(self, x, y): heading_rad = math.atan2(y, x) heading_rad += self.declination # Correct reverse heading. if heading_rad < 0: heading_rad += 2 * math.pi # Compensate for wrapping. elif heading_rad > 2 * math.pi: heading_rad -= 2 * math.pi # Convert from radians to degrees. heading = heading_rad * 180 / math.pi degrees = math.floor(heading) minutes = round((heading - degrees) * 60) return degrees, minutes def format_result(self, x, y, z): degrees, minutes = self.heading(x, y) return 'X: {:.4f}, Y: {:.4f}, Z: {:.4f}, Heading: {}° {}′ '.format(x, y, z, degrees, minutes)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
hmc5883l_demo.py
from machine import Pin,I2C import utime from hmc5883l import HMC5883L from ssd1306 import SSD1306_I2C,SSD1306_SPI i2c0 = I2C(0, sda=Pin(8), scl=Pin(9),freq=400000) devlist = i2c0.scan() print("I2C0 Address List:",devlist) for dev in devlist: print(hex(dev)) mSensor = HMC5883L(i2c0, address=0x1e, gauss='1.3') while True: x, y, z = mSensor.read() print(mSensor.format_result(x, y, z)) utime.sleep(0.1)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
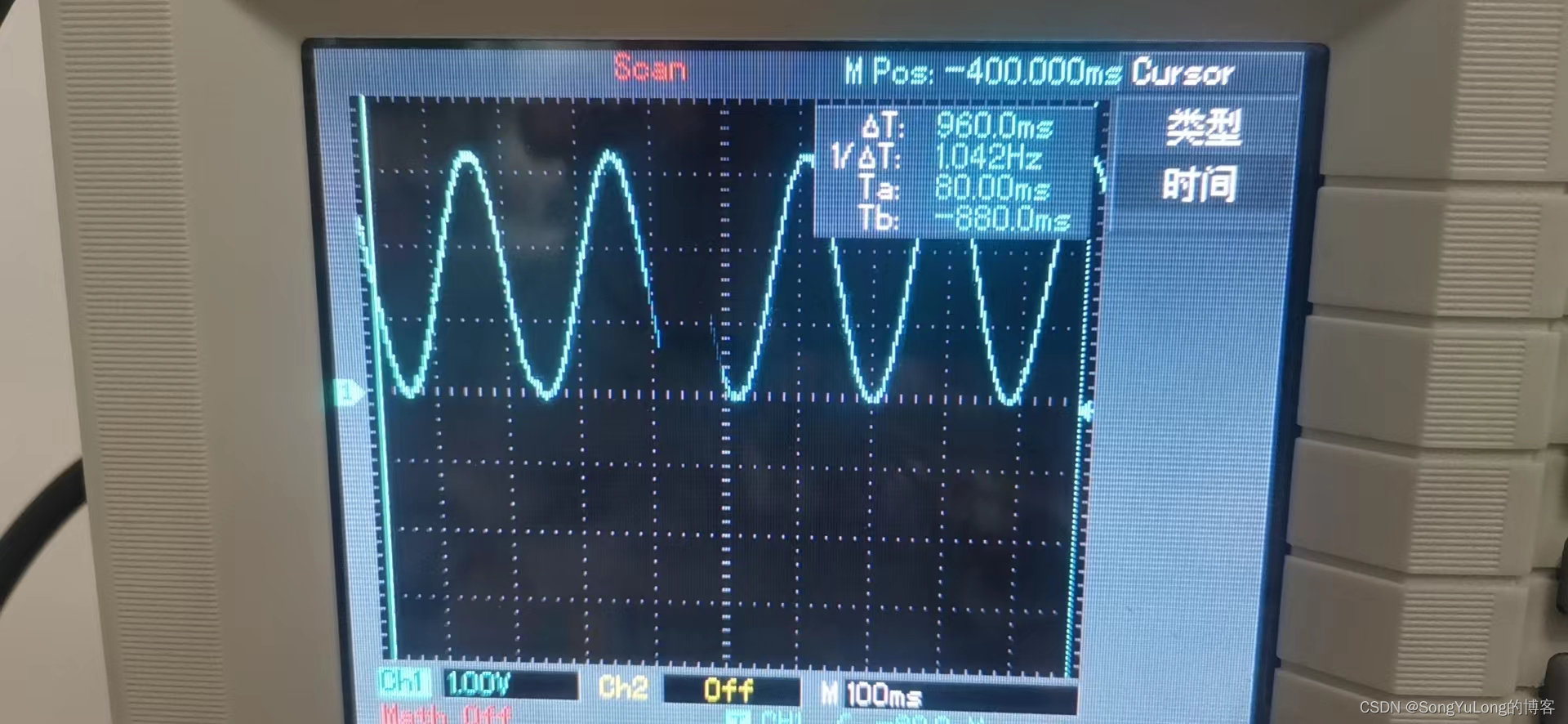
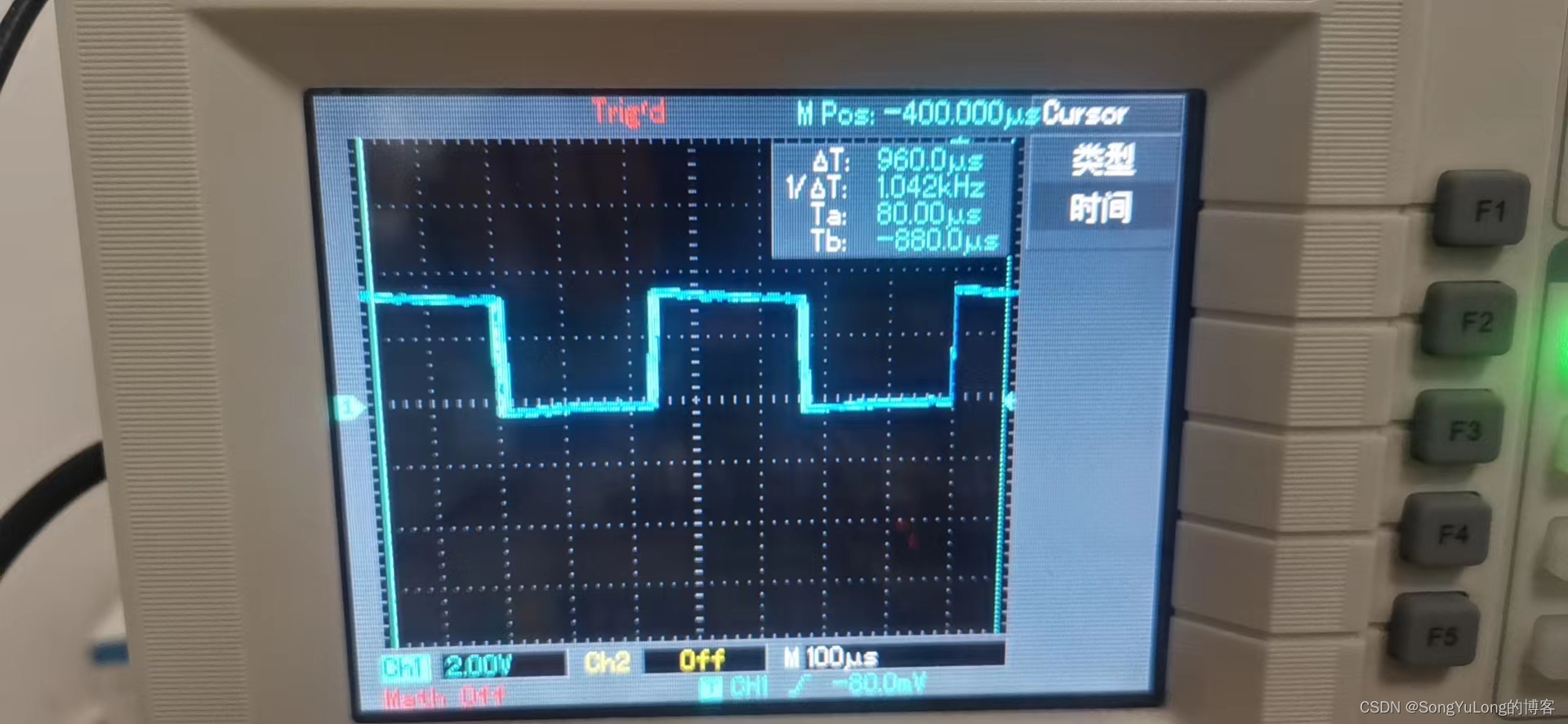
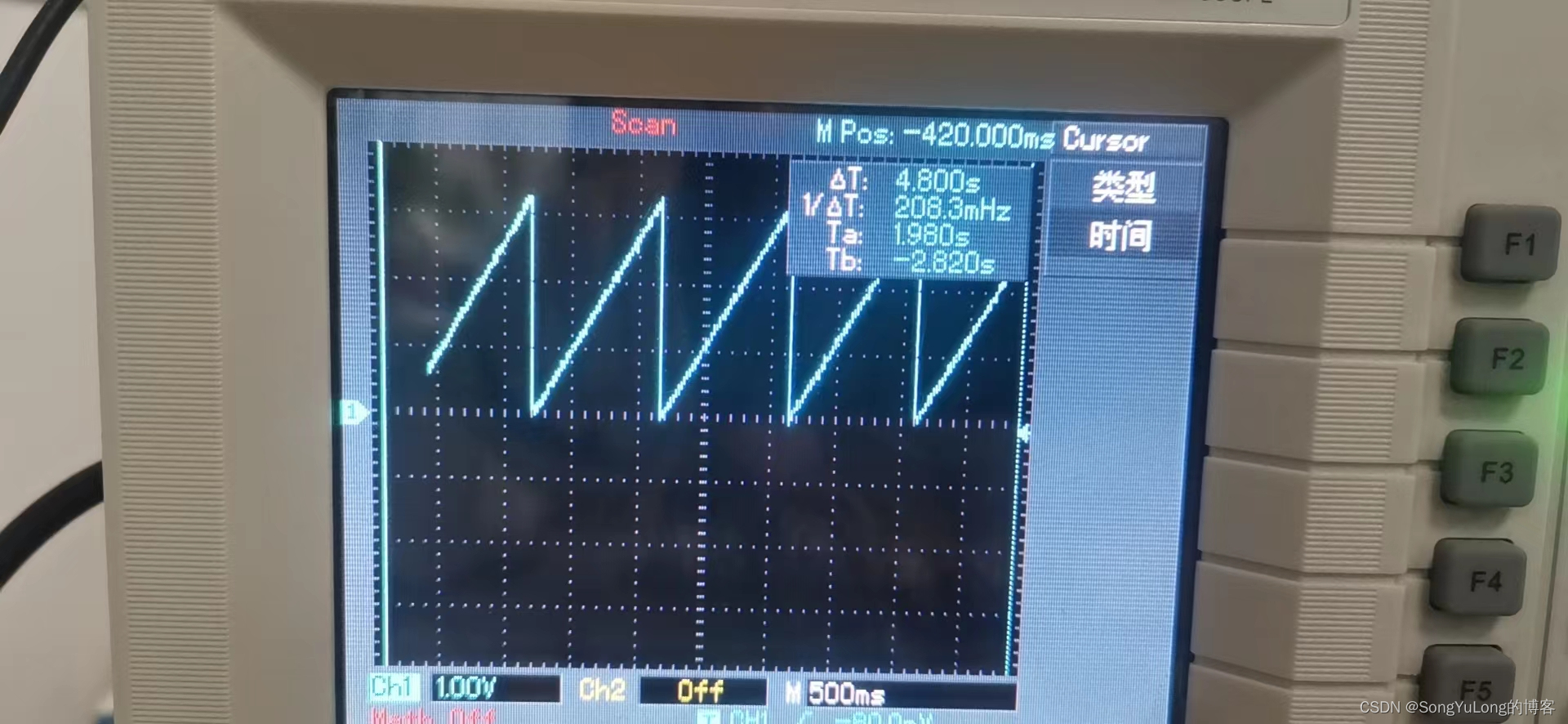
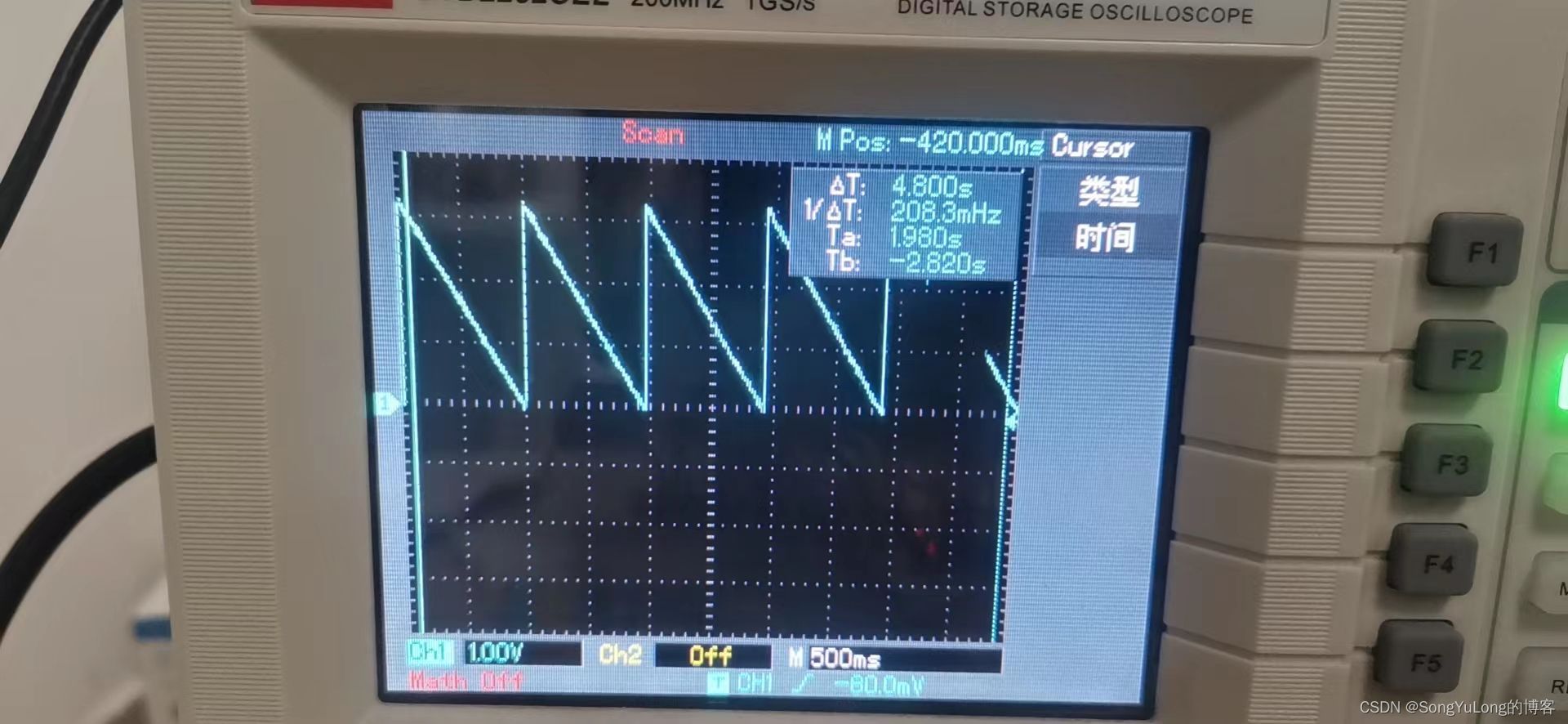
MCP4725数模转换
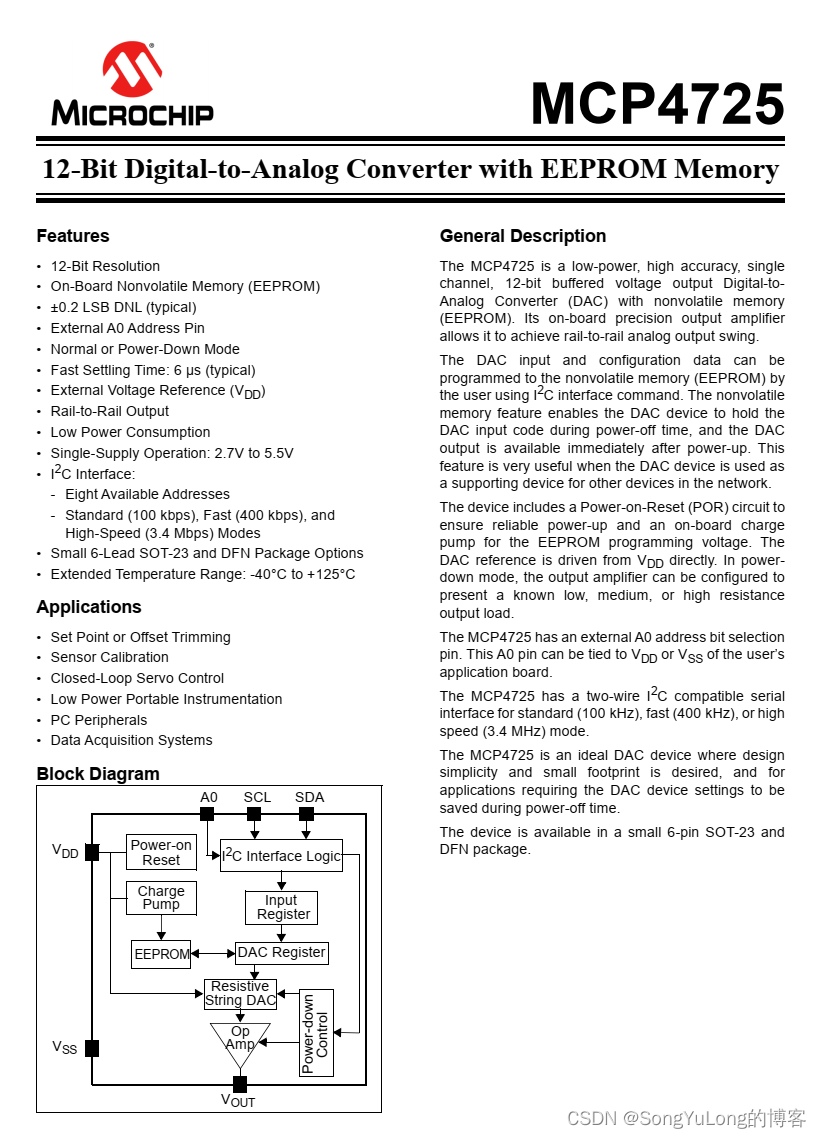
/lib/mcp4725.py
#Library for the MCP4725 I2C bus DAC from machine import I2C #The MCP4725 has support from 2 addresses BUS_ADDRESS = [0x60,0x62,0x63] #The device supports a few power down modes on startup and during operation POWER_DOWN_MODE = {'Off':0, '1k':1, '100k':2, '500k':3} class MCP4725: def __init__(self,i2c, address=BUS_ADDRESS[0]) : self.i2c=i2c self.address=address self._writeBuffer=bytearray(2) def write(self,value): if value < 0: value=0 value=value & 0xFFF self._writeBuffer[0]=(value>>8) & 0xFF self._writeBuffer[1]=value & 0xFF return self.i2c.writeto(self.address,self._writeBuffer)==2 def read(self): buf=bytearray(5) if self.i2c.readfrom_into(self.address,buf) ==5: eeprom_write_busy=(buf[0] & 0x80)==0 power_down=self._powerDownKey((buf[0] >> 1) & 0x03) value=((buf[1]<<8) | (buf[2])) >> 4 eeprom_power_down=self._powerDownKey((buf[3]>>5) & 0x03) eeprom_value=((buf[3] & 0x0f)<<8) | buf[4] return (eeprom_write_busy,power_down,value,eeprom_power_down,eeprom_value) return None def config(self,power_down='Off',value=0,eeprom=False): buf=bytearray() conf=0x40 | (POWER_DOWN_MODE[power_down] << 1) if eeprom: #store the powerdown and output value in eeprom conf=conf | 0x60 buf.append(conf) #check value range if value<0: value=0 value=value & 0xFFF buf.append(value >> 4) buf.append((value & 0x0F)<<4) return self.i2c.writeto(self.address,buf)==3 def _powerDownKey(self,value): for key,item in POWER_DOWN_MODE.items(): if item == value: return key
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
mcp4725_demo.py
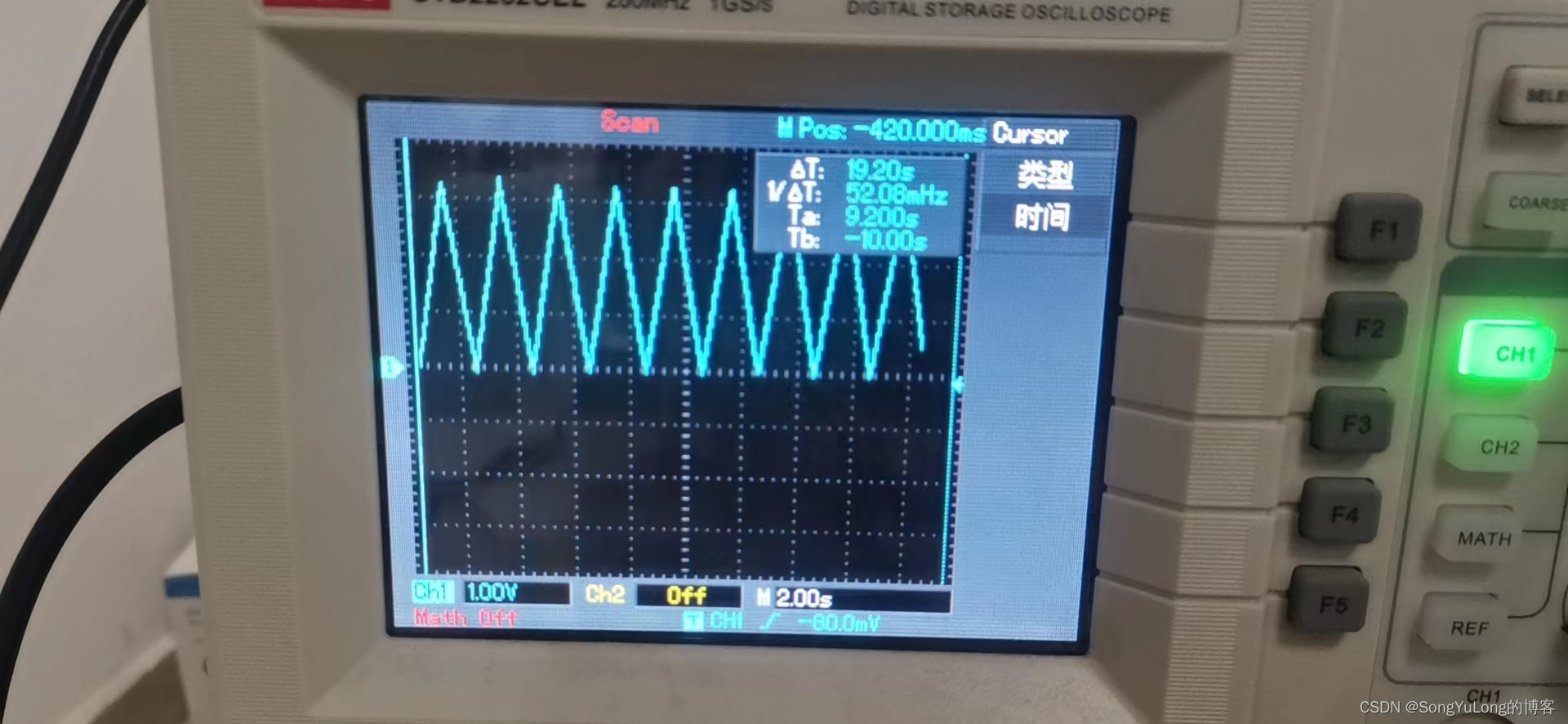
from machine import Pin,I2C import mcp4725 import utime import math import machine i2c0 = I2C(0, sda=Pin(8), scl=Pin(9), freq=400000) devlist = i2c0.scan() print(devlist) for dev in devlist: print(hex(dev)) #create the MCP4725 driver dac=mcp4725.MCP4725(i2c0,mcp4725.BUS_ADDRESS[0]) #configure the DAC to output ``Vdd/2`` on power-up or after a reset #dac.config('Off',2048, eeprom=True) #configure the DAC to go into power-down mode and set the output value to maximum output. dac.config('100k',4096) print(dac.read()) x = 0 value = 0 updown = True while True: # print(value) dac.write(value) # 正弦波 value = 2048+int(math.sin(x)*2048) x += 0.01 if x >= 360: x = 0.0 # 方波 ''' if value == 0: value = 4095 else: value = 0 ''' # 锯齿波 正 ''' if value < 4096: value += 1 elif value == 4096: value=0 ''' # 锯齿波 反 ''' if value > 0: value -= 1 elif value <= 0: value = 4095 ''' # 三角波 ''' if updown : value+=1 else: value-=1 if value == 4096: updown = False elif value == 0: updown = True '''
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
正弦波
方波
锯齿波
三角波
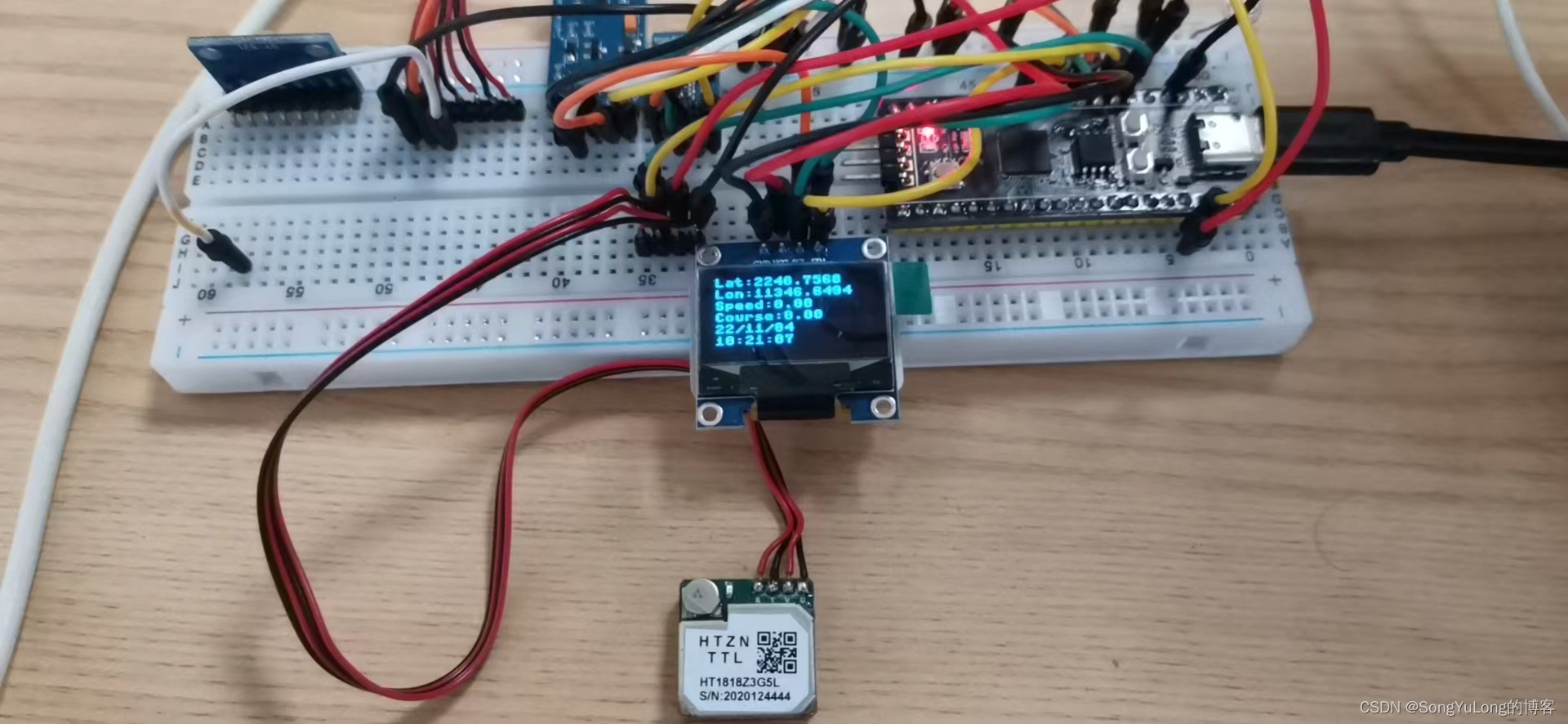
GNSS导航模块

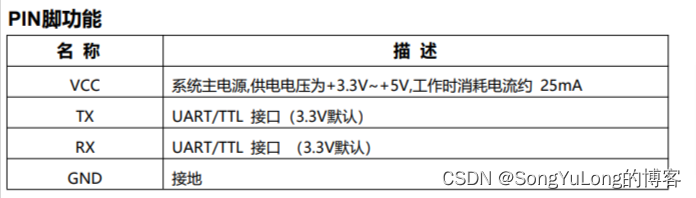
navigation.py
# # songyulong # 2022-11-03 # GNSS 模块库 # GNSS(Global Navigation Satellite System) 的全称是全球导航卫星系统 # 保存配置参数命令 CAS00 CMD_SAVE_CONFIG = const(b'$PCAS00*01\r\n') # save configuration information to flash # 串口通信波特率设置命令 CAS01 CMD_SET_BAUDRATE_4800bps = const(b'$PCAS01,0*1C\r\n') CMD_SET_BAUDRATE_9600bps = const(b'$PCAS01,1*1D\r\n') CMD_SET_BAUDRATE_19200bps = const(b'$PCAS01,2*1E\r\n') CMD_SET_BAUDRATE_38400bps = const(b'$PCAS01,3*1F\r\n') CMD_SET_BAUDRATE_57600bps = const(b'$PCAS01,4*18\r\n') CMD_SET_BAUDRATE_115200bps= const(b'$PCAS01,5*19\r\n') # 设定定位更新率 CAS02 CMD_SET_UPDATE_FREQ_1HZ = const(b'$PCAS02,1000*2E\r\n') CMD_SET_UPDATE_FREQ_2HZ = const(b'$PCAS02,500*1A\r\n') CMD_SET_UPDATE_FREQ_4HZ = const(b'$PCAS02,250*18\r\n') CMD_SET_UPDATE_FREQ_5HZ = const(b'$PCAS02,200*1D\r\n') CMD_SET_UPDATE_FREQ_10HZ= const(b'$PCAS02,100*1E\r\n') # 设置要求输出或停止输出的 NMEA 语句。CAS03 # 配置工作系统 CAS04 GPS:美国,BDS:中国, GLONASS:俄罗斯 CMD_SET_SYS_GPS = const(b'$PCAS04,1*18\r\n') CMD_SET_SYS_BDS = const(b'$PCAS04,2*1B\r\n') CMD_SET_SYS_GPS_BDS = const(b'$PCAS04,3*1A\r\n') CMD_SET_SYS_GLONASS = const(b'$PCAS04,4*1D\r\n') CMD_SET_SYS_GPS_GLONASS = const(b'$PCAS04,5*1C\r\n') CMD_SET_SYS_BDS_GLONASS = const(b'$PCAS04,6*1F\r\n') CMD_SET_SYS_GPS_BDS_GLONASS = const(b'$PCAS04,7*1E\r\n') # 接收机重启 CAS10 CMD_RESTART_Hot = const(b'$PCAS10,0*1C\r\n') # 热启动 :不使用初始化信息,备份存储中的所有数据有效 CMD_RESTART_Warm = const(b'$PCAS10,1*1D\r\n') # 温启动 :不使用初始化信息,清除星历 CMD_RESTART_Cold = const(b'$PCAS10,2*1E\r\n') # 冷启动 :不使用初始化信息,清除备份存储中除配置外的所有数据。 CMD_RESTART_Factory = const(b'$PCAS10,3*1F\r\n') # 出厂启动 :清除内存所有数据,并将接收机复位至出厂默认配置 class NAVIGATION: def __init__(self, uart, mode=CMD_SET_SYS_GPS_BDS, update_freq=CMD_SET_UPDATE_FREQ_1HZ): self.uart = uart self.mode = mode self.update_freq = update_freq self.longitude = 0 self.latitude = 0 self.speed = 0 self.course = 0 self.year = 0 self.month = 0 self.day = 0 self.hour = 0 self.minute = 0 self.second = 0 self.rxbuf = bytes() self.send_command(self.mode) self.send_command(self.update_freq) def deinit(self): self.uart.deinit() def send_command(self, cmd): self.uart.write(cmd) def recv_loop(self): while self.uart.any() > 0: #self.rxbuf=self.uart.readline() #self.parse_message(self.rxbuf) c = self.uart.read(1) self.rxbuf += c if c == b'\n': # 一行报文结收结束 self.parse_message(self.rxbuf) self.rxbuf = b'' def parse_message(self,msg): try: root = msg.decode('utf-8') #print(root) if (root.startswith('$GNRMC') or root.startswith('$BDRMC') or root.startswith('$GPRMC')): # GNRMC = root.split(',') if GNRMC[2] == 'A': # 'A':有效, 'V':无效 #print(GNRMC) self.hour = int(GNRMC[1][0:2]) self.minute = int(GNRMC[1][2:4]) self.second = int(GNRMC[1][4:6]) #ms = int(GNRMC[1][7:10]) self.day = int(GNRMC[9][0:2]) self.month = int(GNRMC[9][2:4]) self.year = int(GNRMC[9][4:6]) if GNRMC[4] == 'N': # 北纬 self.latitude = float(GNRMC[3]) elif GNRMC[4] == 'S': # 南纬 self.latitude = -(float(GNRMC[3])) if GNRMC[6] == 'E': # 东经 self.longitude = float(GNRMC[5]) elif GNRMC[6] == 'W': # 西经 self.longitude = -(float(GNRMC[5])) self.speed = float(GNRMC[7]) self.course = float(GNRMC[8]) #print(self.longitude, self.latitude, self.speed, self.course) else: self.latitude = 0 self.longitude = 0 elif (root.startswitch('$BDGSV')): print('BDGSV') except: pass pass
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
from machine import Pin,I2C,UART from ssd1306 import SSD1306_I2C,SSD1306_SPI import framebuf import utime import navigation from navigation import * import _thread i2c0 = I2C(0, sda=Pin(8), scl=Pin(9),freq=400000) WIDTH = 128 HEIGHT = 64 oled = SSD1306_I2C(WIDTH,HEIGHT,i2c0) oled.fill(0) uart0 = UART(1, baudrate=9600, bits=8, parity=None, stop=1, tx=Pin(4), rx=Pin(5), ) nav = navigation.NAVIGATION(uart0) nav.send_command(CMD_SET_SYS_BDS) nav.send_command(CMD_SET_UPDATE_FREQ_1HZ) # 导航模块结束数据任务 def navigation_task(delay): while True: nav.recv_loop() utime.sleep_ms(delay) _thread.start_new_thread(navigation_task, (1,) ) utime.sleep(1.5) while True: #nav.recv_loop() oled.fill(0) oled.text("Lat:{:.4f}".format(nav.latitude), 0, 0) oled.text("Lon:{:.4f}".format(nav.longitude), 0, 10) oled.text("Speed:{:.2f}".format(nav.speed), 0, 20) oled.text("Course:{:.2f}".format(nav.course), 0, 30) oled.text("{:02d}/{:02d}/{:02d}".format(nav.year, nav.month, nav.day), 0, 40) oled.text("{:02d}:{:02d}:{:02d}".format(nav.hour+8, nav.minute, nav.second), 0, 50) oled.show() #print("main loop....", nav.longitude, nav.latitude, nav.speed, nav.course) utime.sleep(1)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
无线串口模块(LoRa 433M)
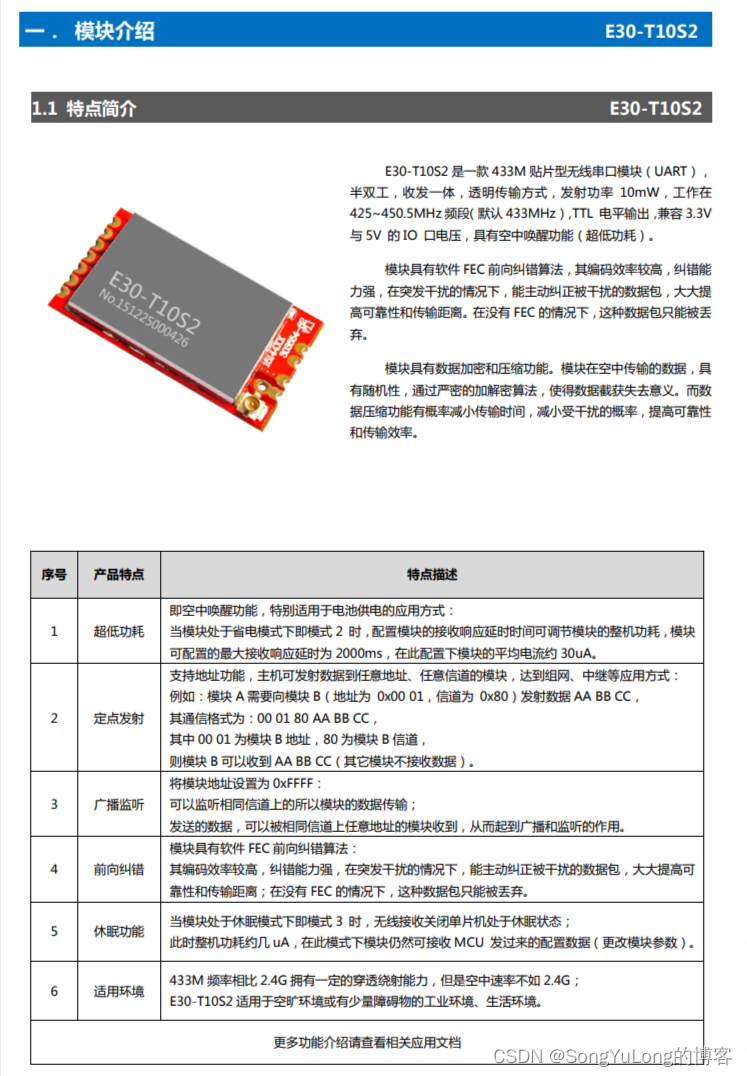
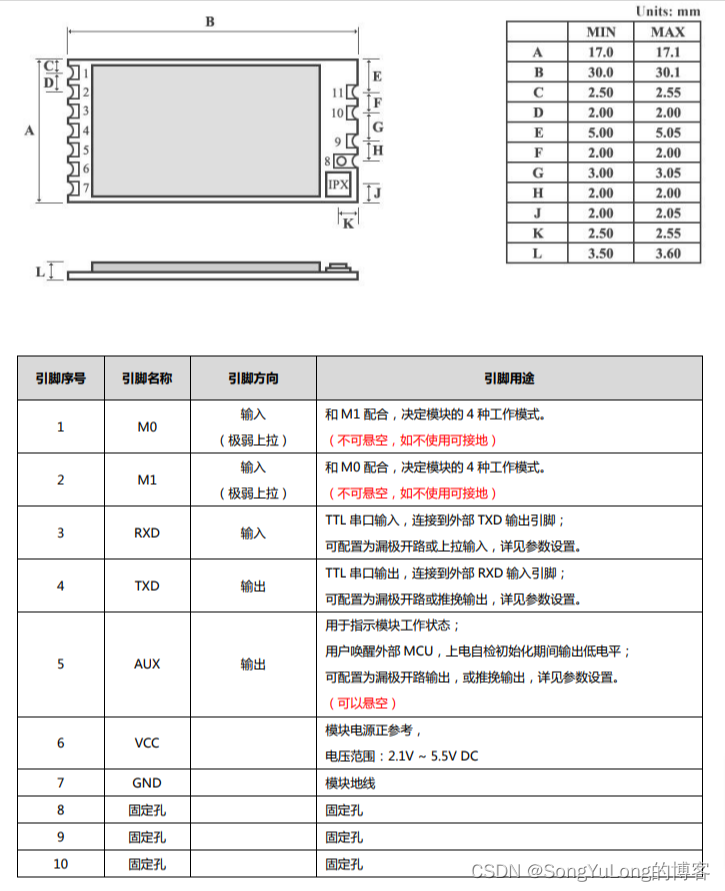
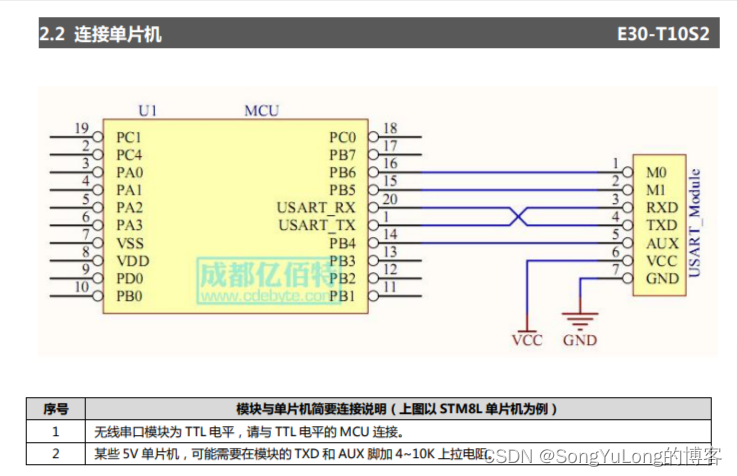
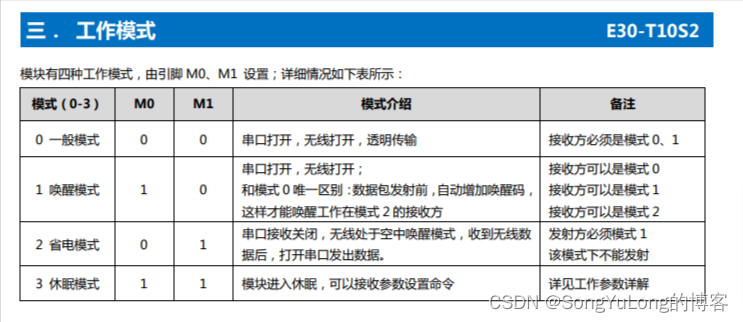
简单数据透传Demo
from machine import Pin,UART import utime class WIRELESS_UART: def __init__(self, uart, m0, m1, aux=-1, mode=0): self.uart = uart self.mode = mode self.m0 = Pin(m0, Pin.OUT) self.m1 = Pin(m1, Pin.OUT) if aux >= 0: self.aux = Pin(aux, Pin.IN) self.set_mode(mode) self.rxbuf = bytes() def set_mode(self, mode): self.mode = mode if self.mode == 0: self.m0.value(0) self.m1.value(0) elif self.mode == 1: self.m0.value(1) self.m1.value(0) elif self.mode == 2: self.m0.value(0) self.m1.value(1) elif self.mode == 3: self.m0.value(1) self.m1.value(1) else: print('Error mode must be in 0 ~ 3') def write(self, data): self.uart.write(data) def recv_loop(self): while self.uart.any() > 0: #self.rxbuf=self.uart.readline() #self.parse_message(self.rxbuf) c = self.uart.read(1) self.rxbuf += c if c == b'\n': # 一行报文结收结束 print(self.rxbuf) self.uart.write(b'\n'+self.rxbuf) self.rxbuf = b'' uart0 = UART(0, baudrate=9600, bits=8, parity=None, stop=1, tx=Pin(16), rx=Pin(17) ) wuart = WIRELESS_UART(uart=uart0, m0=19, m1=18, aux=-1, mode=0) wuart.set_mode(0) # mode:0,1,2,3 while True: #wuart.write(b'good') wuart.recv_loop() utime.sleep_ms(10)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
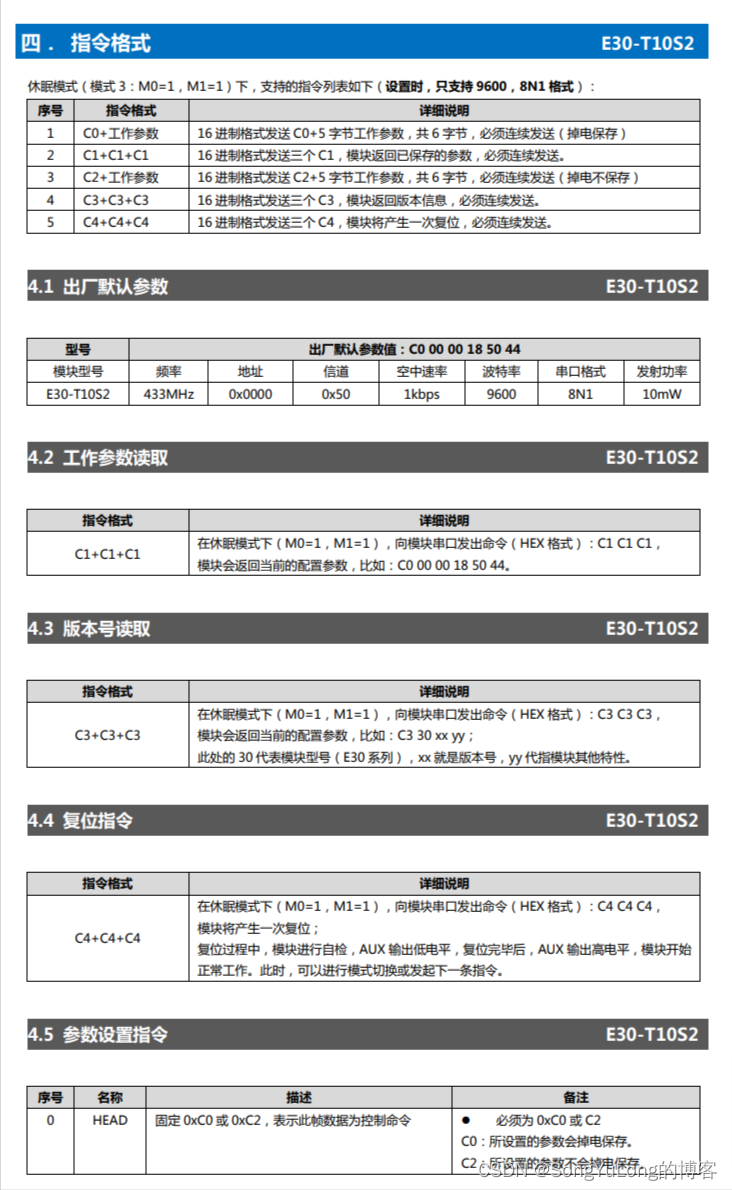
支持参数配置Demo
from machine import Pin,UART import utime import struct CMD_READ_CONFIG = bytes([0xC1,0xC1,0xC1]) # 读取模块配置参数,比如:C0 00 00 18 50 44。 CMD_READ_INFO = bytes([0xC3,0xC3,0xC3]) # 读取模块版本信息,比如:C3 30 xx yy;30表示E30系列, CMD_RESET = bytes([0xC4,0xC4,0xC4]) # 复位模块 # 串口校验模式 UART_8N1 = 0x00<<6 UART_8O1 = 0x01<<6 UART_8E1 = 0x02<<6 # 串口波特率 BAUDRATE_1200 = 0x00<<3 BAUDRATE_2400 = 0x01<<3 BAUDRATE_4800 = 0x02<<3 BAUDRATE_9600 = 0x03<<3 BAUDRATE_19200 = 0x04<<3 BAUDRATE_38400 = 0x05<<3 BAUDRATE_57600 = 0x06<<3 BAUDRATE_115200 = 0x07<<3 # 无线空中速率 AIRRATE_1KBPS = 0x00 AIRRATE_2KBPS = 0x01 AIRRATE_5KBPS = 0x02 AIRRATE_8KBPS = 0x03 AIRRATE_10KBPS = 0x04 AIRRATE_15KBPS = 0x05 AIRRATE_20KBPS = 0x06 AIRRATE_25KBPS = 0x07 # 定点发生使能 TRS_MODE = 0x00<<7 FIX_MODE = 0x01<<7 # IO驱动 IO_PPO = 0x01<<6 # Push-Pull Output 推挽输出 IO_ODO = 0x00<<6 # Open Drain Output 开漏输出 WAKEUP_250MS = 0x00<<3 WAKEUP_500MS = 0x01<<3 WAKEUP_750MS = 0x02<<3 WAKEUP_1000MS = 0x03<<3 WAKEUP_1250MS = 0x04<<3 WAKEUP_1500MS = 0x05<<3 WAKEUP_1750MS = 0x06<<3 WAKEUP_2000MS = 0x07<<3 # FEC开关 FEC_ON = 0x01<<2 FEC_OFF = 0x00<<2 # 发射功率 POWER_10dBm = 0x00 POWER_9dBm = 0x01 POWER_8dBm = 0x02 POWER_7dBm = 0x03 class WIRELESS_UART: def __init__(self, uart, m0, m1, aux=-1, mode=0): self.uart = uart self.mode = mode self.m0 = Pin(m0, Pin.OUT) self.m1 = Pin(m1, Pin.OUT) if aux >= 0: self.aux = Pin(aux, Pin.IN) self.HEAD = 0xC2 # 0xC0:设置参数到ROM, 0xC2:设置参数到RAM self.ADDH = 0x00 # 地址高字节 00H-FFH self.ADDL = 0x00 # 地址低字节 00H-FFH self.SPED = UART_8N1|BAUDRATE_9600|AIRRATE_1KBPS # 速率参数 self.CHAN = 0xFF # 通信频率 信道 self.OPTION = TRS_MODE|IO_PPO|WAKEUP_250MS|FEC_ON|POWER_10dBm #选项 print(self.SPED, self.OPTION) self.set_mode(mode) self.rxbuf = bytes() self.recv = bytes() def send_configurate(self, save=False): mode = self.mode self.set_mode(3) utime.sleep_ms(100) if save==True: self.HEAD = 0xC0 else: self.HEAD = 0xC2 cmd = bytearray([self.HEAD, self.ADDH, self.ADDL, self.SPED, self.CHAN, self.OPTION]) print(cmd) self.uart.write(cmd) utime.sleep_ms(200) self.set_mode(mode) def set_mode(self, mode): self.mode = mode # mode_0: 一般模式 # mode_1: 唤醒模式 # mode_2: 省电模式 # mode_3: 休眠模式 if self.mode == 0: self.m0.value(0) self.m1.value(0) elif self.mode == 1: self.m0.value(1) self.m1.value(0) elif self.mode == 2: self.m0.value(0) self.m1.value(1) elif self.mode == 3: self.m0.value(1) self.m1.value(1) else: print('Error mode must be in 0 ~ 3') def read_configurate(self): mode = self.mode self.set_mode(3) self.uart.write(CMD_READ_CONFIG) utime.sleep_ms(200) recv = bytes() while self.uart.any(): recv += self.uart.read(1) self.set_mode(mode) print(len(recv)) if len(recv)>=6: umode = (recv[3]&0xC0)>>6 # [7,6] 串口校验位模式 ubsp = (recv[3]&0x38)>>3 # [5,4,3] TTL串口速率(bps) wbps = (recv[3]&0x07) # [2,1,0] 无线空中速率(bps) freq = 425+(int(recv[4]) * 0.1) # 通信频率 425M+CHAN*0.1M 00H-FFH,对应425~455MHz fcc = (recv[5]&0x04)>>2 #[2] FCC开关 0:关闭FCC, 1:打开FCC dBm = (recv[5]&0x03) #[1,0] 发射功率 print('----------Configurate-------------') print('-- head {:#X}'.format(recv[0])) print('-- ADDH {:#X}'.format(recv[1])) print('-- ADDL {:#X}'.format(recv[2])) print('-- SPEED:{:x}'.format(umode)) print('-- ubsp:{:x}'.format(ubsp)) print('-- wbps:{:x}'.format(wbps)) print('-- ch:{:x}'.format(recv[4])) print('-- freq:{:d}MHz'.format(freq)) print('-- option:{:x}'.format(recv[5])) print('-- FCC:{:d}'.format(fcc)) print('-- dBm:{:d}dBm'.format(dBm)) else: print('error configuarte head') return recv def write(self, data): self.uart.write(data) def recv_loop(self): while self.uart.any() > 0: #self.rxbuf=self.uart.readline() #self.parse_message(self.rxbuf) c = self.uart.read(1) self.rxbuf += c #print(c) if c == b'\n': # 一行报文结收结束 print(self.rxbuf) self.uart.write(b'\n'+self.rxbuf) self.rxbuf = b'' uart0 = UART(0, baudrate=9600, bits=8, parity=None, stop=1, tx=Pin(16), rx=Pin(17) ) wuart = WIRELESS_UART(uart=uart0, m0=19, m1=18, aux=-1, mode=0) wuart.set_mode(0) wuart.send_configurate(False) utime.sleep(1) ret = wuart.read_configurate() for r in ret: print(r) utime.sleep(1) while True: #wuart.write(b'good') wuart.recv_loop() utime.sleep_ms(100)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
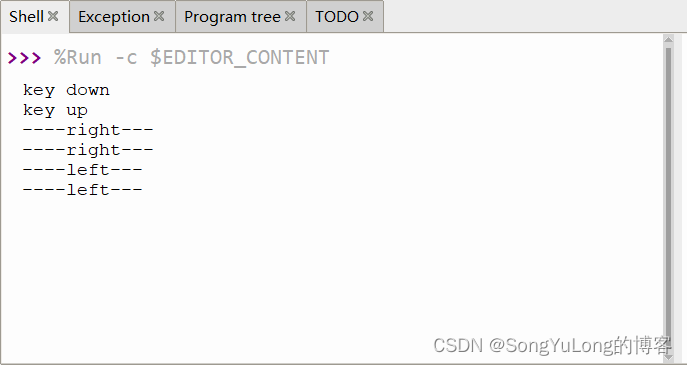
旋转编码器

from machine import Pin import utime key = Pin(18, Pin.IN) rotary_clk = Pin(19, Pin.IN) rotary_dt = Pin(20, Pin.IN) def rotary_encoder_task(pin): # 当CLK下降沿时,DT是低电平:顺时针旋转,DT是高电平:逆时针旋转 if rotary_dt.value() == 0: print('----right---') else: print('----left---') rotary_clk.irq(trigger=Pin.IRQ_FALLING, handler=rotary_encoder_task) # 当按键按下或抬起时会有抖动,这里增加个变量以便过滤掉干扰脉冲 key_pressed = False def key_task(pin): global key_pressed if key_pressed == False: if key.value()==0: key_pressed = True print('key down') elif key_pressed == True: if key.value()==1: key_pressed = False print('key up') key.irq(trigger=Pin.IRQ_FALLING|Pin.IRQ_RISING, handler=key_task) while True: utime.sleep(0.5)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
步进电机

2相4线步进电机
from machine import Pin,PWM import machine import utime delay_ms = 2 # 四个引脚各一根控制线:A~H表示各线时序 # A B C D E F G H # A+ 1 1 0 0 0 0 0 1 # A- 0 0 0 1 1 1 0 0 # B+ 0 1 1 1 0 0 0 0 # B- 0 0 0 0 0 1 1 1 AP = Pin(32, Pin.OUT) BP = Pin(33, Pin.OUT) AN = Pin(25, Pin.OUT) BN = Pin(26, Pin.OUT) AP.value(0) BP.value(0) AN.value(0) BN.value(0) def motor_step(step=0, delay_ms=1): if step == 0: # A S1: 1 0 0 0 AP.value(1) AN.value(0) BP.value(0) BN.value(0) elif step == 1: # B S2: 1 0 1 0 AP.value(1) AN.value(0) BP.value(1) BN.value(0) elif step == 2: # C S3: 0 0 1 0 AP.value(0) AN.value(0) BP.value(1) BN.value(0) elif step == 3: # D S4: 0 1 1 0 AP.value(0) AN.value(1) BP.value(1) BN.value(0) elif step == 4: # E S5: 0 1 0 0 AP.value(0) AN.value(1) BP.value(0) BN.value(0) elif step == 5: # F S6: 0 1 0 1 AP.value(0) AN.value(1) BP.value(0) BN.value(1) elif step == 6: # G S7: 0 0 0 1 AP.value(0) AN.value(0) BP.value(0) BN.value(1) elif step == 7: # H S8: 1 0 0 1 AP.value(1) AN.value(0) BP.value(0) BN.value(1) utime.sleep_ms(delay_ms) def motor_control(dir=0, speed=1): if dir == 0: # 逆时针 旋转 step 7 ~ 0 for i in range(0, 7): motor_step(7-i, speed) else: # 逆时针 旋转 step 0 ~ 7 for i in range(0, 7): motor_step(i, speed) while True: #motor_control(0, 2) # 逆时针 motor_control(1, 2) # 顺时针
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
4相5线步进电机
from machine import Pin,PWM import machine import utime class step_motor(): ''' 引脚线序:A~H时序,4相5线共阳接法,8拍控制时序 +-------------------------------------------------------+ | | A | B | C | D | E | F | G | H | +-------------------------------------------------------| |COM + + + + + + + + | | A 0 0 1 1 1 1 1 0 | | B 1 0 0 0 1 1 1 1 | | C 1 1 1 0 0 0 1 1 | | D 1 1 1 1 1 0 0 0 | +-------------------------------------------------------+ ''' def __init__(self, a, b, c, d): self._a = Pin(a, Pin.OUT) self._b = Pin(b, Pin.OUT) self._c = Pin(c, Pin.OUT) self._d = Pin(d, Pin.OUT) def one_step(self, step=0, delay_ms=1): if step == 0: # A S1: 0 1 1 1 self._a.value(0) self._b.value(1) self._c.value(1) self._d.value(1) elif step == 1: # B S2: 0 0 1 1 self._a.value(0) self._b.value(0) self._c.value(1) self._d.value(1) elif step == 2: # C S3: 1 0 1 1 self._a.value(1) self._b.value(0) self._c.value(1) self._d.value(1) elif step == 3: # D S4: 1 0 0 1 self._a.value(1) self._b.value(0) self._c.value(0) self._d.value(1) elif step == 4: # E S5: 1 1 0 1 self._a.value(1) self._b.value(1) self._c.value(0) self._d.value(1) elif step == 5: # F S6: 1 1 0 0 self._a.value(1) self._b.value(1) self._c.value(0) self._d.value(0) elif step == 6: # G S7: 1 1 1 0 self._a.value(1) self._b.value(1) self._c.value(1) self._d.value(0) elif step == 7: # H S8: 0 1 1 0 self._a.value(0) self._b.value(1) self._c.value(1) self._d.value(0) utime.sleep_ms(delay_ms) def motor_control(self, dir=0, speed=1): if dir == 0: # 逆时针 旋转 step 0 ~ 7 for i in range(0, 7): self.one_step(i, speed) else: # 逆时针 旋转 step 7 ~ 0 for i in range(0, 7): self.one_step(7-i, speed) def go_steps(self, dir=0, steps=0, speed=1): for i in range(steps): if dir == 0: self.one_step(7-(i%8), speed) else: self.one_step((i%8), speed) motor = step_motor(0, 2, 15, 13) # 此电机转速比 1:64 # 步距角度:5.625/64=0.087890625度 # 360度/0.087890625度=4096个脉冲 # motor_control执行一次产生8个脉冲,4096/8=512 # motor_control执行512次,电机输出刚好旋转一圈360角度 for i in range(512*5): # motor.motor_control(1, 2) # 走4096步,电机输出转一圈 motor.go_steps(1, 4096, 2) while True: utime.sleep(1) # motor.motor_control(0, 2) # motor.motor_control(1, 1)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
INA219电流/电源监测模块
INA219 是一款具备 I2C 或 SMBUS 兼容接口的分流器和功率监测计。该器件监测分流器电压降和总线电源电压,转换次数和滤波选项可通过编程设定。可编程校准值与内部乘法器相结合,支持直接读取电流值(单位:安培)。通过附加乘法寄存器可计算功率(单位:瓦)。I2C 或 SMBUS 兼容接口 具有 16 个可编程地址。INA219 可在 0V 至 26V 范围内感测总线中的分压。该器件由 3V 至 5.5V 单电源供电,电源的最大流耗为1mA。INA219 的工作温度范围为 -40°C 至 125°C。
特性:
- 监测电压范围:0V 至 26V
- 可监测电流、电压、和功率
- 16 个可编程地址
- 高精度:整个温度范围内的精度为 0.5%(最大
值)(INA219B) - 滤波选项
- 校准寄存器
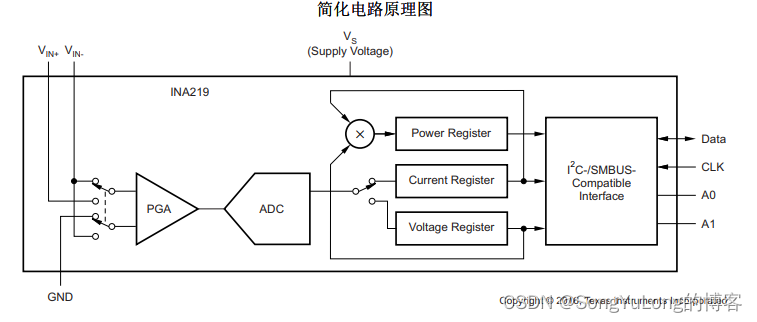
Demo
from machine import Pin,UART,ADC,I2C import machine import utime import _thread import struct import math import ws2812b from ssd1306 import SSD1306_I2C,SSD1306_SPI import framebuf import array import utime from ina219 import INA219,DeviceRangeError i2c0 = I2C(0, sda=Pin(0), scl=Pin(1),freq=400000) devlist = i2c0.scan() print("I2C0 Address List:",devlist) for dev in devlist: print(hex(dev)) i2c1 = I2C(1, sda=Pin(6), scl=Pin(7),freq=400000) devlist = i2c1.scan() print("I2C1 Address List:",devlist) for dev in devlist: print(hex(dev)) # Raspberry Pi logo as 32x32 bytearray buffer = bytearray(b"\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00|?\x00\x01\x86@\x80\x01\x01\x80\x80\x01\x11\x88\x80\x01\x05\xa0\x80\x00\x83\xc1\x00\x00C\xe3\x00\x00~\xfc\x00\x00L'\x00\x00\x9c\x11\x00\x00\xbf\xfd\x00\x00\xe1\x87\x00\x01\xc1\x83\x80\x02A\x82@\x02A\x82@\x02\xc1\xc2@\x02\xf6>\xc0\x01\xfc=\x80\x01\x18\x18\x80\x01\x88\x10\x80\x00\x8c!\x00\x00\x87\xf1\x00\x00\x7f\xf6\x00\x008\x1c\x00\x00\x0c \x00\x00\x03\xc0\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00") # Load the raspberry pi logo into the framebuffer (the image is 32x32) fb = framebuf.FrameBuffer(buffer, 32, 32, framebuf.MONO_HLSB) WIDTH = 128 HEIGHT = 64 try: oled = SSD1306_I2C(WIDTH,HEIGHT,i2c0) except: pass oled.fill(0) # oled.blit(fb, (128-32)//2, (64-32)//2) #oled.text('RaspberryPi Pico', 0, 0) #oled.hline(0,12, 128, 1) #oled.blit(fb, (128-32), 15) #oled.show() # 分路电阻值,单位为欧姆(强制) SHUNT_OHMS = 0.1 # 以安培为单位的最大预期电流(可选) MAX_EXPECTED_AMPS = 3 #1 # 电阻值,通讯协议,电流值 ina = INA219(SHUNT_OHMS, i2c0, MAX_EXPECTED_AMPS) # 配置和校准INA219的测量方式OUT输出12位 #ina.configure(ina.RANGE_32V) ina.configure(voltage_range=ina.RANGE_32V, gain=ina.GAIN_AUTO, bus_adc=ina.ADC_16SAMP, shunt_adc=ina.ADC_16SAMP) while True: voltage = ina.voltage() current = ina.current() power = ina.power() shunt = ina.shunt_voltage() print("电压:", voltage, "V") print("电流:", current, "mA") print("功率:", power, "mW") print("分压:", shunt, "mV") oled.fill(0) oled.text("Voltage:{:.2f}V".format(voltage), 0, 0) oled.text("Current:{:.2f}mA".format(current), 0, 12) oled.text("Power:{:.2f}mW".format(power), 0, 12*2) oled.text("shunt:{:.2f}mV".format(shunt), 0, 12*3) oled.show() utime.sleep(0.2)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
驱动库文件:ina219.py
"""MicroPython library for the INA219 sensor. This library supports the INA219 sensor from Texas Instruments with MicroPython using the I2C bus. """ import utime from math import trunc from micropython import const class INA219: """Provides all the functionality to interact with the INA219 sensor.""" RANGE_16V = const(0) # Range 0-16 volts RANGE_32V = const(1) # Range 0-32 volts GAIN_1_40MV = const(0) # Maximum shunt voltage 40mV GAIN_2_80MV = const(1) # Maximum shunt voltage 80mV GAIN_4_160MV = const(2) # Maximum shunt voltage 160mV GAIN_8_320MV = const(3) # Maximum shunt voltage 320mV GAIN_AUTO = const(-1) # Determine gain automatically ADC_9BIT = const(0) # 9-bit conversion time 84us. ADC_10BIT = const(1) # 10-bit conversion time 148us. ADC_11BIT = const(2) # 11-bit conversion time 2766us. ADC_12BIT = const(3) # 12-bit conversion time 532us. ADC_2SAMP = const(9) # 2 samples at 12-bit, conversion time 1.06ms. ADC_4SAMP = const(10) # 4 samples at 12-bit, conversion time 2.13ms. ADC_8SAMP = const(11) # 8 samples at 12-bit, conversion time 4.26ms. ADC_16SAMP = const(12) # 16 samples at 12-bit,conversion time 8.51ms ADC_32SAMP = const(13) # 32 samples at 12-bit, conversion time 17.02ms. ADC_64SAMP = const(14) # 64 samples at 12-bit, conversion time 34.05ms. ADC_128SAMP = const(15) # 128 samples at 12-bit, conversion time 68.10ms. __ADC_CONVERSION = { ADC_9BIT: "9-bit", ADC_10BIT: "10-bit", ADC_11BIT: "11-bit", ADC_12BIT: "12-bit", ADC_2SAMP: "12-bit, 2 samples", ADC_4SAMP: "12-bit, 4 samples", ADC_8SAMP: "12-bit, 8 samples", ADC_16SAMP: "12-bit, 16 samples", ADC_32SAMP: "12-bit, 32 samples", ADC_64SAMP: "12-bit, 64 samples", ADC_128SAMP: "12-bit, 128 samples" } __ADDRESS = 0x40 __REG_CONFIG = 0x00 __REG_SHUNTVOLTAGE = 0x01 __REG_BUSVOLTAGE = 0x02 __REG_POWER = 0x03 __REG_CURRENT = 0x04 __REG_CALIBRATION = 0x05 __RST = 15 __BRNG = 13 __PG1 = 12 __PG0 = 11 __BADC4 = 10 __BADC3 = 9 __BADC2 = 8 __BADC1 = 7 __SADC4 = 6 __SADC3 = 5 __SADC2 = 4 __SADC1 = 3 __MODE3 = 2 __MODE2 = 1 __MODE1 = 0 __OVF = 1 __CNVR = 2 __BUS_RANGE = [16, 32] __GAIN_VOLTS = [0.04, 0.08, 0.16, 0.32] __CONT_SH_BUS = 7 __AMP_ERR_MSG = ('Expected current %.3fA is greater ' 'than max possible current %.3fA') __RNG_ERR_MSG = ('Expected amps %.2fA, out of range, use a lower ' 'value shunt resistor') __VOLT_ERR_MSG = ('Invalid voltage range, must be one of: ' 'RANGE_16V, RANGE_32V') __LOG_FORMAT = '%(asctime)s - %(levelname)s - INA219 %(message)s' __LOG_MSG_1 = ('shunt ohms: %.3f, bus max volts: %d, ' 'shunt volts max: %.2f%s, ' 'bus ADC: %s, shunt ADC: %s') __LOG_MSG_2 = ('calibrate called with: bus max volts: %dV, ' 'max shunt volts: %.2fV%s') __LOG_MSG_3 = ('Current overflow detected - ' 'attempting to increase gain') __SHUNT_MILLIVOLTS_LSB = 0.01 # 10uV __BUS_MILLIVOLTS_LSB = 4 # 4mV __CALIBRATION_FACTOR = 0.04096 # Max value supported value (65534 decimal) of the calibration register # (D0 bit is always zero, p31 of spec) __MAX_CALIBRATION_VALUE = 0xFFFE # In the spec (p17) the current LSB factor for the minimum LSB is # documented as 32767, but a larger value (100.1% of 32767) is used # to guarantee that current overflow can always be detected. __CURRENT_LSB_FACTOR = 32800 def __init__(self, shunt_ohms, i2c, max_expected_amps=None, address=__ADDRESS): """Construct the class. At a minimum pass in the resistance of the shunt resistor and I2C interface to which the sensor is connected. Arguments: shunt_ohms -- value of shunt resistor in Ohms (mandatory). i2c -- an instance of the I2C class from the *machine* module, either I2C(1) or I2C(2) (mandatory). max_expected_amps -- the maximum expected current in Amps (optional). address -- the I2C address of the INA219, defaults to *0x40* (optional). log_level -- set to logging.DEBUG to see detailed calibration calculations (optional). """ self._i2c = i2c self._address = address self._shunt_ohms = shunt_ohms self._max_expected_amps = max_expected_amps self._min_device_current_lsb = self._calculate_min_current_lsb() self._gain = None self._auto_gain_enabled = False def configure(self, voltage_range=RANGE_32V, gain=GAIN_AUTO, bus_adc=ADC_12BIT, shunt_adc=ADC_12BIT): """Configure and calibrate how the INA219 will take measurements. Arguments: voltage_range -- The full scale voltage range, this is either 16V or 32V represented by one of the following constants; RANGE_16V, RANGE_32V (default). gain -- The gain which controls the maximum range of the shunt voltage represented by one of the following constants; GAIN_1_40MV, GAIN_2_80MV, GAIN_4_160MV, GAIN_8_320MV, GAIN_AUTO (default). bus_adc -- The bus ADC resolution (9, 10, 11, or 12-bit) or set the number of samples used when averaging results represent by one of the following constants; ADC_9BIT, ADC_10BIT, ADC_11BIT, ADC_12BIT (default), ADC_2SAMP, ADC_4SAMP, ADC_8SAMP, ADC_16SAMP, ADC_32SAMP, ADC_64SAMP, ADC_128SAMP shunt_adc -- The shunt ADC resolution (9, 10, 11, or 12-bit) or set the number of samples used when averaging results represent by one of the following constants; ADC_9BIT, ADC_10BIT, ADC_11BIT, ADC_12BIT (default), ADC_2SAMP, ADC_4SAMP, ADC_8SAMP, ADC_16SAMP, ADC_32SAMP, ADC_64SAMP, ADC_128SAMP """ self.__validate_voltage_range(voltage_range) self._voltage_range = voltage_range if self._max_expected_amps is not None: if gain == self.GAIN_AUTO: self._auto_gain_enabled = True self._gain = self._determine_gain(self._max_expected_amps) else: self._gain = gain else: if gain != self.GAIN_AUTO: self._gain = gain else: self._auto_gain_enabled = True self._gain = self.GAIN_1_40MV self._calibrate( self.__BUS_RANGE[voltage_range], self.__GAIN_VOLTS[self._gain], self._max_expected_amps) self._configure(voltage_range, self._gain, bus_adc, shunt_adc) def voltage(self): """Return the bus voltage in volts.""" value = self._voltage_register() return float(value) * self.__BUS_MILLIVOLTS_LSB / 1000 def supply_voltage(self): """Return the bus supply voltage in volts. This is the sum of the bus voltage and shunt voltage. A DeviceRangeError exception is thrown if current overflow occurs. """ return self.voltage() + (float(self.shunt_voltage()) / 1000) def current(self): """Return the bus current in milliamps. A DeviceRangeError exception is thrown if current overflow occurs. """ self._handle_current_overflow() return self._current_register() * self._current_lsb * 1000 def power(self): """Return the bus power consumption in milliwatts. A DeviceRangeError exception is thrown if current overflow occurs. """ self._handle_current_overflow() return self._power_register() * self._power_lsb * 1000 def shunt_voltage(self): """Return the shunt voltage in millivolts. A DeviceRangeError exception is thrown if current overflow occurs. """ self._handle_current_overflow() return self._shunt_voltage_register() * self.__SHUNT_MILLIVOLTS_LSB def sleep(self): """Put the INA219 into power down mode.""" configuration = self._read_configuration() self._configuration_register(configuration & 0xFFF8) def wake(self): """Wake the INA219 from power down mode.""" configuration = self._read_configuration() self._configuration_register(configuration | 0x0007) # 40us delay to recover from powerdown (p14 of spec) utime.sleep_us(40) def current_overflow(self): """Return true if the sensor has detect current overflow. In this case the current and power values are invalid. """ return self._has_current_overflow() def reset(self): """Reset the INA219 to its default configuration.""" self._configuration_register(1 << self.__RST) def _handle_current_overflow(self): if self._auto_gain_enabled: while self._has_current_overflow(): self._increase_gain() else: if self._has_current_overflow(): raise DeviceRangeError(self.__GAIN_VOLTS[self._gain]) def _determine_gain(self, max_expected_amps): shunt_v = max_expected_amps * self._shunt_ohms if shunt_v > self.__GAIN_VOLTS[3]: raise ValueError(self.__RNG_ERR_MSG % max_expected_amps) gain = min(v for v in self.__GAIN_VOLTS if v > shunt_v) return self.__GAIN_VOLTS.index(gain) def _increase_gain(self): gain = self._read_gain() if gain < len(self.__GAIN_VOLTS) - 1: gain = gain + 1 self._calibrate(self.__BUS_RANGE[self._voltage_range], self.__GAIN_VOLTS[gain]) self._configure_gain(gain) # 1ms delay required for new configuration to take effect, # otherwise invalid current/power readings can occur. utime.sleep_ms(1) else: raise DeviceRangeError(self.__GAIN_VOLTS[gain], True) def _configure(self, voltage_range, gain, bus_adc, shunt_adc): configuration = ( voltage_range << self.__BRNG | gain << self.__PG0 | bus_adc << self.__BADC1 | shunt_adc << self.__SADC1 | self.__CONT_SH_BUS) self._configuration_register(configuration) def _calibrate(self, bus_volts_max, shunt_volts_max, max_expected_amps=None): max_possible_amps = shunt_volts_max / self._shunt_ohms self._current_lsb = \ self._determine_current_lsb(max_expected_amps, max_possible_amps) self._power_lsb = self._current_lsb * 20 max_current = self._current_lsb * 32767 max_shunt_voltage = max_current * self._shunt_ohms calibration = trunc(self.__CALIBRATION_FACTOR / (self._current_lsb * self._shunt_ohms)) self._calibration_register(calibration) def _determine_current_lsb(self, max_expected_amps, max_possible_amps): if max_expected_amps is not None: if max_expected_amps > round(max_possible_amps, 3): raise ValueError(self.__AMP_ERR_MSG % (max_expected_amps, max_possible_amps)) if max_expected_amps < max_possible_amps: current_lsb = max_expected_amps / self.__CURRENT_LSB_FACTOR else: current_lsb = max_possible_amps / self.__CURRENT_LSB_FACTOR else: current_lsb = max_possible_amps / self.__CURRENT_LSB_FACTOR if current_lsb < self._min_device_current_lsb: current_lsb = self._min_device_current_lsb return current_lsb def _configuration_register(self, register_value): self.__write_register(self.__REG_CONFIG, register_value) def _read_configuration(self): return self.__read_register(self.__REG_CONFIG) def _calculate_min_current_lsb(self): return self.__CALIBRATION_FACTOR / \ (self._shunt_ohms * self.__MAX_CALIBRATION_VALUE) def _read_gain(self): configuration = self._read_configuration() gain = (configuration & 0x1800) >> self.__PG0 return gain def _configure_gain(self, gain): configuration = self._read_configuration() configuration = configuration & 0xE7FF self._configuration_register(configuration | (gain << self.__PG0)) self._gain = gain def _calibration_register(self, register_value): self.__write_register(self.__REG_CALIBRATION, register_value) def _has_current_overflow(self): ovf = self._read_voltage_register() & self.__OVF return (ovf == 1) def _voltage_register(self): register_value = self._read_voltage_register() return register_value >> 3 def _read_voltage_register(self): return self.__read_register(self.__REG_BUSVOLTAGE) def _current_register(self): return self.__read_register(self.__REG_CURRENT, True) def _shunt_voltage_register(self): return self.__read_register(self.__REG_SHUNTVOLTAGE, True) def _power_register(self): return self.__read_register(self.__REG_POWER) def __validate_voltage_range(self, voltage_range): if voltage_range > len(self.__BUS_RANGE) - 1: raise ValueError(self.__VOLT_ERR_MSG) def __write_register(self, register, register_value): self.__log_register_operation("write", register, register_value) register_bytes = self.__to_bytes(register_value) self._i2c.writeto_mem(self._address, register, register_bytes) def __to_bytes(self, register_value): return bytearray([(register_value >> 8) & 0xFF, register_value & 0xFF]) def __read_register(self, register, negative_value_supported=False): register_bytes = self._i2c.readfrom_mem(self._address, register, 2) register_value = int.from_bytes(register_bytes, 'big') if negative_value_supported: # Two's compliment if register_value > 32767: register_value -= 65536 self.__log_register_operation("read", register, register_value) return register_value def __log_register_operation(self, msg, register, value): # performance optimisation #if logging._level == logging.DEBUG: # binary = '{0:#018b}'.format(value) # self._log.debug("%s register 0x%02x: 0x%04x %s", # msg, register, value, binary) pass def __max_expected_amps_to_string(self, max_expected_amps): if max_expected_amps is None: return '' else: return ', max expected amps: %.3fA' % max_expected_amps class DeviceRangeError(Exception): """This exception is throw to prevent invalid readings. Invalid readings occur When the current is greater than allowed given calibration of the device. """ __DEV_RNG_ERR = ('Current out of range (overflow), ' 'for gain %.2fV') def __init__(self, gain_volts, device_max=False): """Construct the class.""" msg = self.__DEV_RNG_ERR % gain_volts if device_max: msg = msg + ', device limit reached' super(DeviceRangeError, self).__init__(msg) self.gain_volts = gain_volts self.device_limit_reached = device_max
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
- 298
- 299
- 300
- 301
- 302
- 303
- 304
- 305
- 306
- 307
- 308
- 309
- 310
- 311
- 312
- 313
- 314
- 315
- 316
- 317
- 318
- 319
- 320
- 321
- 322
- 323
- 324
- 325
- 326
- 327
- 328
- 329
- 330
- 331
- 332
- 333
- 334
- 335
- 336
- 337
- 338
- 339
- 340
- 341
- 342
- 343
- 344
- 345
- 346
- 347
- 348
- 349
- 350
- 351
- 352
- 353
- 354
- 355
- 356
- 357
- 358
- 359
- 360
- 361
- 362
- 363
- 364
- 365
- 366
- 367
- 368
- 369
- 370
- 371
- 372
- 373
- 374
- 375
- 376
- 377
- 378
- 379
- 380
- 381
- 382
- 383
- 384
- 385
- 386
- 387
- 388
- 389
- 390
- 391
- 392
- 393
- 394
- 395
- 396
- 397
- 398
- 399
- 400
- 401
- 402
- 403
- 404
- 405
- 406
- 407
- 408
- 409
- 410
模块接线示意图:
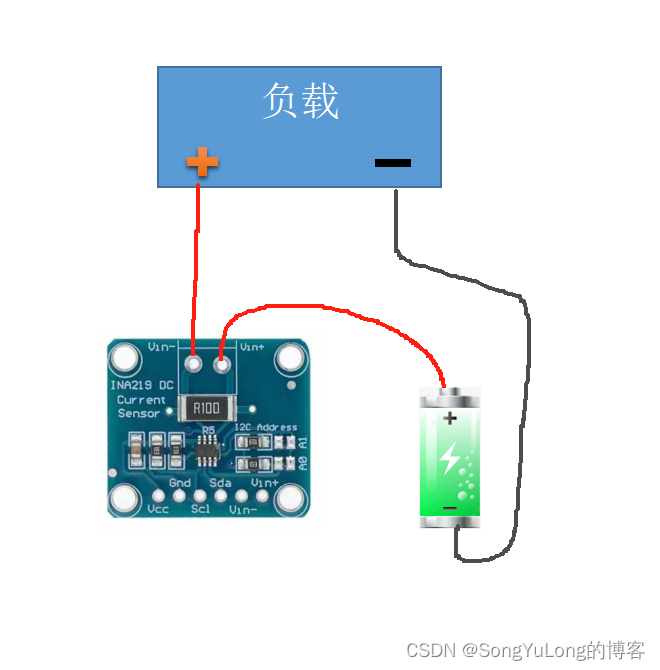
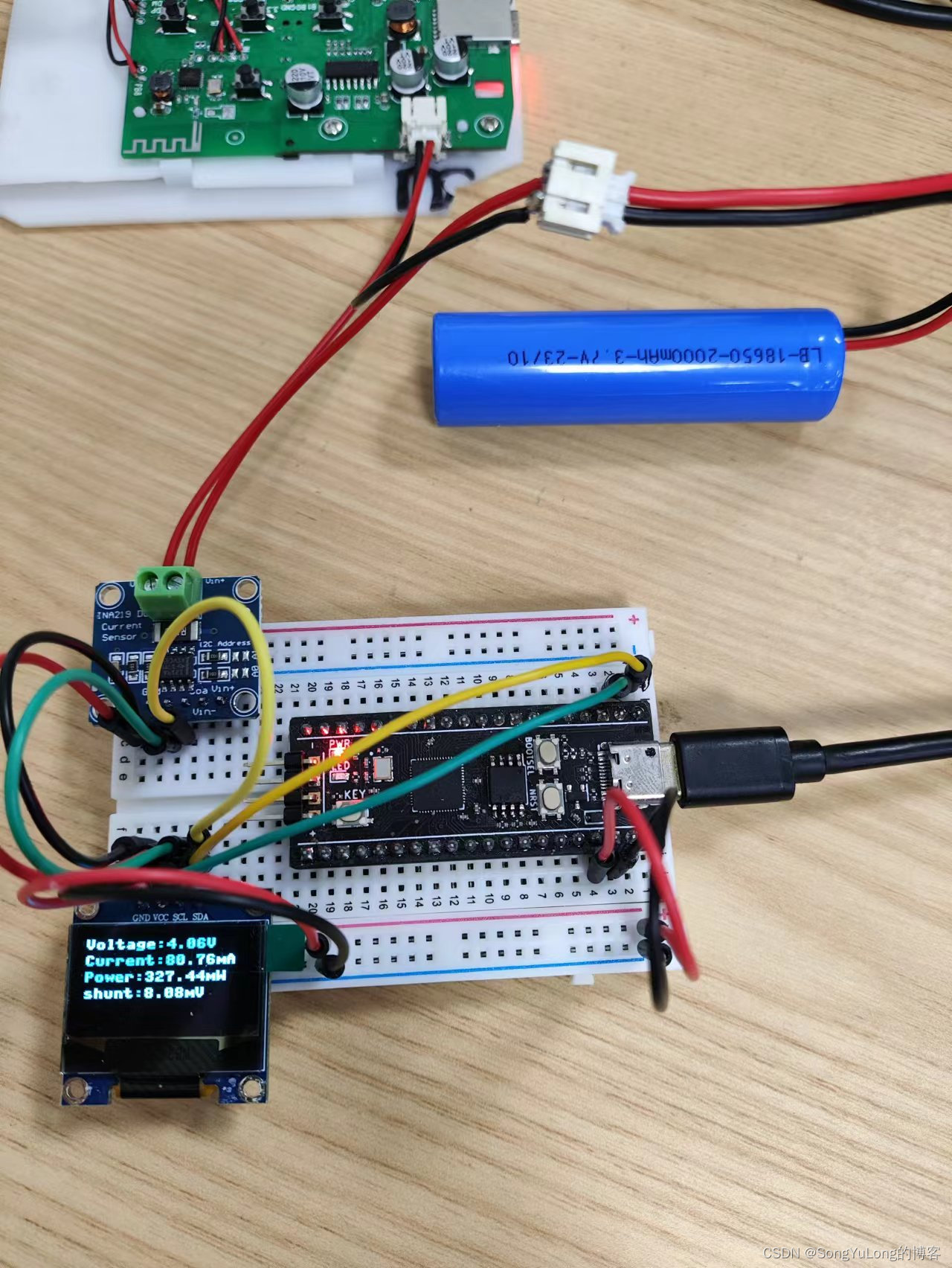
PJ7620手势识别传感器
PAJ7620是一款通过红外线感应手势的传感器模块,可以实现识别9种不同的手势动作,包括向上、向下、向左、向右、向前、向后、左旋转、有旋转、波动等。
演示Demo:
from machine import Pin,UART,ADC,I2C import machine import utime import _thread import struct import math from ssd1306 import SSD1306_I2C,SSD1306_SPI import framebuf import array from paj7620 import PAJ7620 led = Pin(25, Pin.OUT) i2c0 = I2C(0, sda=Pin(0), scl=Pin(1),freq=400000) devlist = i2c0.scan() print("I2C0 Address List:",devlist) for dev in devlist: print(hex(dev)) # Raspberry Pi logo as 32x32 bytearray buffer = bytearray(b"\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00|?\x00\x01\x86@\x80\x01\x01\x80\x80\x01\x11\x88\x80\x01\x05\xa0\x80\x00\x83\xc1\x00\x00C\xe3\x00\x00~\xfc\x00\x00L'\x00\x00\x9c\x11\x00\x00\xbf\xfd\x00\x00\xe1\x87\x00\x01\xc1\x83\x80\x02A\x82@\x02A\x82@\x02\xc1\xc2@\x02\xf6>\xc0\x01\xfc=\x80\x01\x18\x18\x80\x01\x88\x10\x80\x00\x8c!\x00\x00\x87\xf1\x00\x00\x7f\xf6\x00\x008\x1c\x00\x00\x0c \x00\x00\x03\xc0\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00") # Load the raspberry pi logo into the framebuffer (the image is 32x32) fb = framebuf.FrameBuffer(buffer, 32, 32, framebuf.MONO_HLSB) WIDTH = 128 HEIGHT = 64 try: oled = SSD1306_I2C(WIDTH,HEIGHT,i2c0) except: print("oled initialize error!") pass oled.fill(0) # 手势传感器 paj = PAJ7620(i2c=i2c0) def PAJ7260(): Gesture = [" ","Forward-前","Backward-后","Right-右","Left-左","Up-上","Down-下","Clockwise-顺","anti-clockwise-逆","Wave-波浪"] print(get) if get != 0: if Gesture[get] == Gesture[9]: led.value(not led.value()) else: led.value(0) def main(): while True: geste = paj.gesture() # geste peut contenir les valeurs suivantes # 0 : nothing # 1 : Forward # 2 : Backward # 3 : Right # 4 : Left # 5 : Up # 6 : Down # 7 : Clockwise # 8 : anti-clockwise # 9 : wave oled.fill(0) # efface l'ecran if geste == 1: oled.text("Forward", 0, 0) elif geste == 2: oled.text("Backward", 0, 0) elif geste == 3: oled.text("Right", 0, 0) elif geste == 4: oled.text("Left", 0, 0) elif geste == 5: oled.text("Up", 0, 0) elif geste == 6: oled.text("Down", 0, 0) elif geste == 7: oled.text("Clockwise", 0, 0) elif geste == 8: oled.text("anti-clockwise", 0, 0) elif geste == 9: oled.text("wave", 0, 0) else: oled.text("Get Gesture", 0, 0) oled.show() utime.sleep(0.5) if __name__ == "__main__": main()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
驱动库:paj7620.py
# # Librairie pour l'utilisation du capteur de geste PAJ7620 # # adaptation pour l'ESP32 du programme Python pour le Raspberry a partir # https://github.com/SeeedDocument/wiki_english/blob/master/docs/Grove-Gesture_v1.0.md # import machine, time # Registres et variables pour le capteur de geste GES_REACTION_TIME = 0.2 # Ajustement du temps de reaction en secondes GES_ENTRY_TIME = 0.5 # si reconnaissance des gestes Avance/Recule, GES_REACTION_TIME doit etre inferieur a GES_ENTRY_TIME(0.5s). BANK0 = 0 BANK1 = 1 PAJ7620_ADDR_BASE = 0x00 # registre de selection de la banque PAJ7620_REGISTER_BANK_SEL = (PAJ7620_ADDR_BASE + 0xEF) # W # adresse i2c PAJ7620_ID = 0x73 # registres BANK 0 PAJ7620_ADDR_SUSPEND_CMD = (PAJ7620_ADDR_BASE + 0x3) # W PAJ7620_ADDR_GES_PS_DET_MASK_0 = (PAJ7620_ADDR_BASE + 0x41) # RW PAJ7620_ADDR_GES_PS_DET_MASK_1 = (PAJ7620_ADDR_BASE + 0x42) # RW PAJ7620_ADDR_GES_PS_DET_FLAG_0 = (PAJ7620_ADDR_BASE + 0x43) # R PAJ7620_ADDR_GES_PS_DET_FLAG_1 = (PAJ7620_ADDR_BASE + 0x44) # R PAJ7620_ADDR_STATE_INDICATOR = (PAJ7620_ADDR_BASE + 0x45) # R PAJ7620_ADDR_PS_HIGH_THRESHOLD = (PAJ7620_ADDR_BASE + 0x69) # RW PAJ7620_ADDR_PS_LOW_THRESHOLD = (PAJ7620_ADDR_BASE + 0x6A) # RW PAJ7620_ADDR_PS_APPROACH_STATE = (PAJ7620_ADDR_BASE + 0x6B) # R PAJ7620_ADDR_PS_RAW_DATA = (PAJ7620_ADDR_BASE + 0x6C) # R # registres BANK 1 PAJ7620_ADDR_PS_GAIN = (PAJ7620_ADDR_BASE + 0x44) # RW PAJ7620_ADDR_IDLE_S1_STEP_0 = (PAJ7620_ADDR_BASE + 0x67) # RW PAJ7620_ADDR_IDLE_S1_STEP_1 = (PAJ7620_ADDR_BASE + 0x68) # RW PAJ7620_ADDR_IDLE_S2_STEP_0 = (PAJ7620_ADDR_BASE + 0x69) # RW PAJ7620_ADDR_IDLE_S2_STEP_1 = (PAJ7620_ADDR_BASE + 0x6A) # RW PAJ7620_ADDR_OP_TO_S1_STEP_0 = (PAJ7620_ADDR_BASE + 0x6B) # RW PAJ7620_ADDR_OP_TO_S1_STEP_1 = (PAJ7620_ADDR_BASE + 0x6C) # RW PAJ7620_ADDR_OP_TO_S2_STEP_0 = (PAJ7620_ADDR_BASE + 0x6D) # RW PAJ7620_ADDR_OP_TO_S2_STEP_1 = (PAJ7620_ADDR_BASE + 0x6E) # RW PAJ7620_ADDR_OPERATION_ENABLE = (PAJ7620_ADDR_BASE + 0x72) # RW # PAJ7620 selection de la banque PAJ7620_BANK0 = 0 PAJ7620_BANK1 = 1 # gestes detectes GES_RIGHT_FLAG = 1<<0 GES_LEFT_FLAG = 1<<1 GES_UP_FLAG = 1<<2 GES_DOWN_FLAG = 1<<3 GES_FORWARD_FLAG = 1<<4 GES_BACKWARD_FLAG = 1<<5 GES_CLOCKWISE_FLAG = 1<<6 GES_COUNT_CLOCKWISE_FLAG = 1<<7 GES_WAVE_FLAG = 1<<0 # retour des gestes NOTHING = 0 FORWARD = 1 BACKWARD = 2 RIGHT = 3 LEFT = 4 UP = 5 DOWN = 6 CLOCKWISE = 7 ANTI_CLOCKWISE = 8 WAVE = 9 # etat initial des differents registres initRegisterArray = ([0xEF,0x00],[0x32,0x29],[0x33,0x01],[0x34,0x00],[0x35,0x01],[0x36,0x00], [0x37,0x07],[0x38,0x17],[0x39,0x06],[0x3A,0x12],[0x3F,0x00],[0x40,0x02],[0x41,0xFF],[0x42,0x01], [0x46,0x2D],[0x47,0x0F],[0x48,0x3C],[0x49,0x00],[0x4A,0x1E],[0x4B,0x00],[0x4C,0x20],[0x4D,0x00], [0x4E,0x1A],[0x4F,0x14],[0x50,0x00],[0x51,0x10],[0x52,0x00],[0x5C,0x02],[0x5D,0x00],[0x5E,0x10], [0x5F,0x3F],[0x60,0x27],[0x61,0x28],[0x62,0x00],[0x63,0x03],[0x64,0xF7],[0x65,0x03],[0x66,0xD9], [0x67,0x03],[0x68,0x01],[0x69,0xC8],[0x6A,0x40],[0x6D,0x04],[0x6E,0x00],[0x6F,0x00],[0x70,0x80], [0x71,0x00],[0x72,0x00],[0x73,0x00],[0x74,0xF0],[0x75,0x00],[0x80,0x42],[0x81,0x44],[0x82,0x04], [0x83,0x20],[0x84,0x20],[0x85,0x00],[0x86,0x10],[0x87,0x00],[0x88,0x05],[0x89,0x18],[0x8A,0x10], [0x8B,0x01],[0x8C,0x37],[0x8D,0x00],[0x8E,0xF0],[0x8F,0x81],[0x90,0x06],[0x91,0x06],[0x92,0x1E], [0x93,0x0D],[0x94,0x0A],[0x95,0x0A],[0x96,0x0C],[0x97,0x05],[0x98,0x0A],[0x99,0x41],[0x9A,0x14], [0x9B,0x0A],[0x9C,0x3F],[0x9D,0x33],[0x9E,0xAE],[0x9F,0xF9],[0xA0,0x48],[0xA1,0x13],[0xA2,0x10], [0xA3,0x08],[0xA4,0x30],[0xA5,0x19],[0xA6,0x10],[0xA7,0x08],[0xA8,0x24],[0xA9,0x04],[0xAA,0x1E], [0xAB,0x1E],[0xCC,0x19],[0xCD,0x0B],[0xCE,0x13],[0xCF,0x64],[0xD0,0x21],[0xD1,0x0F],[0xD2,0x88], [0xE0,0x01],[0xE1,0x04],[0xE2,0x41],[0xE3,0xD6],[0xE4,0x00],[0xE5,0x0C],[0xE6,0x0A],[0xE7,0x00], [0xE8,0x00],[0xE9,0x00],[0xEE,0x07],[0xEF,0x01],[0x00,0x1E],[0x01,0x1E],[0x02,0x0F],[0x03,0x10], [0x04,0x02],[0x05,0x00],[0x06,0xB0],[0x07,0x04],[0x08,0x0D],[0x09,0x0E],[0x0A,0x9C],[0x0B,0x04], [0x0C,0x05],[0x0D,0x0F],[0x0E,0x02],[0x0F,0x12],[0x10,0x02],[0x11,0x02],[0x12,0x00],[0x13,0x01], [0x14,0x05],[0x15,0x07],[0x16,0x05],[0x17,0x07],[0x18,0x01],[0x19,0x04],[0x1A,0x05],[0x1B,0x0C], [0x1C,0x2A],[0x1D,0x01],[0x1E,0x00],[0x21,0x00],[0x22,0x00],[0x23,0x00],[0x25,0x01],[0x26,0x00], [0x27,0x39],[0x28,0x7F],[0x29,0x08],[0x30,0x03],[0x31,0x00],[0x32,0x1A],[0x33,0x1A],[0x34,0x07], [0x35,0x07],[0x36,0x01],[0x37,0xFF],[0x38,0x36],[0x39,0x07],[0x3A,0x00],[0x3E,0xFF],[0x3F,0x00], [0x40,0x77],[0x41,0x40],[0x42,0x00],[0x43,0x30],[0x44,0xA0],[0x45,0x5C],[0x46,0x00],[0x47,0x00], [0x48,0x58],[0x4A,0x1E],[0x4B,0x1E],[0x4C,0x00],[0x4D,0x00],[0x4E,0xA0],[0x4F,0x80],[0x50,0x00], [0x51,0x00],[0x52,0x00],[0x53,0x00],[0x54,0x00],[0x57,0x80],[0x59,0x10],[0x5A,0x08],[0x5B,0x94], [0x5C,0xE8],[0x5D,0x08],[0x5E,0x3D],[0x5F,0x99],[0x60,0x45],[0x61,0x40],[0x63,0x2D],[0x64,0x02], [0x65,0x96],[0x66,0x00],[0x67,0x97],[0x68,0x01],[0x69,0xCD],[0x6A,0x01],[0x6B,0xB0],[0x6C,0x04], [0x6D,0x2C],[0x6E,0x01],[0x6F,0x32],[0x71,0x00],[0x72,0x01],[0x73,0x35],[0x74,0x00],[0x75,0x33], [0x76,0x31],[0x77,0x01],[0x7C,0x84],[0x7D,0x03],[0x7E,0x01]) class PAJ7620(): def __init__(self, i2c, address=PAJ7620_ID): self.i2c = i2c self.address = address time.sleep(0.001) self.paj7620SelectBank(BANK0) data0 = self.paj7620ReadReg(0, 1)[0] data1 = self.paj7620ReadReg(1, 1)[0] if data0 != 0x20 or data1 != 0x76: print("Capteur en erreur") for i in range(len(initRegisterArray)): self.paj7620WriteReg(initRegisterArray[i][0], initRegisterArray[i][1]) self.paj7620SelectBank(BANK0) def paj7620WriteReg(self, addr, cmd): # Ecriture d'un octet dans un registre du capteur buf = bytearray(1) buf[0] = cmd self.i2c.writeto_mem(self.address, addr, buf) def paj7620SelectBank(self, bank): # Selection de la banque de registre if bank == BANK0: self.paj7620WriteReg(PAJ7620_REGISTER_BANK_SEL, PAJ7620_BANK0) def paj7620ReadReg(self, addr, qty): # Lecture d'un bloc a l'adresse 'addr' avec un nombre d'octets 'qty' return self.i2c.readfrom_mem(self.address, addr, qty) def gesture(self): # Retourne une valeur à partir du capteur # 0 : nothing # 1 : Forward # 2 : Backward # 3 : Right # 4 : Left # 5 : Up # 6 : Down # 7 : Clockwise # 8 : anti-clockwise # 9 : wave data = self.paj7620ReadReg(0x43, 1)[0] if data == GES_RIGHT_FLAG: time.sleep(GES_ENTRY_TIME) data = self.paj7620ReadReg(0x43, 1)[0] if data == GES_FORWARD_FLAG: return FORWARD elif data == GES_BACKWARD_FLAG: return BACKWARD else: return RIGHT elif data == GES_LEFT_FLAG: time.sleep(GES_ENTRY_TIME) data = self.paj7620ReadReg(0x43, 1)[0] if data == GES_FORWARD_FLAG: return FORWARD elif data == GES_BACKWARD_FLAG: return BACKWARD else: return LEFT elif data == GES_UP_FLAG: time.sleep(GES_ENTRY_TIME) data = self.paj7620ReadReg(0x43, 1)[0] if data == GES_FORWARD_FLAG: return FORWARD elif data == GES_BACKWARD_FLAG: return BACKWARD else: return UP elif data == GES_DOWN_FLAG: time.sleep(GES_ENTRY_TIME) data = self.paj7620ReadReg(0x43, 1)[0] if data == GES_FORWARD_FLAG: return FORWARD elif data == GES_BACKWARD_FLAG: return BACKWARD else: return DOWN elif data == GES_FORWARD_FLAG: return FORWARD elif data == GES_BACKWARD_FLAG: return BACKWARD elif data == GES_CLOCKWISE_FLAG: return CLOCKWISE elif data == GES_COUNT_CLOCKWISE_FLAG: return ANTI_CLOCKWISE else: data1 = self.paj7620ReadReg(0x44, 1)[0] if (data1 == GES_WAVE_FLAG): return WAVE return NOTHING
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195

HX711称重模块
演示Demo
from machine import Pin, I2C import utime from hx711 import HX711 from ssd1306 import SSD1306_I2C,SSD1306_SPI import framebuf import array i2c0 = I2C(0, sda=Pin(0), scl=Pin(1),freq=400000) devlist = i2c0.scan() print("I2C0 Address List:",devlist) for dev in devlist: print(hex(dev)) # Raspberry Pi logo as 32x32 bytearray buffer = bytearray(b"\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00|?\x00\x01\x86@\x80\x01\x01\x80\x80\x01\x11\x88\x80\x01\x05\xa0\x80\x00\x83\xc1\x00\x00C\xe3\x00\x00~\xfc\x00\x00L'\x00\x00\x9c\x11\x00\x00\xbf\xfd\x00\x00\xe1\x87\x00\x01\xc1\x83\x80\x02A\x82@\x02A\x82@\x02\xc1\xc2@\x02\xf6>\xc0\x01\xfc=\x80\x01\x18\x18\x80\x01\x88\x10\x80\x00\x8c!\x00\x00\x87\xf1\x00\x00\x7f\xf6\x00\x008\x1c\x00\x00\x0c \x00\x00\x03\xc0\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00\x00") # Load the raspberry pi logo into the framebuffer (the image is 32x32) fb = framebuf.FrameBuffer(buffer, 32, 32, framebuf.MONO_HLSB) WIDTH = 128 HEIGHT = 64 try: oled = SSD1306_I2C(WIDTH,HEIGHT,i2c0) except: pass oled.fill(0) # =============================================================== # channel=HX711.CHANNEL_A_128, capvalue=1010 # channel=HX711.CHANNEL_A_64, capvalue=505 hx711 = HX711(d_out=16, pd_sck=17, channel=HX711.CHANNEL_A_128, capvalue=1010) hx711.PowerOn() utime.sleep_ms(500) # 自动设置清零值 hx711.AutoCalibrationValue() # 手动设置清零值 #calval = hx711.ReadCount(HX711.CHANNEL_A_128) #print('calval',calval) #hx711.SetCalibrationValue(calval) hx711.Info() utime.sleep(1) while True: weights = hx711.GetWeights() print('W:',weights) #val = hx711.GetChannelBValue() #print(val) oled.fill(0) oled.text("Weights:{:.2f}V".format(weights), 0, 0) oled.show() utime.sleep_ms(100)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
驱动库hx711.py
import machine from machine import Pin import utime from micropython import const class HX711: CHANNEL_A_128 = const(1) CHANNEL_B_32 = const(2) CHANNEL_A_64 = const(3) def __init__(self, d_out, pd_sck, channel=CHANNEL_A_128, capvalue=429.50, interval=20, timeout=100): self.dk = Pin(d_out, Pin.OUT) self.do = Pin(pd_sck, Pin.IN) self.channel = channel self.timeout = timeout*1000 self.interval = interval self.lastread = 0 self.capvalue = capvalue self.calibration = 0 self.cur_count = 0 def AutoCalibrationValue(self): sums = 0 trys = 0 for i in range(50): count =self.ReadCount(self.channel) if (count != 0): sums += count trys += 1 if trys == 10: break else: utime.sleep_ms(10) print(sums, trys) count =int(sums/trys) self.SetCalibrationValue(count) def SetCalibrationValue(self, cal): self.calibration = cal print('calibration:', self.calibration) def PowerOff(self): self.dk.value(1) utime.sleep_ms(100) def PowerOn(self): self.dk.value(1) utime.sleep_ms(10) self.dk.value(0) utime.sleep_ms(100) def ReadCount(self, channel=CHANNEL_A_128): if (utime.ticks_us()/1000) < self.lastread: return self.cur_count else: self.lastread = int((utime.ticks_us()/1000)+self.interval) self.dk.value(0) #utime.sleep_us(1) count = 0 errtime = utime.ticks_us() while (self.do.value() == 1): start = utime.ticks_us() - errtime if start > self.timeout: return 0 pass for i in range(24): self.dk.value(1) utime.sleep_us(1) self.dk.value(0) count = count << 1; if self.do.value(): count += 1 # 第25个脉冲,下次转换通道A,增益128 if channel >= CHANNEL_A_128: self.dk.value(1) utime.sleep_us(1) self.dk.value(0) if channel >= CHANNEL_B_32: self.dk.value(1) utime.sleep_us(1) self.dk.value(0) if channel >= CHANNEL_A_64: self.dk.value(1) utime.sleep_us(1) self.dk.value(0) #utime.sleep_us(1) count = count^0x800000 self.cur_count = count return self.cur_count def GetWeights(self): count = self.ReadCount(self.channel) if count == 0: print('HX711 ReadCount Error.') return 0 #print('count:', count, 'calibration:', self.calibration) return float((count-self.calibration)/self.capvalue) def GetChannelBValue(self): count = self.ReadCount(CHANNEL_B_32) if count == 0: print('HX711 ReadCount Error.') return 0 return count def Info(self): print('CapValue:', self.capvalue) print('Calibration:', self.calibration) if self.channel == CHANNEL_A_128: print('Channel:A 128') elif self.channel == CHANNEL_A_64: print('Channel:A 64')
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

